You are right, I don’t know why I had it enabled. It didn’t change a whole lot. However, I was doing some tests this afternoon on my RX and TX ports (trying to send an echo into my serial port).
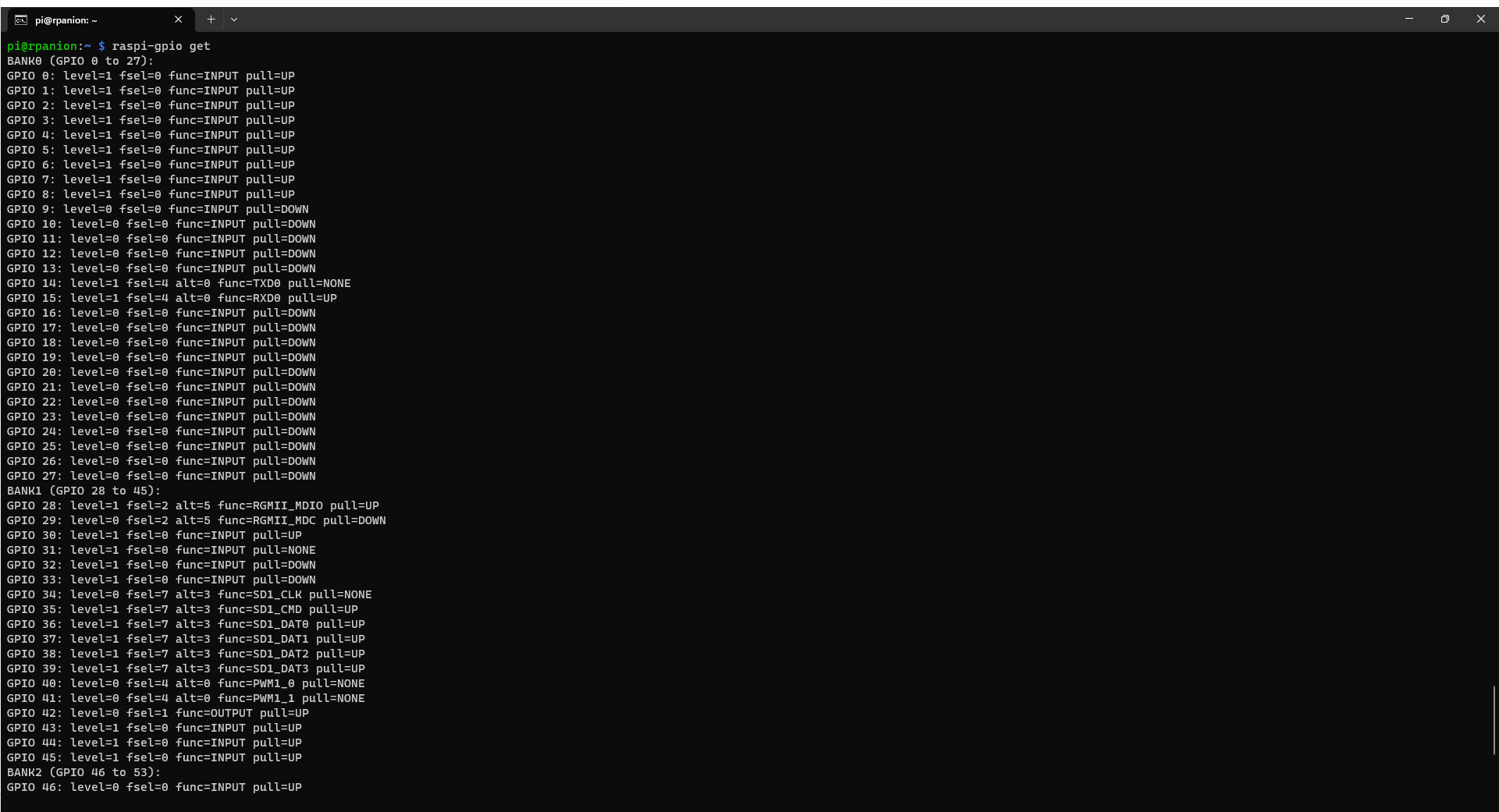
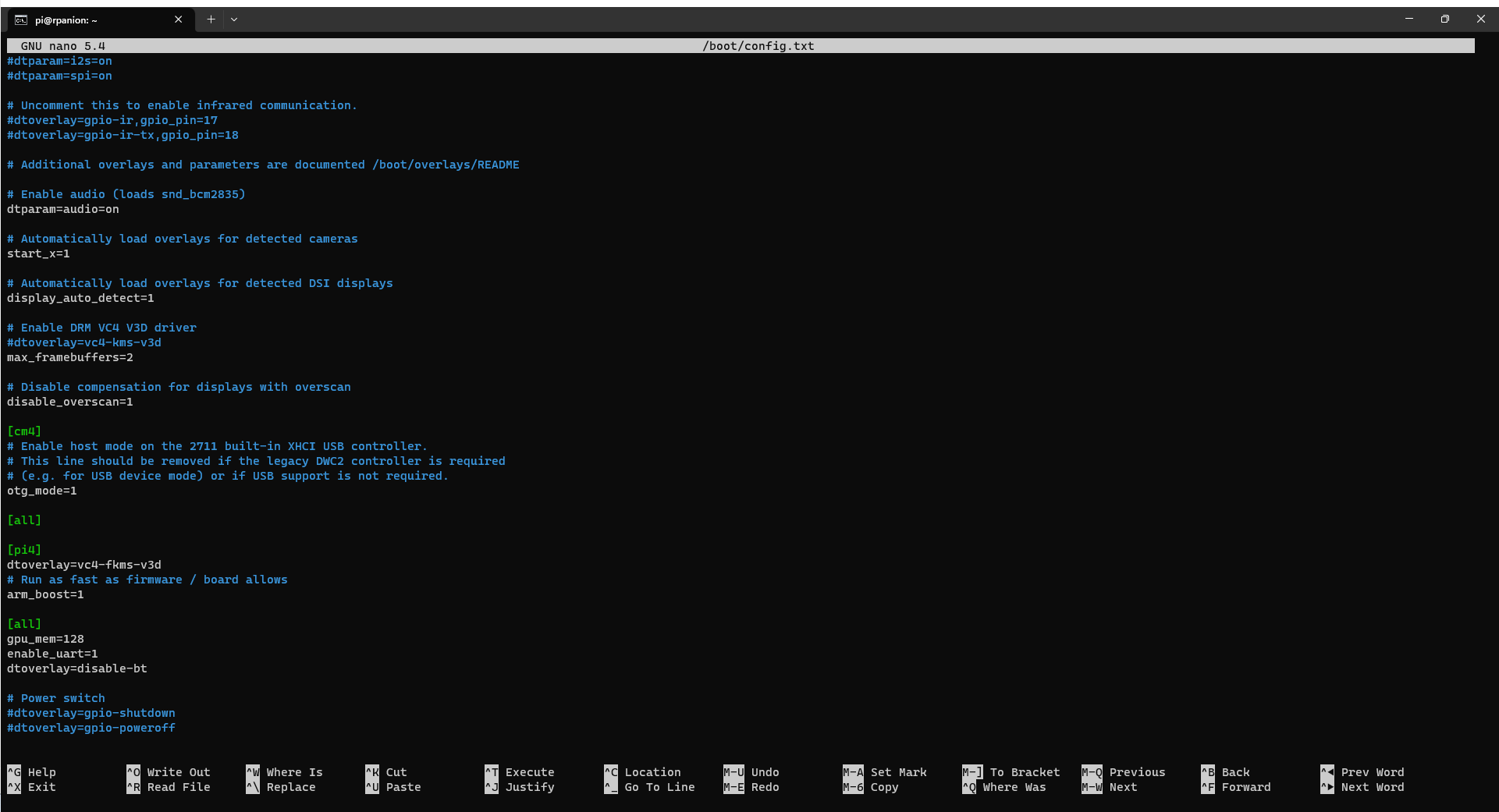
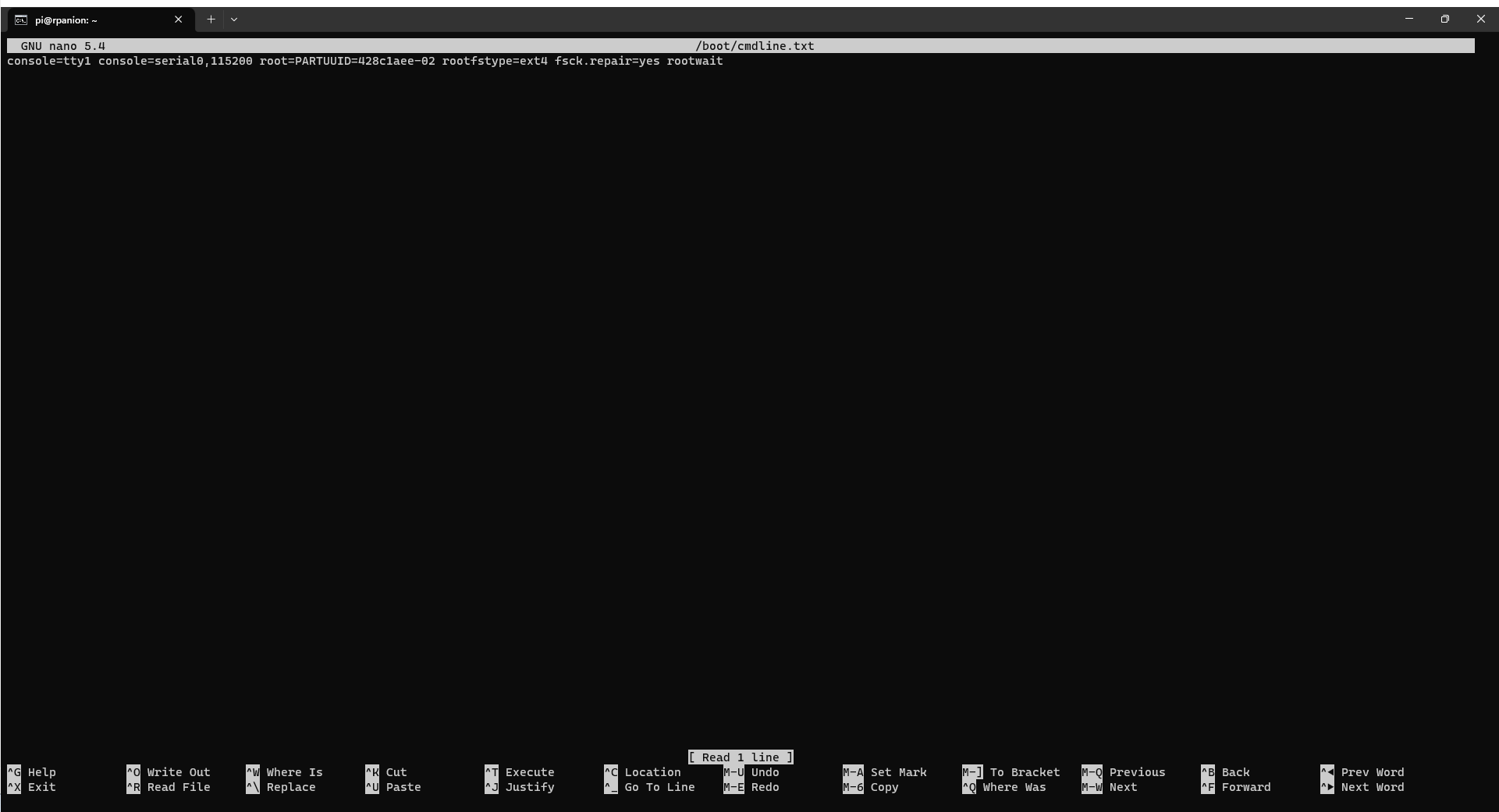
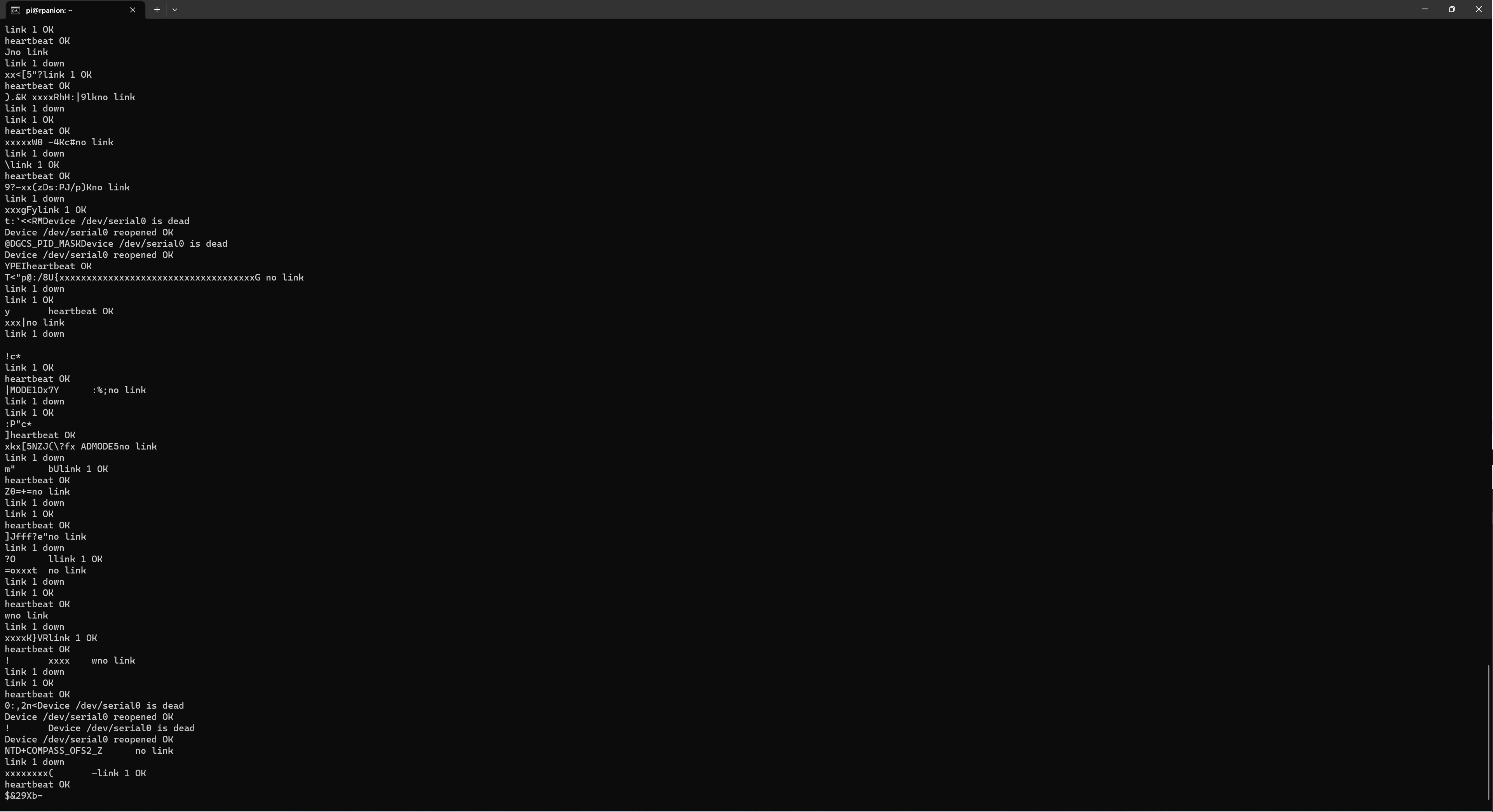
The only configuration that appears to be working is when I don’t disable the bluetooth in the config.txt file and change the pin usage of uart0 (dtoverlay=uart0, txd0_pin=32, rxd0_pin=33, pin_func=7).
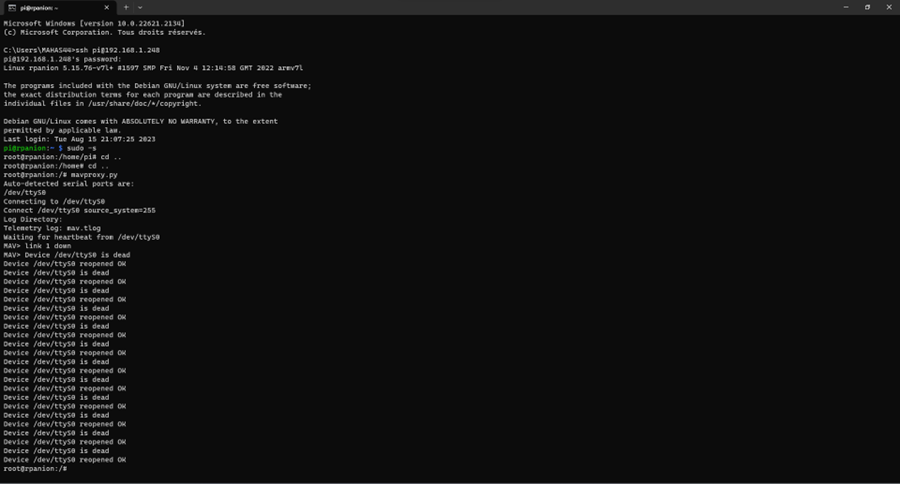
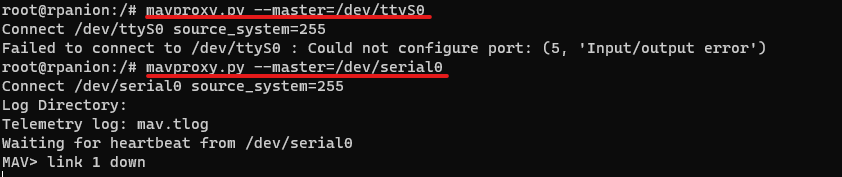
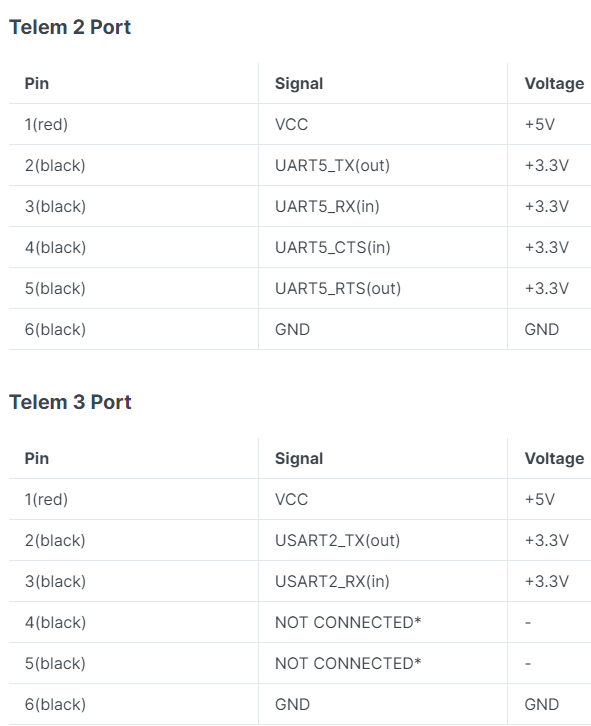
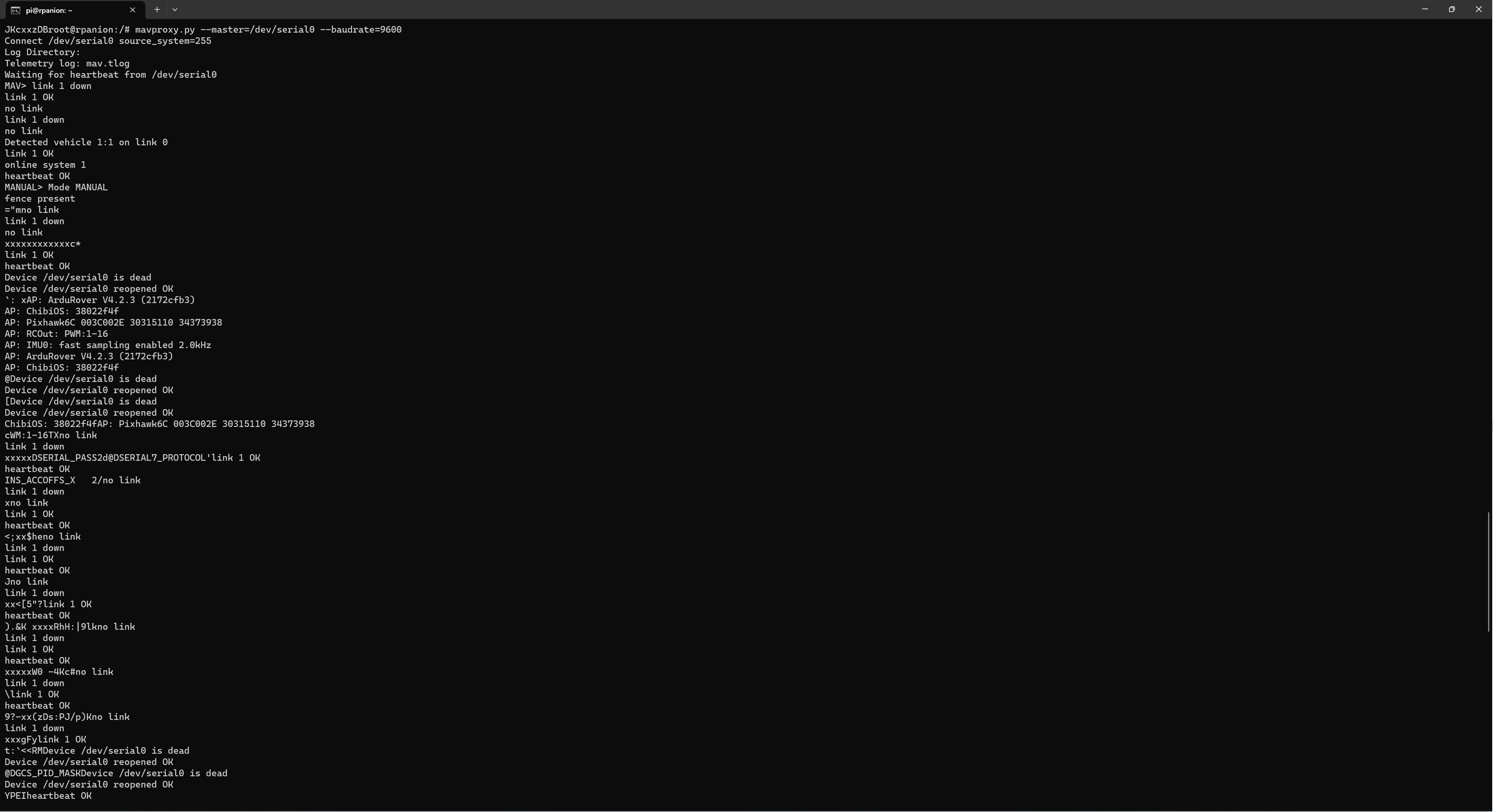
I am not entirely sure what that means, it has been so hard to find clear explanations online… But when I plug my autopilot on TELEM3 and run mavproxy.py --master=/dev/serial1, I now get a “good” output (see below for example - the commands I typed are bolded).
mavproxy.py --master=/dev/serial1
Connect /dev/serial1 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from /dev/serial1
MAV> Detected vehicle 1:1 on link 0
online system 1
MANUAL> Mode MANUAL
fence present
AP: ArduRover V4.2.3 (2172cfb3)
AP: ChibiOS: 38022f4f
AP: Pixhawk6C 003C002E 30315110 34373938
AP: RCOut: PWM:1-16
AP: IMU0: fast sampling enabled 2.0kHz
AP: ArduRover V4.2.3 (2172cfb3)
AP: ChibiOS: 38022f4f
AP: Pixhawk6C 003C002E 30315110 34373938
AP: RCOut: PWM:1-16
AP: IMU0: fast sampling enabled 2.0kHz
AP: ArduRover V4.2.3 (2172cfb3)
AP: ChibiOS: 38022f4f
AP: Pixhawk6C 003C002E 30315110 34373938
AP: RCOut: PWM:1-16
AP: IMU0: fast sampling enabled 2.0kHz
wp list
MANUAL> Requesting 2 waypoints t=Fri Aug 18 21:25:03 2023 now=Fri Aug 18 21:25:03 2023
re-requesting WPs []
16 0 0.0000000000 0.0000000000 0.000000 p1=0.0 p2=0.0 p3=0.0 p4=0.0 cur=0 auto=1
16 3 46.8059848000 -71.2453723000 100.000000 p1=0.0 p2=0.0 p3=0.0 p4=0.0 cur=0 auto=1
Saved 2 waypoints to way.txt
Saved waypoints to way.txt
time #no time because I don’t have GPS signal as I am testing indoors
MANUAL> No SYSTEM_TIME time available
status
MANUAL> Counters: MasterIn:[1800] MasterOut:85 FGearIn:0 FGearOut:0 Slave:0
MAV Errors: 0
None
55: AHRS {omegaIx : 0.0019977926276624203, omegaIy : -0.0016852348344400525, omegaIz : 0.00018157126032747328, accel_weight : 0.0, renorm_val : 0.0, error_rp : 0.00041464477544650435, error_yaw : 1.0}
55: AHRS2 {roll : -0.19092777371406555, pitch : 0.2435748130083084, yaw : 0.20045746862888336, altitude : 0.0, lat : 0, lng : 0}
54: ATTITUDE {time_boot_ms : 417459, roll : -0.19188277423381805, pitch : 0.2448255866765976, yaw : 0.5812029838562012, rollspeed : -0.001122887246310711, pitchspeed : -0.0005308238323777914, yawspeed : 0.0006290107266977429}
55: BATTERY_STATUS {id : 0, battery_function : 0, type : 0, temperature : 32767, voltages : [18738, 65535, 65535, 65535, 65535, 65535, 65535, 65535, 65535, 65535], current_battery : 2, current_consumed : 3, energy_consumed : 2, battery_remaining : 99, time_remaining : 0, charge_state : 1, voltages_ext : [0, 0, 0, 0], mode : 0, fault_bitmask : 0}
55: BATTERY_STATUS {id : 0, battery_function : 0, type : 0, temperature : 32767, voltages : [18738, 65535, 65535, 65535, 65535, 65535, 65535, 65535, 65535, 65535], current_battery : 2, current_consumed : 3, energy_consumed : 2, battery_remaining : 99, time_remaining : 0, charge_state : 1, voltages_ext : [0, 0, 0, 0], mode : 0, fault_bitmask : 0}
42: COMMAND_ACK {command : 410, result : 4, progress : 0, result_param2 : 0, target_system : 255, target_component : 230}
55: EKF_STATUS_REPORT {flags : 0, velocity_variance : 0.0, pos_horiz_variance : 0.0015112903201952577, pos_vert_variance : 0.0027783529367297888, compass_variance : 0.0, terrain_alt_variance : 0.0, airspeed_variance : 0.0}
374: FILE_TRANSFER_PROTOCOL {target_network : 0, target_system : 255, target_component : 230, payload : [77, 0, 3, 128, 80, 15, 0, 0, 240, 20, 0, 0, 69, 76, 88, 89, 0, 1, 57, 80, 79, 83, 90, 1, 1, 57, 86, 69, 76, 90, 0, 1, 41, 89, 65, 87, 0, 2, 119, 95, 79, 80, 84, 73, 79, 78, 83, 1, 0, 4, 180, 68, 82, 65, 71, 95, 66, 67, 79, 69, 70, 95, 88, 0, 0, 0, 0, 4, 15, 89, 0, 0, 0, 0, 4, 73, 77, 95, 78, 83, 69, 0, 0, 0, 63, 0, 4, 58, 67, 79, 69, 70, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]}
55: GLOBAL_POSITION_INT {time_boot_ms : 417459, lat : 0, lon : 0, alt : -4920, relative_alt : -4921, vx : 0, vy : 0, vz : 0, hdg : 3330}
55: GPS_RAW_INT {time_usec : 0, fix_type : 0, lat : 0, lon : 0, alt : 0, eph : 65535, epv : 65535, vel : 0, cog : 0, satellites_visible : 0, alt_ellipsoid : 0, h_acc : 0, v_acc : 0, vel_acc : 0, hdg_acc : 0, yaw : 0}
86: HEARTBEAT {type : 11, autopilot : 3, base_mode : 65, custom_mode : 0, system_status : 4, mavlink_version : 3}
55: HWSTATUS {Vcc : 5043, I2Cerr : 0}
55: MCU_STATUS {id : 0, MCU_temperature : 3587, MCU_voltage : 3306, MCU_voltage_min : 3296, MCU_voltage_max : 3314}
55: MCU_STATUS {id : 0, MCU_temperature : 3587, MCU_voltage : 3306, MCU_voltage_min : 3296, MCU_voltage_max : 3314}
55: MEMINFO {brkval : 0, freemem : 65535, freemem32 : 631936}
1: MISSION_COUNT {target_system : 255, target_component : 230, count : 2, mission_type : 0}
55: MISSION_CURRENT {seq : 0, total : 0, mission_state : 0, mission_mode : 0}
2: MISSION_ITEM_INT {target_system : 255, target_component : 230, seq : 1, frame : 3, command : 16, current : 0, autocontinue : 1, param1 : 0.0, param2 : 0.0, param3 : 0.0, param4 : 0.0, x : 468059848, y : -712453723, z : 100.0, mission_type : 0}
2: PARAM_VALUE {param_id : STAT_RUNTIME, param_value : 134868.0, param_type : 6, param_count : 836, param_index : 65535}
55: PID_TUNING {axis : 4, desired : 0.0, achieved : 0.0, FF : 0.0, P : 0.0, I : 0.0, D : 0.0, SRate : 0.0, PDmod : 0.0}
55: PID_TUNING {axis : 4, desired : 0.0, achieved : 0.0, FF : 0.0, P : 0.0, I : 0.0, D : 0.0, SRate : 0.0, PDmod : 0.0}
55: POWER_STATUS {Vcc : 4941, Vservo : 0, flags : 17}
55: RAW_IMU {time_usec : 417619670, xacc : 241, yacc : 183, zacc : -950, xgyro : -6, ygyro : 1, zgyro : 1, xmag : 0, ymag : 0, zmag : 0, id : 0, temperature : 4528}
55: RAW_IMU {time_usec : 417619670, xacc : 241, yacc : 183, zacc : -950, xgyro : -6, ygyro : 1, zgyro : 1, xmag : 0, ymag : 0, zmag : 0, id : 0, temperature : 4528}
55: RC_CHANNELS {time_boot_ms : 417579, chancount : 0, chan1_raw : 0, chan2_raw : 0, chan3_raw : 0, chan4_raw : 0, chan5_raw : 0, chan6_raw : 0, chan7_raw : 0, chan8_raw : 0, chan9_raw : 0, chan10_raw : 0, chan11_raw : 0, chan12_raw : 0, chan13_raw : 0, chan14_raw : 0, chan15_raw : 0, chan16_raw : 0, chan17_raw : 0, chan18_raw : 0, rssi : 255}
55: RC_CHANNELS_SCALED {time_boot_ms : 417800, port : 0, chan1_scaled : 0, chan2_scaled : 0, chan3_scaled : 0, chan4_scaled : 0, chan5_scaled : 0, chan6_scaled : 0, chan7_scaled : 0, chan8_scaled : 0, rssi : 255}
55: SCALED_IMU2 {time_boot_ms : 417659, xacc : 222, yacc : 181, zacc : -945, xgyro : 1, ygyro : 1, zgyro : 0, xmag : -124, ymag : -116, zmag : 294, temperature : 4400}
55: SCALED_PRESSURE {time_boot_ms : 417700, press_abs : 993.890625, press_diff : 0.0, temperature : 3264, temperature_press_diff : 0}
55: SERVO_OUTPUT_RAW {time_usec : 417559633, port : 0, servo1_raw : 0, servo2_raw : 0, servo3_raw : 0, servo4_raw : 0, servo5_raw : 0, servo6_raw : 0, servo7_raw : 0, servo8_raw : 0, servo9_raw : 0, servo10_raw : 0, servo11_raw : 0, servo12_raw : 0, servo13_raw : 0, servo14_raw : 0, servo15_raw : 0, servo16_raw : 0}
55: SERVO_OUTPUT_RAW {time_usec : 417559633, port : 0, servo1_raw : 0, servo2_raw : 0, servo3_raw : 0, servo4_raw : 0, servo5_raw : 0, servo6_raw : 0, servo7_raw : 0, servo8_raw : 0, servo9_raw : 0, servo10_raw : 0, servo11_raw : 0, servo12_raw : 0, servo13_raw : 0, servo14_raw : 0, servo15_raw : 0, servo16_raw : 0}
15: STATUSTEXT {severity : 6, text : IMU0: fast sampling enabled 2.0kHz, id : 0, chunk_seq : 0}
55: SYSTEM_TIME {time_unix_usec : 0, time_boot_ms : 417800}
55: SYS_STATUS {onboard_control_sensors_present : 321969167, onboard_control_sensors_enabled : 320897039, onboard_control_sensors_health : 34636043, load : 47, voltage_battery : 18951, current_battery : 3, battery_remaining : 99, drop_rate_comm : 0, errors_comm : 0, errors_count1 : 0, errors_count2 : 0, errors_count3 : 0, errors_count4 : 0}
8: TIMESYNC {tc1 : 0, ts1 : 410819613001}
55: VFR_HUD {airspeed : 0.0, groundspeed : 0.0, heading : 33, throttle : 0, alt : -4.869999885559082, climb : -0.0}
55: VIBRATION {time_usec : 418000093, vibration_x : 0.007128438446670771, vibration_y : 0.00808044895529747, vibration_z : 0.0075416602194309235, clipping_0 : 0, clipping_1 : 0, clipping_2 : 0}
reboot
MANUAL>
M0fAP: Calibrating barometer
INITIALISING> Mode INITIALISING
AP: Barometer 1 calibration complete
AP: Beginning INS calibration. Do not move vehicle
MANUAL> Mode MANUAL
AP: ArduPilot Ready
AP: AHRS: DCM active
AP: RCOut: PWM:1-16
Time has wrapped
Time has wrapped 3798 432119
AP: EKF3 IMU0 initialised
AP: EKF3 IMU1 initialised
AP: EKF3 IMU0 tilt alignment complete
AP: EKF3 IMU1 tilt alignment complete
AP: EKF3 IMU0 forced reset
AP: EKF3 IMU0 initialised
AP: EKF3 IMU0 tilt alignment complete
fence list
MANUAL> No geo-fence points
As you can see, noise problem is gone. With the configuration I have now, do you think I am using miniUart instead of PL011 Uart? Right now, the equivalences of ports (serial VS tty) is shown below:
Thanks again for all your replies!