As part of my ongoing project to support companion computers in Ardupilot, I’ve released a new software suite: Rpanion-server.
It is similar to other software (such as APSync) in that it provides a web-based interface for managing telemetry, video streaming and networking.
It is designed to complement the Pi-Connect boards I’ve manufactured (which ease the integration of Raspberry Pi’s into Ardupilot-powered vehicles). The Pi-Connect is not required to run the software though.
It’s usable, but still in beta. So any bug reports are appreciated!
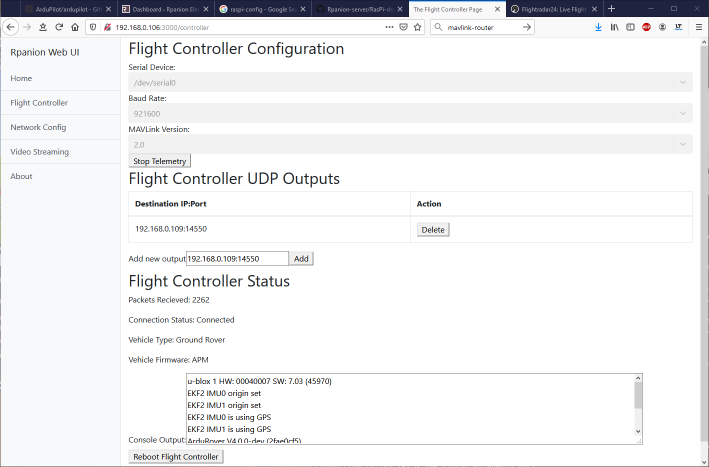
Telemetry:
Allows the user to select serial port, baud rate and MAVLink version of the connected flight controller. Provides basic information of the flight controller status and allows for dynamic adding/removing of UDP endpoints for telemetry forwarding:
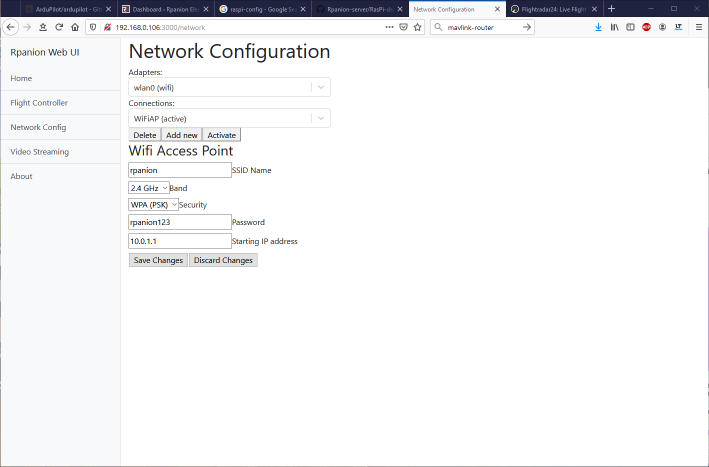
Network
Network connections can be added/edited/removed - both Ethernet and Wi-Fi. It also supports Wi-Fi hotspots.
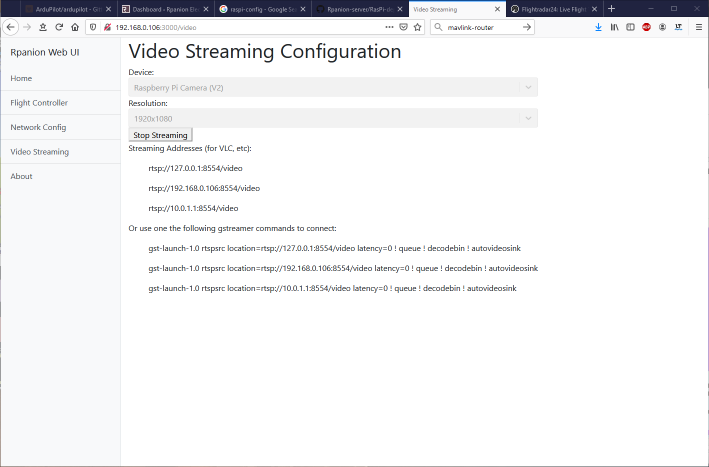
Video Streaming
Any compatible video device (Raspberry Pi Camera, most USB webcams) is compressed to H.264 format and streamed as a low-latency video stream. User can select device and resolution:
Compatibility
Rpanion-server is built using the NodeJS/React frameworks and should run on any Linux-based device with a NodeJS (12+) install.
It’s been tested as working Raspian and Ubuntu.
Installing/Details
Rpanion-server is released under the GPL licence and the source code (plus installation instructions) are here: https://github.com/stephendade/Rpanion-server.
I’ve also got a prebuilt image for Raspian here: https://rpanion-files.s3-ap-southeast-2.amazonaws.com/Rpanion-server/Rpanion-Server-0.4.0-Raspian.img.xz. It comes configured as a Wi-Fi access point “rpanion”, password “rpanion123” and the Rpanion-server address as http://10.1.1.1:3000
 might have the camera mounted upside down…
might have the camera mounted upside down…