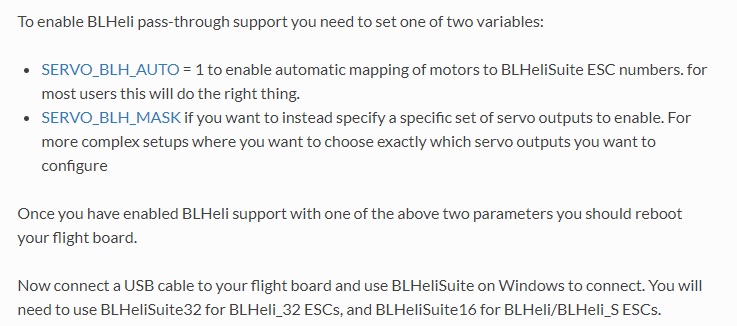
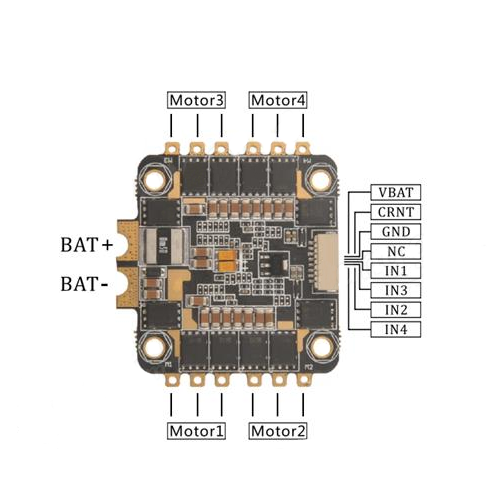
Hi there. I have a Pixhawk 2.4.8 on my F450 Flamewheel and would like to replace my ESC’s with a 4 in 1 ESC. I brought a Foxracer 35A ESC like in the picture attached. Is it possible to run the ESC on this Pixhawk and program it through BL Heli passthrough? Thanks for your help in advance. Kind regards. Wimpie.
You can run it no problem. Regarding passthrough if it’s a BLHeli32 ESC it will most likely work. If it’s BLHeli_S maybe not. I have examples of both cases.
Hi there Dave. Thank you for our response. Is it possible that you can help me figure out how to doe the wiring? My apologies for asking straight away. If it is BL Heli S, what are my options? Thanks for your help so far.
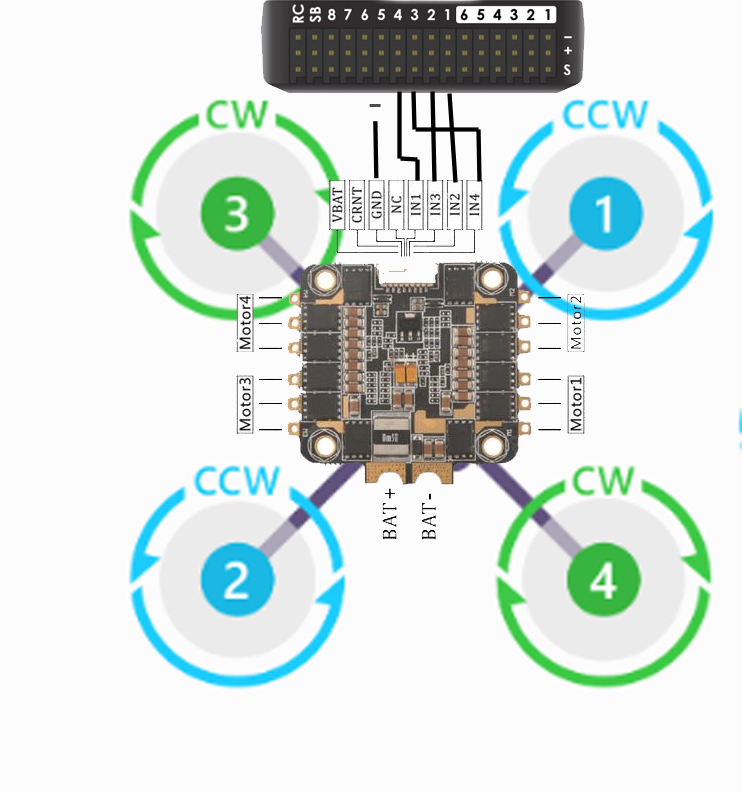
Hi Wimpie- You can try passthough but it might not work. Attached is one way you can connect the 4in1 to your Pixhawk. What’s important is that the channel order is correct for a quad. You can rotate the 4in1 in any direction you like to suite the position of the battery input connector to your frame just keep the Pixhawk output channel to Motor position correct. So make the signal wire connections as shown and connect the Gnd to any GND pin on the Pixhawk (chanell doesn’t matter).
For this connection you will have to set your MotorPWM type to 0,1 or 2. If you want to use Dshot it is connected to the Pixhawk on different channels (Aux 1-4) and assigned accordingly.
Hi there Dave.
Thank you for your response, I am starting to feel better now. This ESC supports oneshot/ multishot / Dshot. Apparently Dshot is better. If I set up my Aux channels, will it also be on 1 to 4 for the motor assignments? I understand the motor sequence now, thanks for the clarification. Is there a tutorial of video or procedure somewhere that I can follow to set up the ESC in Pixhawk on the Dshot protocol?
Thank you again for your help, I highly appreciate it.
Yes, this Wiki entry is pretty detailed. A key point is you will be using Aux 1-4 which are Servo9_FUNCTION to Servo12_FUNCTION in Mission Planner. Those would be set to motors 1-4 (33-36)
Hi the Dave.
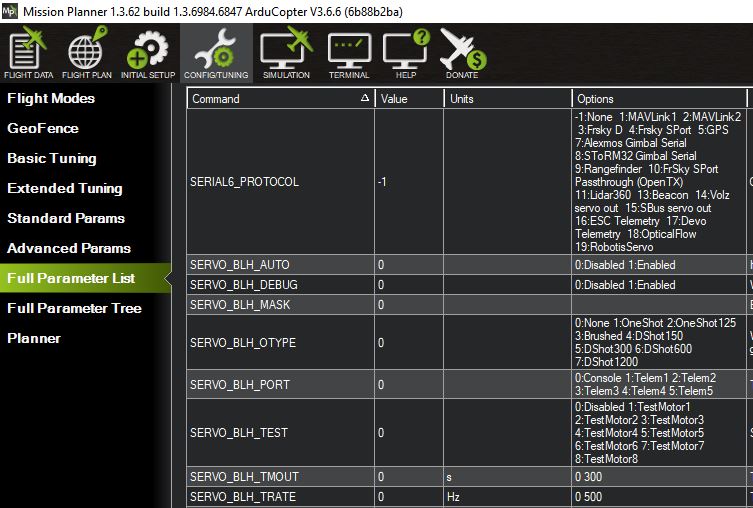
I have followed the instructions on the Wiki so far. I have mapped the Aux channel for the motors and disabled the others, however I do not see the parameters on the full list of parameters I have to adjust on the picture below:
Oh my goodness!! Thanks a lot, I was still on the old version of ArduCopter, I updated to version 3.6.6 and Voila!! Thanks Dave and iampete for your inputs, I will now try to see if the ESC is going to work. I set the MOT_PWM_TYPE to 6 for DShot600, will it work? Or should I stay with the DShot150?
Thank you so much for your patience with me, I really appreciate it a lot!!
Happy to help. I would start with Dshot150. You would not realize any benefit with anything higher anyway on a craft that size. Once you have it flying and everything else sorted you could try it if you like.
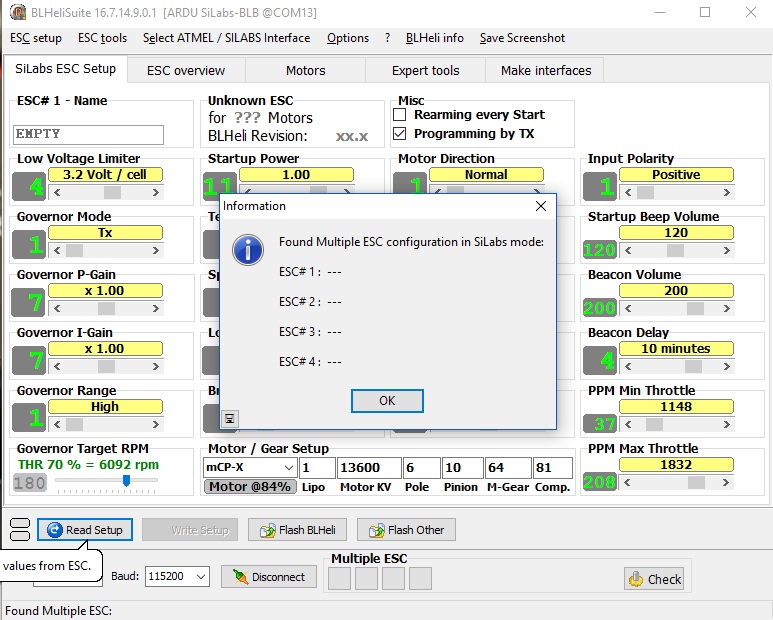
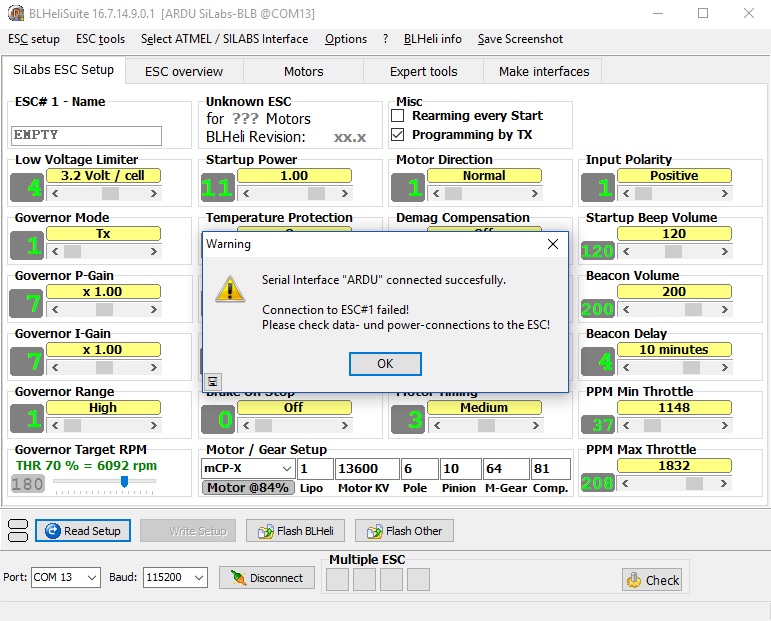
Hi Dave. It’s me again. I have connected my ESC’s on the Aux Ports as shown in the Wiki and Assigned my Aux Channels. I enables the passthrough and it does connect on the specific Com Port. However I do get the following message boxes as shown in the pictures below. It does not read the ESC’s and shows the error message after clicking OK.
Battery power connected? If so unfortunately that probably means it’s not going to work. All my BLHeli32 ESC’s work OK with passthrough but the BLHeli_S do not. That doesn’t necessarily mean you can’t use Dshot just that you can’t use the Suite with Passthrough.
Yup battery power is connected and ESC’s give startup tones. Do you suggest that I try using the ESC’s like it is? All I basically want to do is Change the direction of one of the motors, the others are already turning in the right direction. :-). Maybe just change the wires then?
Will it work of I program the ESC’s through my racing drone flight controller and then transfer it to my F450 with Pixhawk?
I have an Armattan Chameleon with a CL_Racing_F4S flight controller with exactly the same ESC and it works perfectly. I thought maybe I can connect the ESC to my other FC and use the BLHELI app and program the ESC and transfer it to the Pixhawk…just a thought. Do you think it might work?
That should work fine. In fact before Arducopter passthrough, and with these BLHeli_S ESC’s I use(d) an old Naze32 FC running an old version of Betaflight for ESC programming purposes only. Usually just to change motor direction as you state.
At some version level of Betaflight naze32 is no longer supported. I don’t recall which version was the last supported. If it doesn’t work let me know and I’ll dig it out!
Hi there Dave. I trust that you are well. Just wanted to give you some feedback. I connected the ESC to my CL_Racing_F4s and used the BLHeliSuite and it worked awesome, the reason I used it is because it comes with a cable for connecting to a 4 in 1 and I don’t need to make something to connect it.
I had the ESC firmware updated in a flash and motor directions as well as adjusting the beep volumes and time. I finished the assembly of my whole F450 last night and will take it for a test flight today.
Thanks again for all your help and patience, I really appreciate it.
Kind Regards.
Wimpie
 This ESC supports oneshot/ multishot / Dshot. Apparently Dshot is better. If I set up my Aux channels, will it also be on 1 to 4 for the motor assignments? I understand the motor sequence now, thanks for the clarification.
This ESC supports oneshot/ multishot / Dshot. Apparently Dshot is better. If I set up my Aux channels, will it also be on 1 to 4 for the motor assignments? I understand the motor sequence now, thanks for the clarification.