First up you wont need to run ESC calibration. Use DSHOT600, it’s easy and way better than ordinary old PWM.
The real roadblock here is powering your flight controller - you need a BEC capable of 5.2v 3amps, or the power brick that came with it.
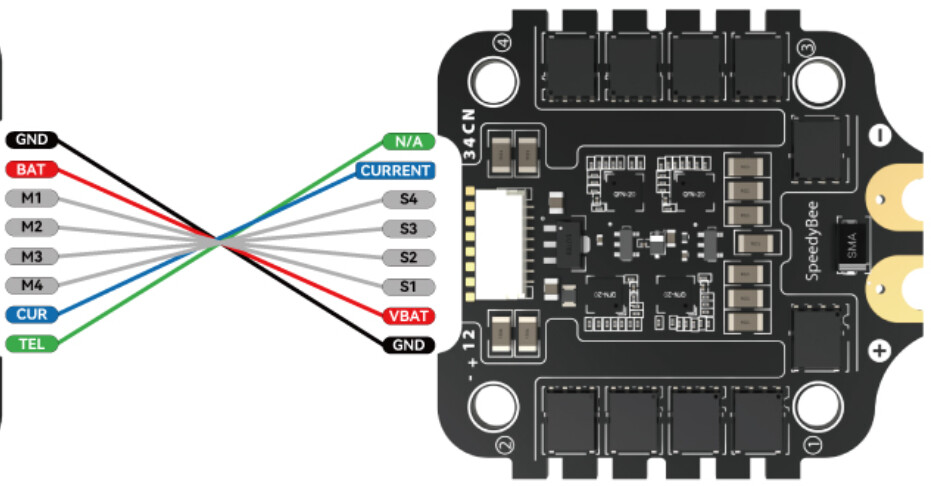
If you use a small separate BEC, the ESC can still provide the battery voltage and current data via it’s Curr wire and the Telem data. The alternative is to ignore the Curr wire and remove it from the connector housing
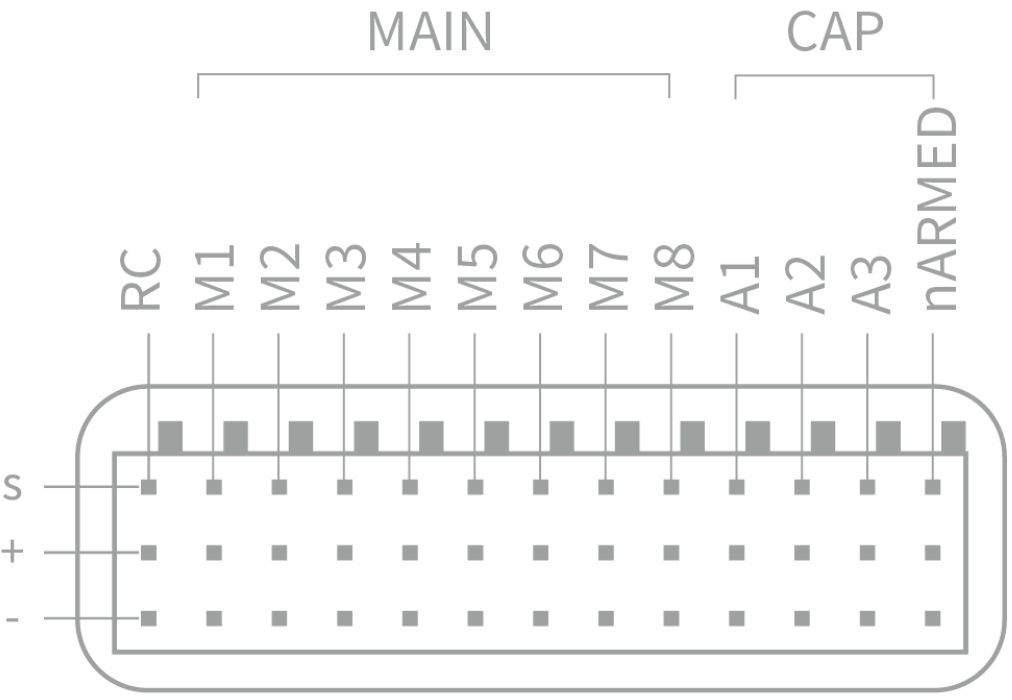
You are correct about the S1 → M1 relationship, connecting to the S pins
However on the CUAV V5 Nano I have here the M1 has never worked for DSHOT, so be prepared to bump all your connectors along one position. You might end up using M2 to M5, it’s no big deal and easy to adjust.
The GND wire should also connect to a - pin on the servo output pins.
The VBAT wire wont be used and should not be allowed near the flight controller  so you can either securely terminate it or remove it from the connector housing entirely. I would not even use this wire to run a BEC for supplying the V5 Nano, because the wire is usually incredibly thin and I wouldnt trust it to supply a couple of amps continuously.
so you can either securely terminate it or remove it from the connector housing entirely. I would not even use this wire to run a BEC for supplying the V5 Nano, because the wire is usually incredibly thin and I wouldnt trust it to supply a couple of amps continuously.
The Curr wire is similar - you can go to the trouble of routing it to the V5 Nano Power input connector, and current data is nice to have, but not as essential as the battery voltage. I would tend to remove it from the connector housing too. We can live without the current data.
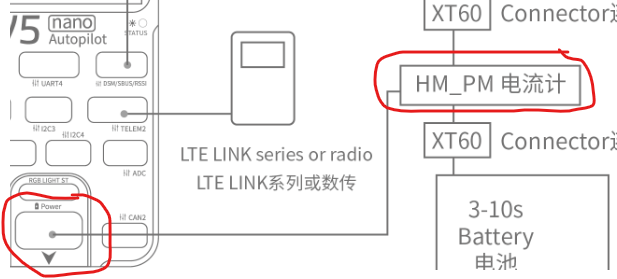
If you are NOT using the power brick that came with the V5 Nano, you’ll need to route a BEC +5.2v and ground wires to both of the appropriate pairs of inputs here too.
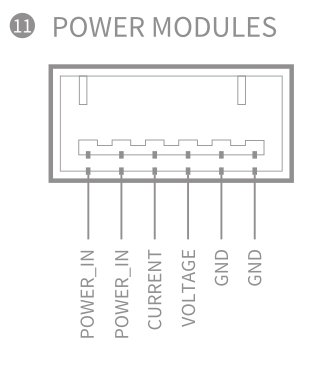
The Voltage and Current pins would remain unused.
If you are using the CUAV power brick, then there are no changes to make to it, except ALL current should flow through it - meaning it would have to be wired between the ESC and the battery. You might not have space for this.
The Telem wire should be connected to UART4 RX input on the V5 Nano.

For Arducopter settings:
BATT_MONITOR,9 // use ESC telem data
BRD_SAFETY_DEFLT,0 // disble the safety switch
MOT_PWM_TYPE,6 // set DSHOT600
SERIAL4_BAUD,115 // set up UART4 for the telem data
SERIAL4_OPTIONS,16
SERIAL4_PROTOCOL,16
SERVO_BLH_AUTO,1 // you dont need anymore servo settings than what is listed here
SERVO_BLH_RVMASK,* // useful later for reversing motors, it is a bitmask
SERVO_DSHOT_ESC,2
and after a reboot you should have passthrough working, although you probably wont need to change any BLHELI settings at all.
You can choose whether to reverse a motor in the BLHELI_S configuration app, or with the SERVO_BLH_RVMASK in arducopter settings (this works for BLHELI32, unsure about BLHELI_S)
In the MissionPlanner messages tab you should see something like:
RCOut: DS600:1-8 PWM:9-14
indicating DSHOT600 will be used for some V5 Nano outputs.
Extensive use of the MissionPlanner motor test section is highly recommended. The motor “numbering” changes to motor “lettering” in the motor test section.
Try setting your frame type to BetaFlightX and reboot, the motor order may be correct.
FRAME_TYPE,12
When you select the test “All in Sequence” you should see motors activate in A , B , C , D order.
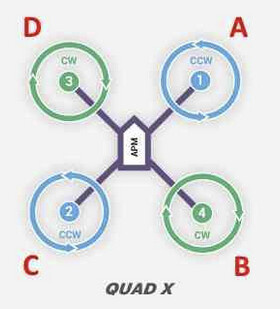
Be sure to get all the clockwise / counter-clockwise spin direction correct.
In your github it specifies a 6S Lipo, put in these settings:
BATT_ARM_VOLT,22.1
BATT_CRT_VOLT,21
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
BATT_LOW_VOLT,21.6
Dont think you can ignore them “just for testing” or any other reason.
Yell out if you run into any issues.