hello everyone ,
i did my first test flight to my 17 inch octa quad with 5010 motors and the flight in stabilize were very good,
1.in alt hold the attitude of the drones was good but the height hold was kinda slugish and within 0.5-1 meter up and down what parameters can help me with that and the? i have tried psc_jerk_z
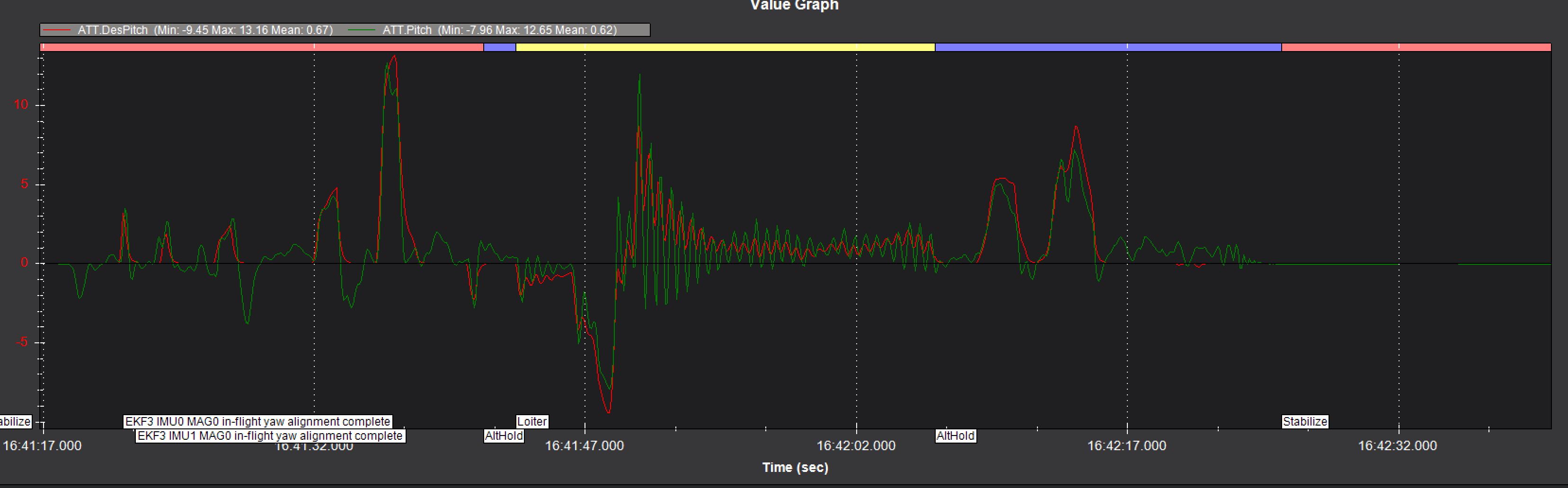
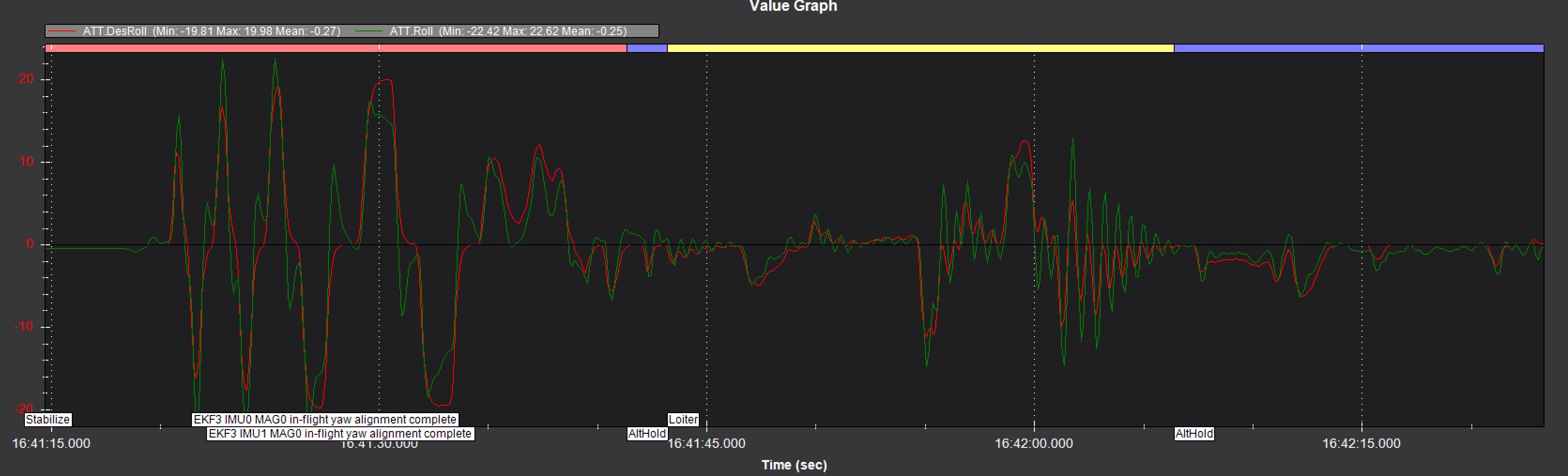
2.in loiter i have hard oscillation i have looked in the log and it seems like the pid could be alot better i will auto tune it but i dont think that is the problem (vibe in the 18 max in z the others max 10)
i have tried to change the vrj jerk and brk accel and psc_posxy_p but didnt see and big diffrence
what am i missing?
3.when i command preflight_reboot from the mission planner the quad spins the prpelloers for few secs - i thought its an old bug but i still get it with 4.4.4 - matek h743 v3 wing with speedybee v4 esc 55a
logs:
i will try to follow it i did the mandotory setup and followed the ardupilot guide but got stuck in the loiter , will try to follow youre guide,
btw the imu calibration temp must happened from the freezer at the start? i cannot dissemble the flight controller that easily from the frame
Clearly not. The tune is poor with Pitch/Roll oscillation. Perhaps due to the Pitch/Roll I term being higher than P. Among other non-addressed parameters.
Yes, if you want a proper working drone. But you can do it with the entire frame as well, just remove the batteries.
And if that is not possible, you can skip it. But you are not allowed to complain here that you get accels, gyros and/or compasses inconsistent errors.
No, each different Matek 743 will produce different results. You must not use the results of one board on another board. That will actually get worse results than not calibrating.
It seams to me that you did not read the section 2.1 of the Blog post
after re-read the blog and getting a better tune and if you still face the Loiter oscillation or twitch, you may like to check this post and this post. It solved in my case.
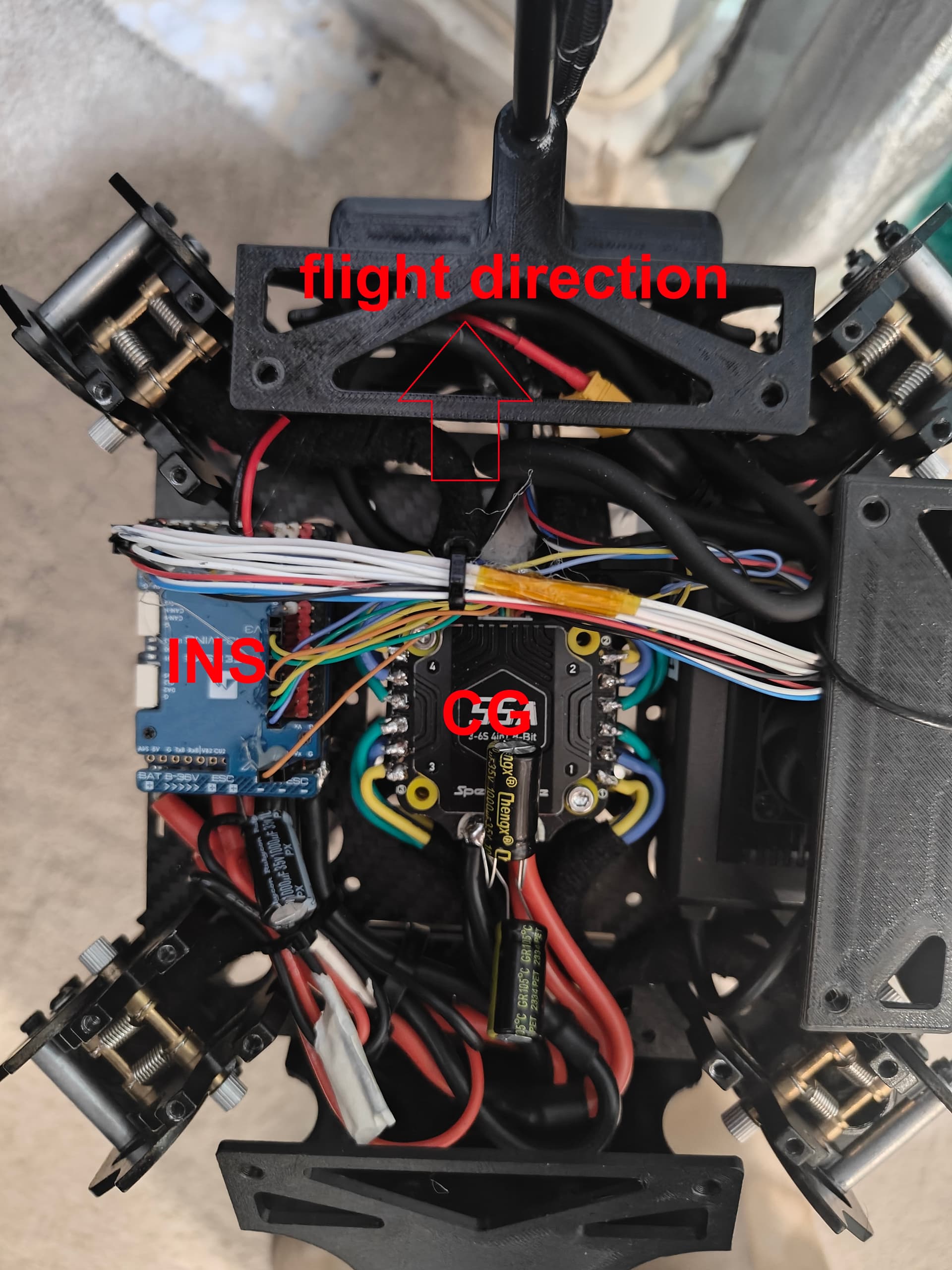
i have one thing that i dont feel sure about is the ins pos its also mention in the file “12_general_configuration”
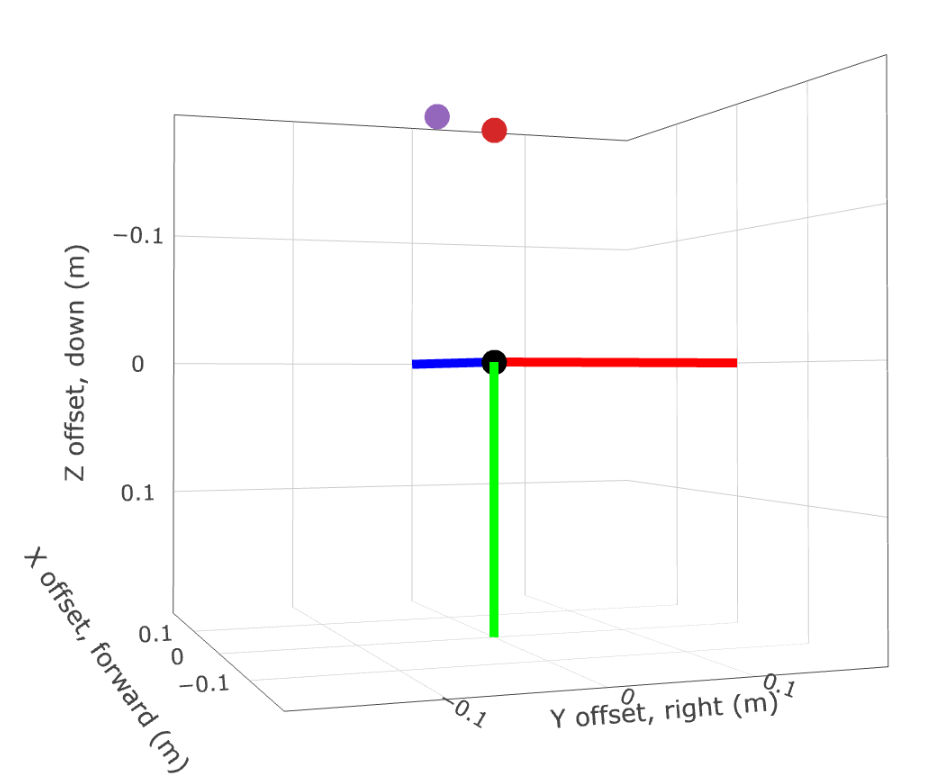
this is the setup of the ins to the cg realtive to that picture:
the parameters should be :
INS_POS1&2_X: 0.08
INS_POS1&2_Y: -0.50 so its left from the cg origin thats corccet? “Positive Y is to the right of the origin”
I feel like you are missing two zeros here, 0.08 means 80 mm forward and -0.50 means 500 mm to the left. INS_POS1&2_X = 0.008 INS_POS1&2_Y = -0.050
is probably what you want/meant.
Apart from that, according to the documentation a noticeable performance improvement is unlikely with offsets <15 cm. You can probably put the calculation power to better use somewhere else.
the offset is 50mm to the left and 8mm forward , its a small frame ,
i just wanted to know that offset is correct realtive to the cg and so it means - from the cg and not from the ins to the cg
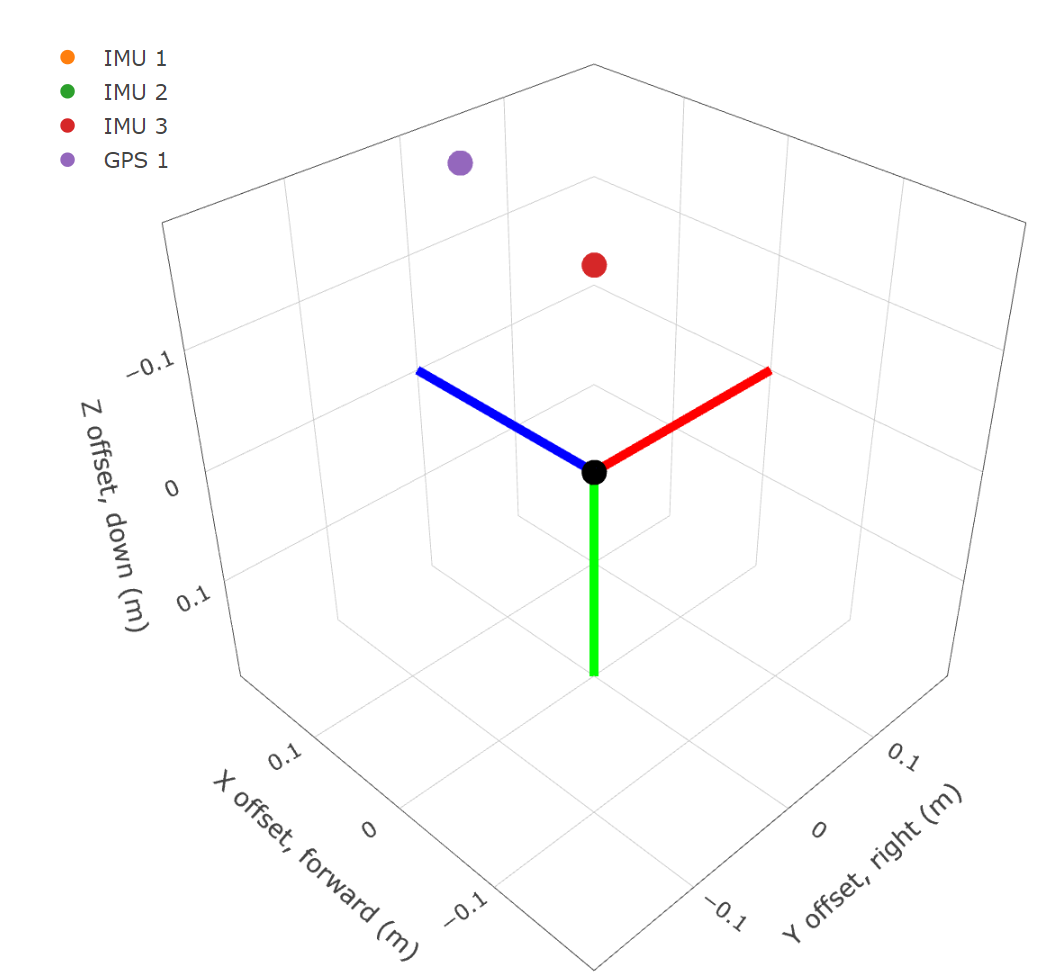
you can also use this web tool to double confirm it.
LOG_DISARMED,1
reboot, after collecting for a few minutes
LOG_DISARMED,0
upload the log file to check, you can rotate the graphics to further check it.
I experienced the same thing when setting up my 13 inch 12s drone. Running dshot600 with shielded wire, and matekh743 slimv3 fc. Problem gone away when changing to dshot300 but I’m curious about the cause. Could anyone explain this to me?
when im tring to use the log filter to test the filters i get error from the site “No tracking data available for Throttle notch”
how can fix it i? -ns_log_bat_opt 4
It will if you flash Bluejay firmware which is the 1st thing that should be done by anyone that made the mistake of buying a BLHeli_S ESC instead of a BLHeli_32 ESC.