You position controller values are normal and this should give very tight position holding.
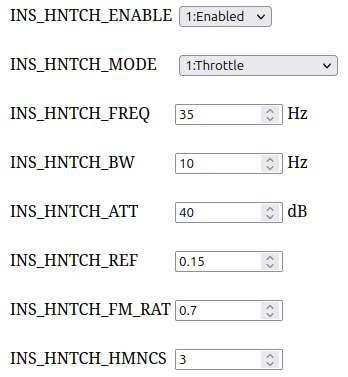
There are still some slight attitude control issues. I would set up the harmonic notch filter as per below and run Autotune again.
Also GPS HDOP goes poor during that flight, which may affect how Loiter behaves. Set this to limit the number of constellations:
GPS_GNSS_MODE,65 or 5
For example I get lots of beidou satellites but they give a poorer HDOP.
Try these Loiter values to see if that feels better, they work well for me:
LOIT_ACC_MAX,600
LOIT_ANG_MAX,30
LOIT_BRK_ACCEL,300
LOIT_BRK_DELAY,0.3
LOIT_BRK_JERK,300
There is no notch filter set up in that log, use just the values I provided - I rechecked that log you provided to be sure.
Maybe disable Fast Attitude logging too - it seems like it would be an essential tuning tool, but in reality Leonard Hall is about the only person that knows how to make full and proper use of it. Autotune automatically enables fast attitude logging while it is working.
So combine all those things (except Autotune) into one flight and see what that is like.
EDIT:
Counter-intuitively, the bigger copters sometimes need the position controller relaxed a bit so the big copter doesnt try to follow tiny (GPS) position changes so strictly, and appearing as oscillations.
Keep this strategy as backup plan in case the other things already mentioned still dont work as expected.
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
These are just half of default values, so easy to put back if you need to.