@neel_chhatrala provide a .zip file with the ArduPilot Methodic Configurator edited intermediate parameter files.
It makes no sense finding the correct notch filter frequency if all the other parameters are wrong.
You need to do this in a particular sequence and get all parameters right. Every single one!
MyVehicleName.zip (856.1 KB)
here is my zip file for the same
in temp calibrfation i setup the parameter from mission planner so it may not there in the zip file i send to you
You created three different vehicle configuration directories from template instead of just opening the vehicle directory.
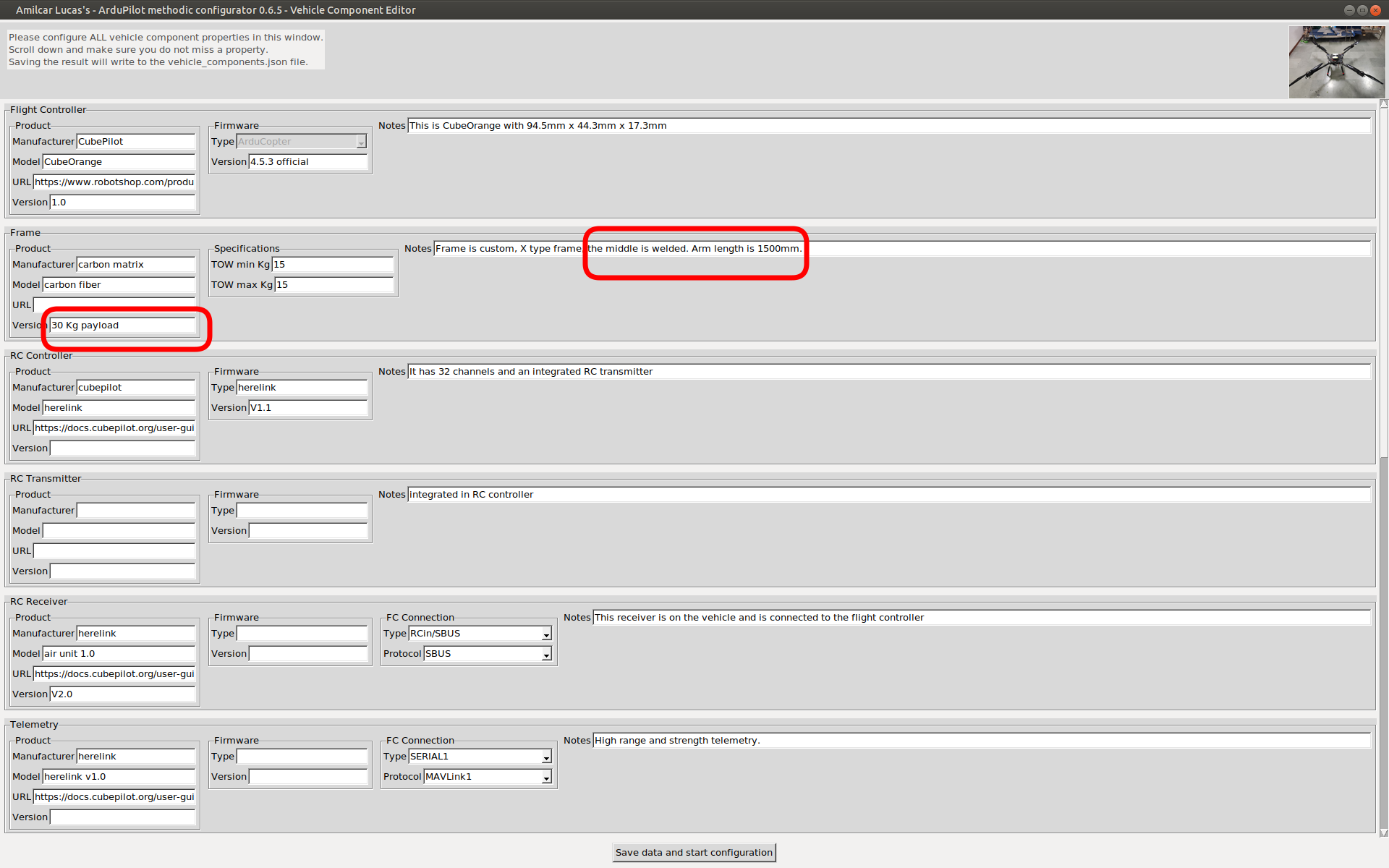
You failed to update the ALL component information in the component editor window.
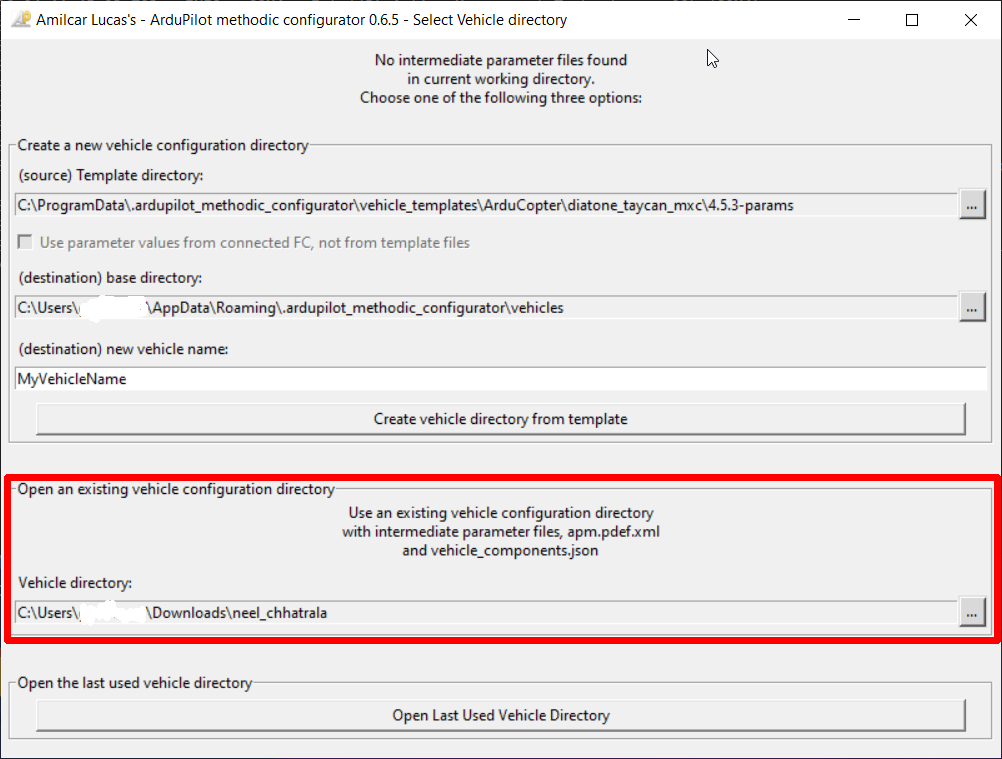
here are your files, updated and cleaned: Just extract to a directory and select “Open an existing vehicle template directory” in ArduPilot Methodic Configurator
Open the newest .zip file I sent you.
Extract it
Open the directory in the configurator
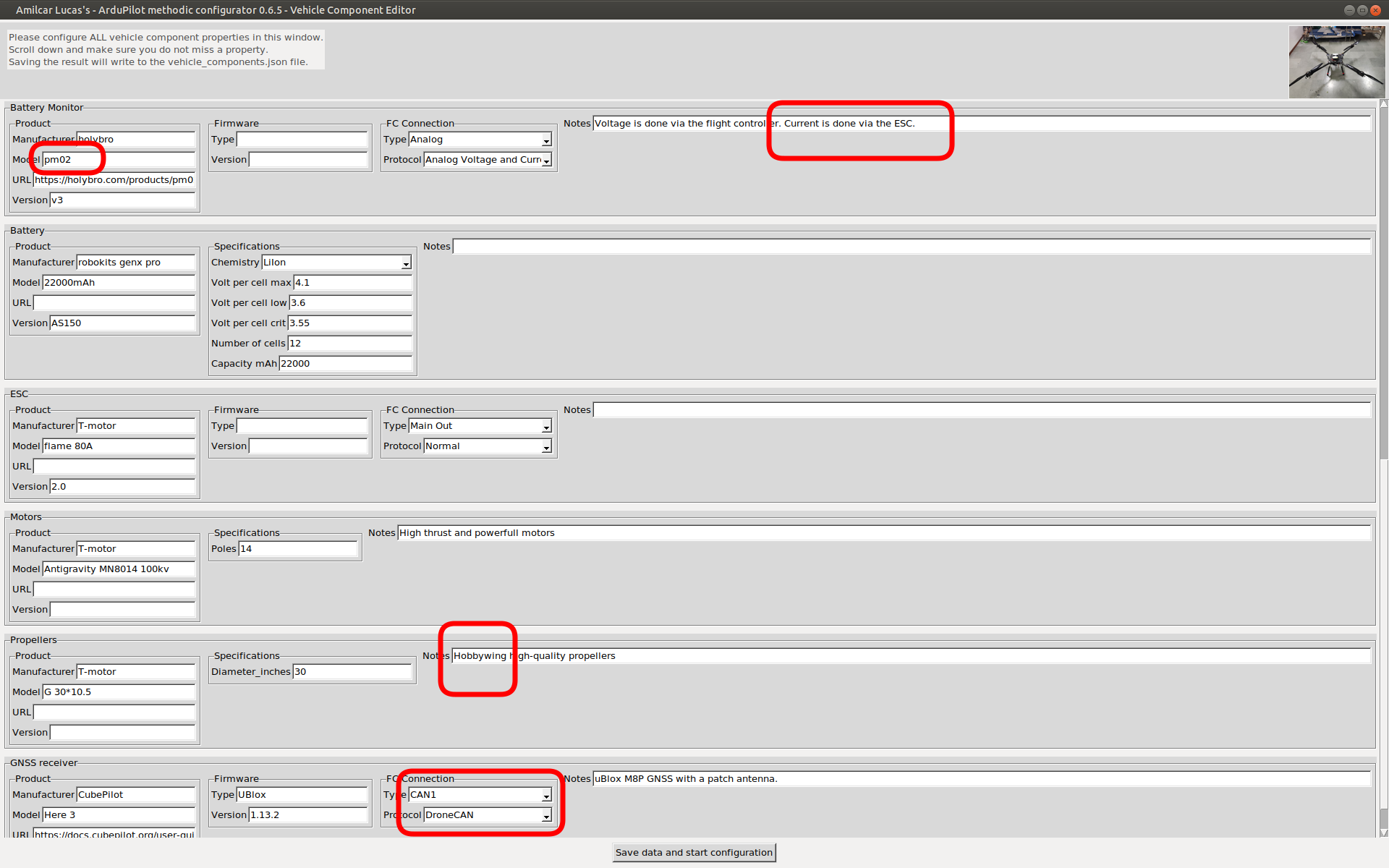
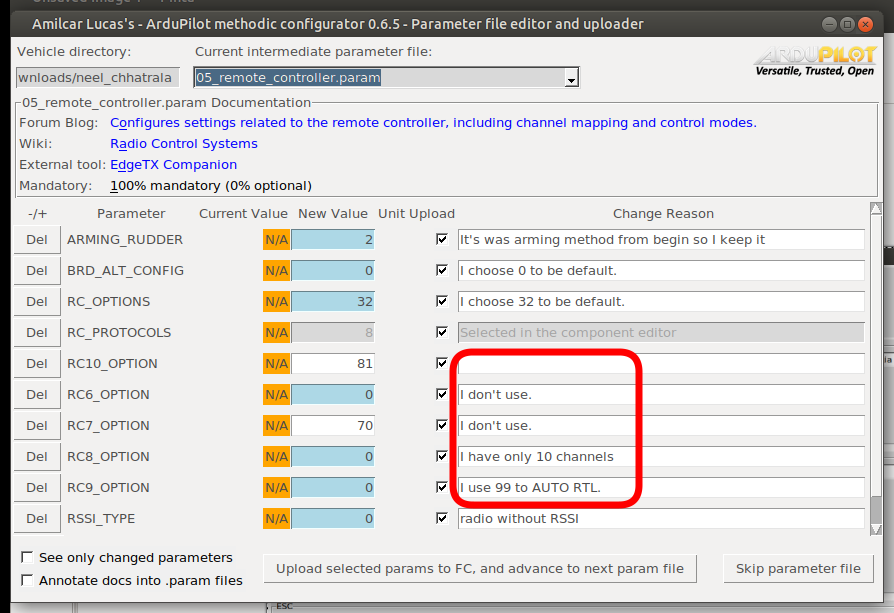
In the component editor window, edit ALL values to match your vehicle. Save the file.
Zip it all, and send them to me.
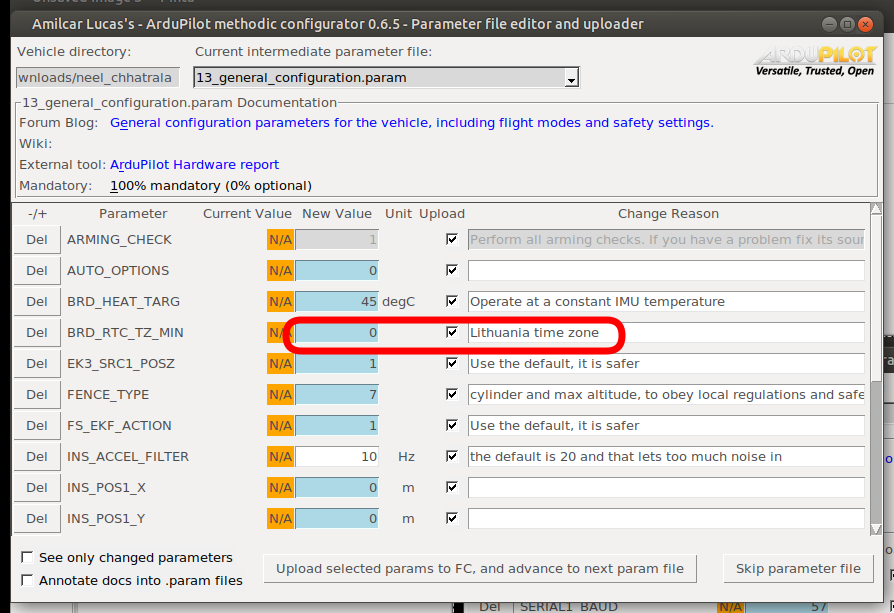
So you operate in Lituania?
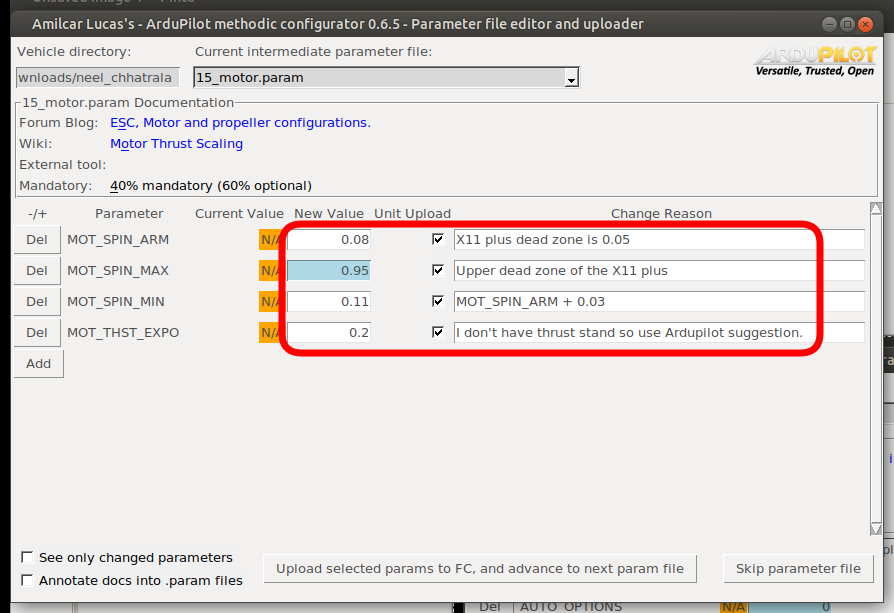
And your frame is welded?
And your T-Motor Prop is a a quality prob from Hobbywing?
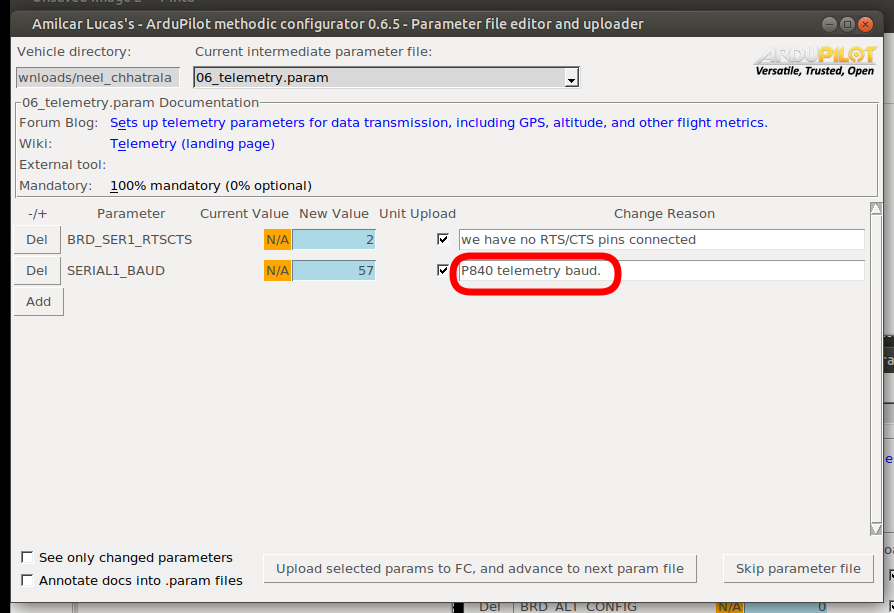
And you have a P840 modem connected to your herelink?
Sorry but this its india
Not welded its a canti lever beam design and also from t-motor only did the quality check not by us.
And its herelink only but as the protocol and baud is same i didn’t vhange it
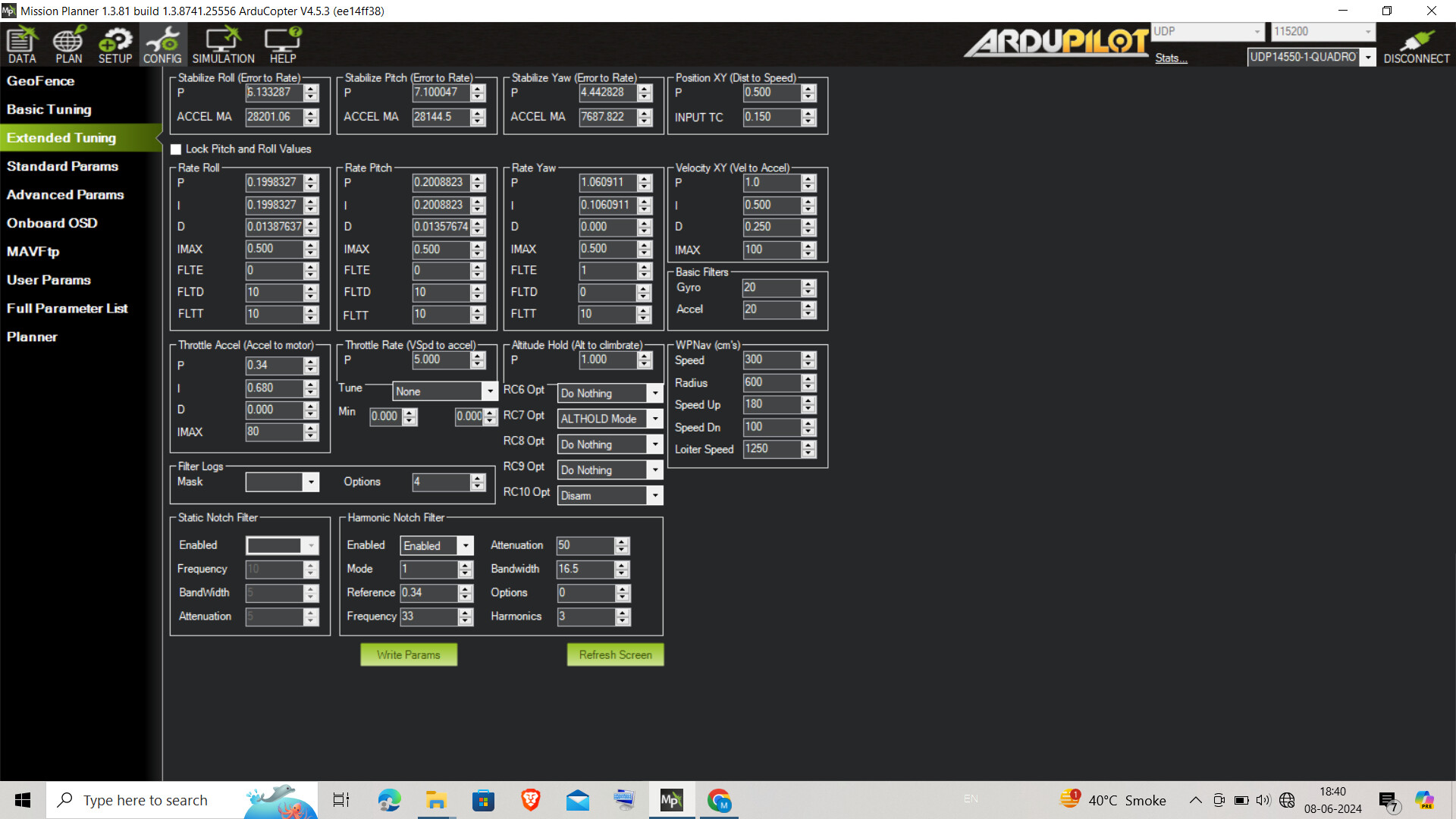
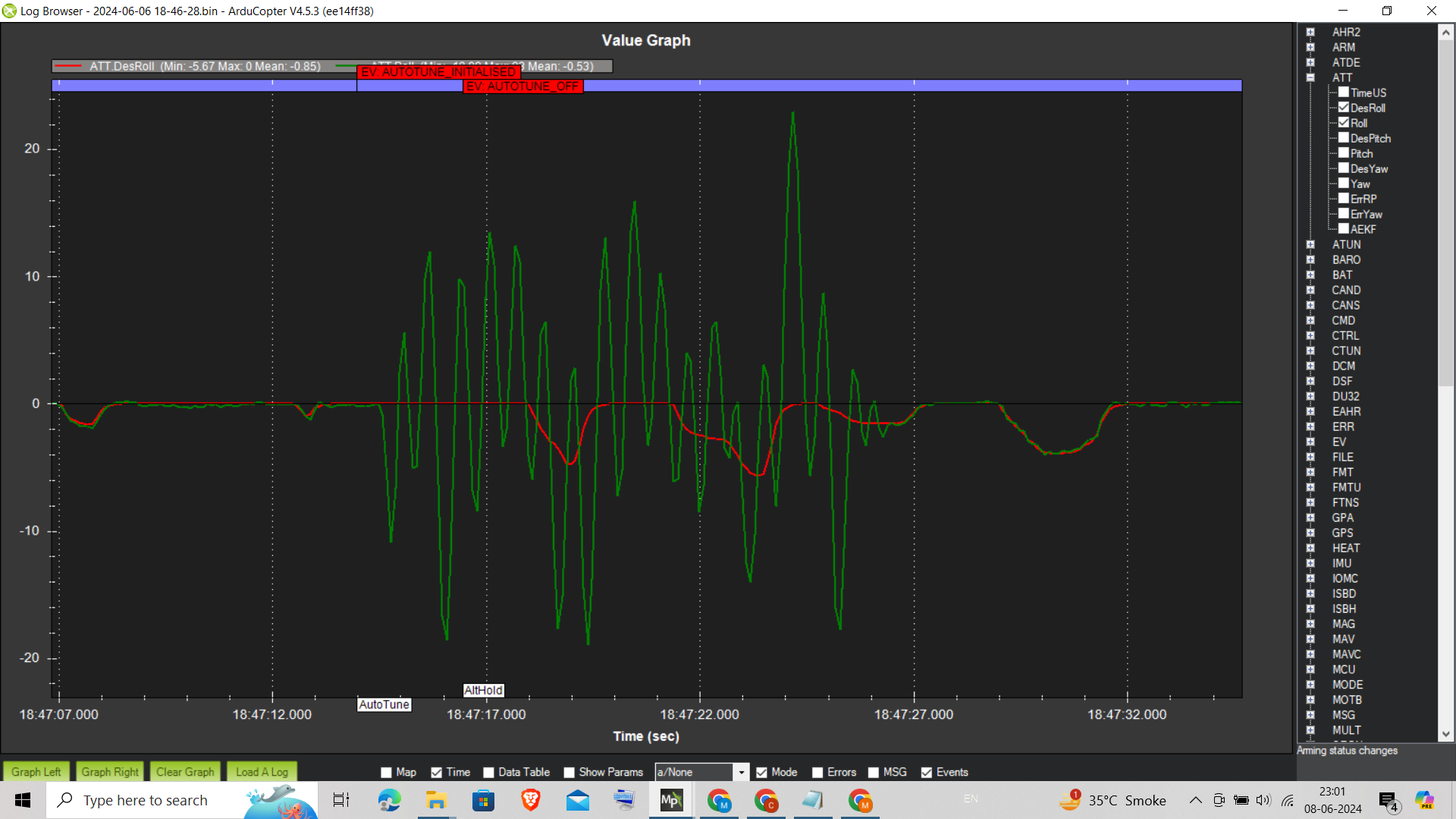
We have autotuned our Quadcopter, and after the tuning process the PID values came out to be (given below). The new PID values seems to be a bit jerky and aggressive, but the thing is it is quite accurate and follows well. So, should we consider these PID values acceptable or not? Please review the log file and tell accordingly. Since we use Mission Planner therefore, there will not be any Intermediate Param File.
I believe is very hot in India.
You did not complete the Yaw Autotune.
you repeated Roll autotune twice and successfully.
You did not do the pitch autotune, you may have reused the previous tune, not sure. you can try to copy the Roll tunned value to the pitch and do a pitch autotune, AUTOTUNE_AXES,2
any reason why you set INS_log_BAT_MASK to 3 and not 7?
I believe ATC_THR_Mix_MAN can be set to 0.5, because UA has learned the MOT_THST_HOVER value.
You have not updated the PSC_ACCZ_P and I.
interestingly, you have set LOG_FILE_DSRMROT,1, and yet you get one big bin file and not three separate bin files.
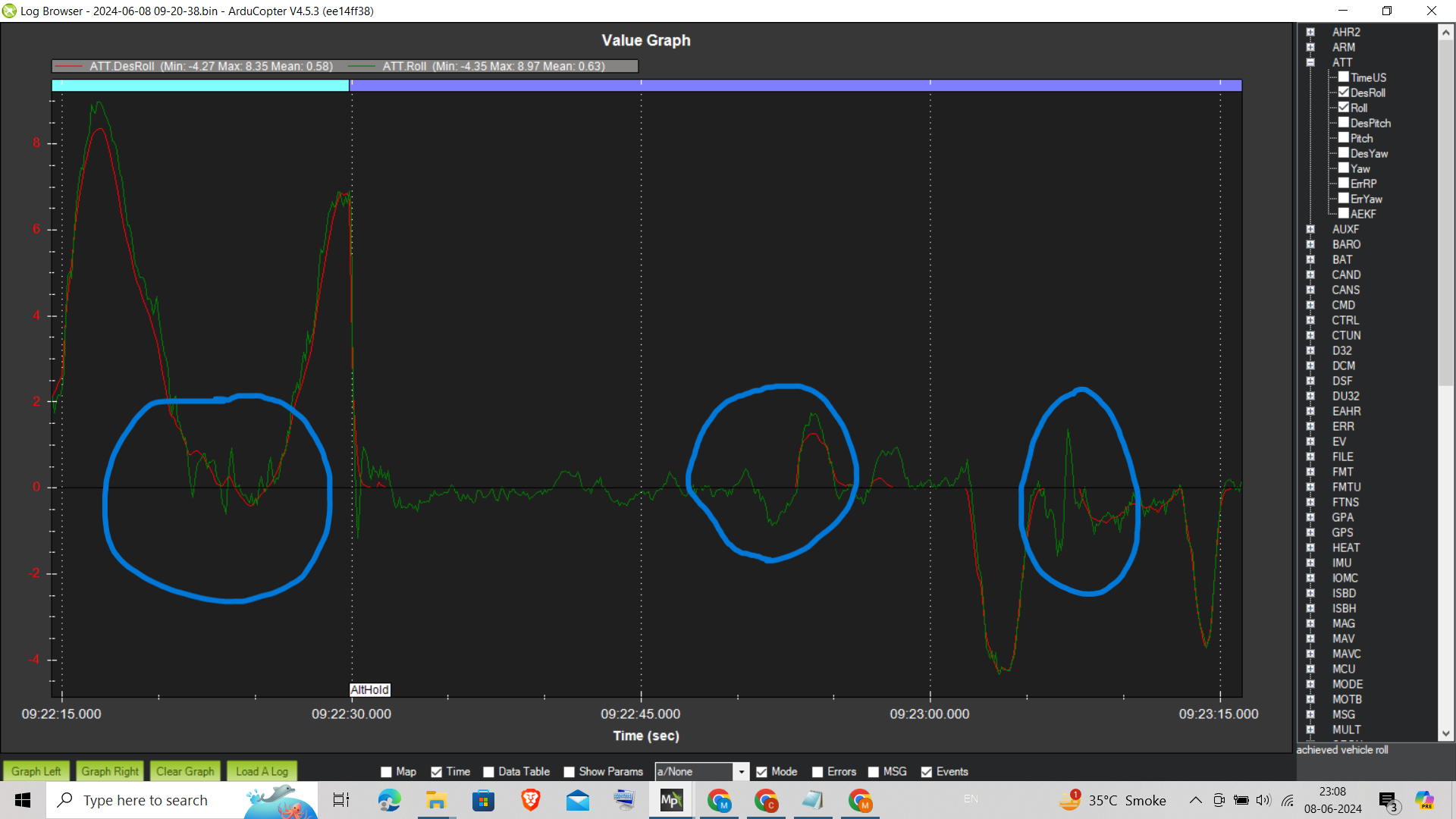
I used T-MOTOR antigravity mn8014 100kv motor with mf3016 inch propeller and
T-MOTOR flame 80A V2 ESC with 12s 22000mAh solid state battery, now as you said to tune all the three axis, I tunned it and later after observing the flight in Auto mode, roll followed the inputs but slightly wobbled as per the graphs shown below. So just to make roll a bit better I again autotuned roll but this time the wobbling were so drastic and aggressive even in normal wind conditions that
our drone almost crashed.
Though setting
PSC_ACCZ_P 0.34
PSC_ACCZ_I 0.68
in ALTHOD, POSHOLD and AUTO modes
Please look through the screenshots of the graphs and PID value and tell the further course of action?
I performed the new wind speed estimation according to the new B COEFF_X and Y suggested by yourself, After observing some test flights I found out that the drone still wobbles. Please help me to find out the new EK3_DRAG_MCOEFF.
I looked at the file you provided, and here are the results:
file 02 was still wrong. You will need to redo IMU temperature calibration (03) after uploading that one.
file 08 was still wrong, You will need to re-upload the new version
file 10 was also wrong, You will nee to re-upload the new version, but do de-select the “upload” checkbox for the two CAN_D1_PROTOCOL and CAN_P1_DRIVER parameters first.
file 13 was also wrong. You will need to re-upload the new version
file 14. was also wrong. You will need to re-upload the new version
After that you need to start on file 22.
Why have you skipped to file 40 without doing files 22 to 39?