Do you think it is because you are using GPS for height issues?
EK3_SRC1_POSZ,3
how do you derive the MOT_THST_EXPO,0.2? Are you using Alpha ESCs?
PSC_ACCZ_P,0.5, you should set to MOT_THST_HOVER.
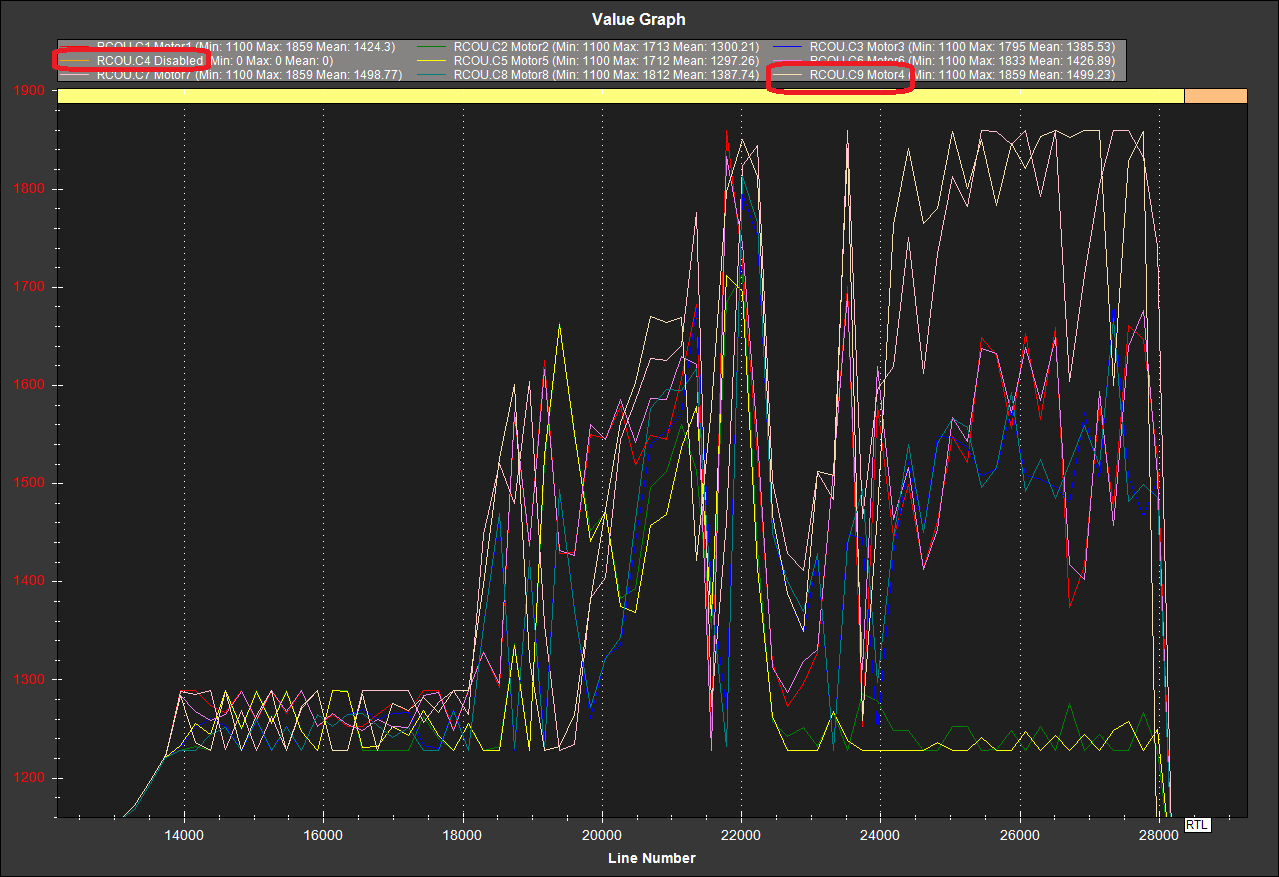
why is SERVO9_FUNCTION,36 == motor 4?
AHRS_ORIENTATION,8, Roll180, double check.
LOIT_BRK_DELAY,1, I suggest going lower.
there is a recommended way. I used a Lua script with an RC button to select before arm and it also updated the Z-CG.