Hi Greg: Thanks i should of said to you i did try that several times and when i do i only get 4 sensors that show up even after i wait 5+ min the RSSI,RxBt,TQly and the TRSS heck i even switched yaapu converters the ones i had bought not the ones i made and then thinking the MP displays good telem it’s not the FC it has to be the Rx so i even swapped them and today i think i’ll make a new SD card and setup Flight deck to see if that works when i get back from walmart (Wife needs 2 week supplies lol) OK Greg thanks again.B.K
Perhaps reading the Telemetry sensors discovery page in the Yaapu Wiki will help. I would post your issue for one radio and let Alex help…he’s seen it all.
Hey Greg:I found the problem( voltage sensor) i had 4 bad ones and i took one off one of my X8 octo and tried that and it worked, I should of just plugged the converter into the Pix& the Rx first without the voltage sensor. Thanks just giving ya a update.B.K
Has anyone experienced a strong induced yaw in fbwa mode due to the motors? We had our first flight with a similar setup and it oscillated quite a bit. You could hear the motors spin up and down as it oscillated.
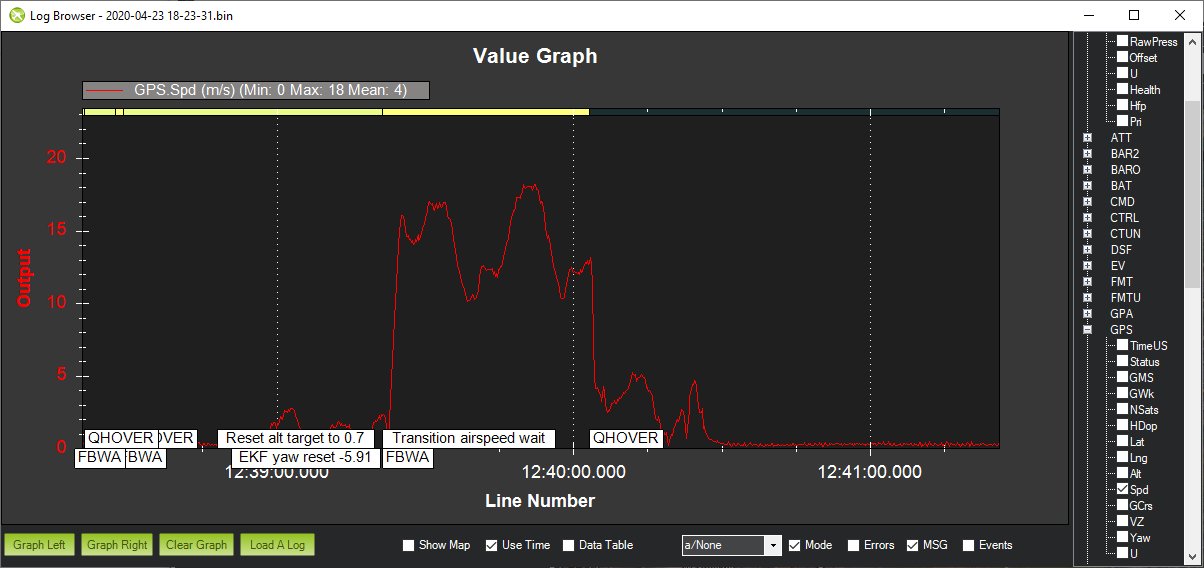
Perhaps you are triggering one of the Q_ASSIST_ parameters. If you could post a log (.bin file), that would be best.
I found your log by chance in your thread on the ArduPlane forum. I don’t normally go there.
Your speed was too low and you never completed the transition cycle so the copter mode was still providing yaw control. Either fly the plane faster or lower the ARSPD_FBW_MIN setting to maybe 9 or 10.
ARSPD_FBW_MAX,22
ARSPD_FBW_MIN,13
Yes this is something we’re discussing too! Very kind of you to go through the log. We’re aiming at a new test within a week, I’ll report back our findings!
Hi guys, I really enjoy the conversation in this forum.
I want to ask about ESC Calibration Procedure (https://ardupilot.org/plane/docs/quadplane-esc-calibration.html).
Im trying to calibrate my ESCs for my Nimbus VTOL Grey 2.
I have two ESC (Xrotor 50A) for the front motors and another ESC (Xrotor 40A) for the back motor.
-
Should I make the calibration one by one motor OR all motors at the same time?
-
Also there are two modes of operation available, the ESC_CAL_1 and ESC_CAL_2. Do I have to calibrate both OR only Q_ESC_CAL_1?
Thank you
Hi Petrou,
Sometimes one technique will work better for you than another. Make sure to heed the warnings on the ESC Calibration page.
I use Q_ESC_CAL=1 as follows:
For Step 2: “power up just the flight board and not your motors.”
Plug into the Pixhawk via USB cable to power up and connect via Mission Planner…then set the Q_ESC_CAL=1 via Mission Planner.
Follow remaining steps using the battery to power up ESCs with armed throttle high.
Sometimes you cannot hear all the ESCs making their initial “throttle high” noise so only wait a few seconds before setting the throttle stick low. You will immediately see if all motors start up at once (using your throttle stick) or if the process needs to be repeated.
Remember to set Q_ESC_CAL back to zero if the calibration has been successful. This can be done safely by again using the USB to power the Pixhawk.
1 Like
Thank you @GregCovey,
I follow your advice and I calibrate all ESCs at the same time. They now start and stop at the same time.
1 Like
I’m trying to install my new digital speedometer from Foxtech.
I connect it on an I2C splitter with the compass.
Here are my settings on QGC:
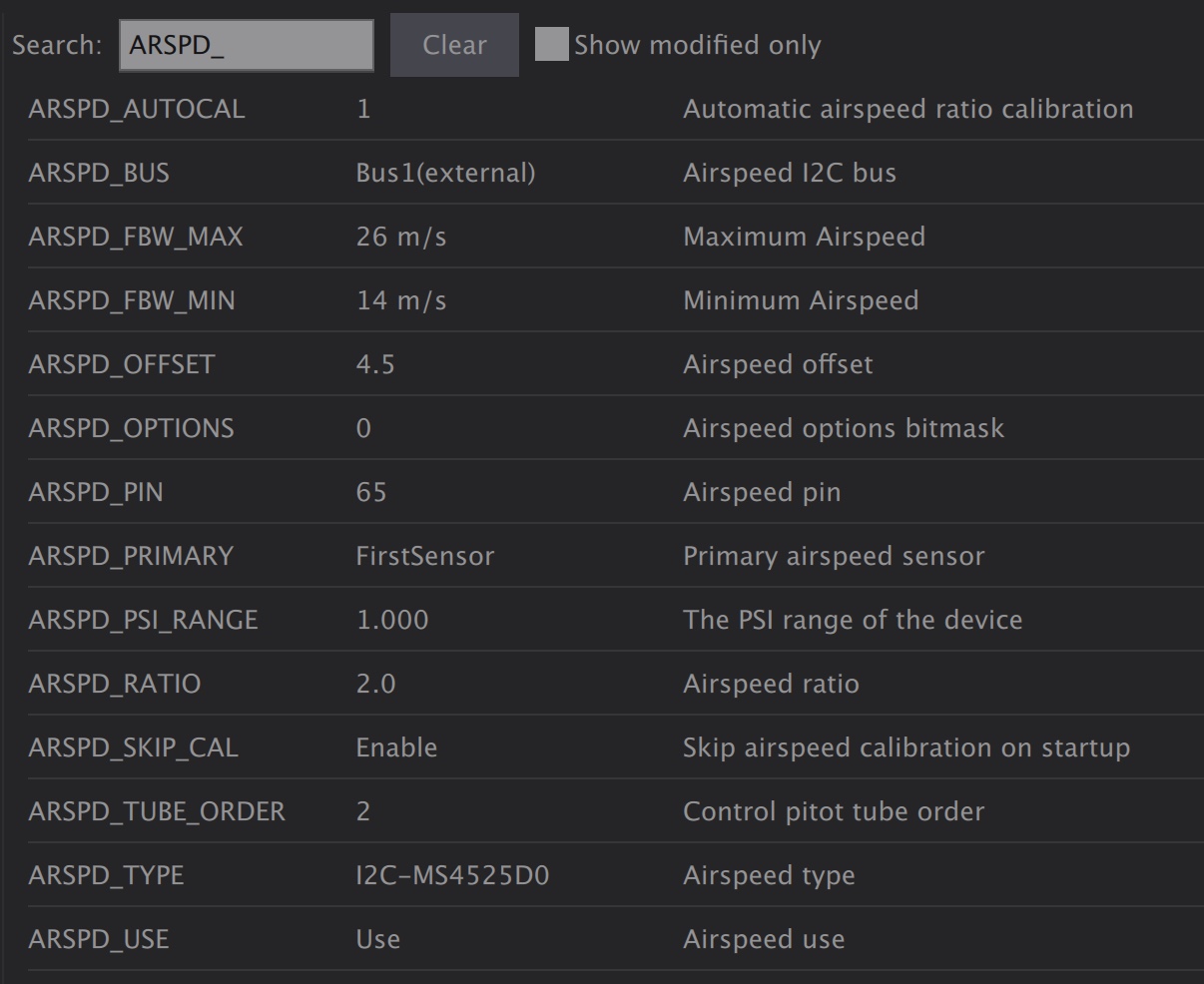
I try to calibrate it but it’s not proceed to finish calibration.
Also I don’t see any data related to airspeed on the interface and I didn’t get any error message about speedometer health.
Has anyone experienced such issue?
Thank you
Disable ARSPD_SKIP_CAL. Only the SDP33 has its own internal calibration so you need to calibrate your MS4525D0 unit on startup.
1 Like
Hi guys,
I’m doing last checks before my first test flight.
I notice a strange behavior of my titling servos.
While I change flight modes(QHOVER, QLOITER, CRUISE, FBWA) works as expected.
After I disarm and disconnect from battery the one servo remain up and other One is falling down. I attach the following video of this issue.
I don’t know if there is a problem of my settings or something wrong with servos.
Your advice is important for me. I want to make sure everything works as expected before my first flight.
It shouldn’t be a problem. The servos can often act differently depending upon their location. One motor may be slightly forward and the other straight up.
Good luck!
1 Like
Hi Greg: Well i’m back in the keystone state, i have contacted my old club i used to belong to and i was surprised to find out they still use the same flying field near saltsburg wow 30 yrs under our gov the just opened us to yellow so pretty soon i’ll be able to maybe fly how ever i’m still not able to get a GPS in telemetry to be able to use the. yaapu script. ok here’s wishing you and the family Covd 19 free and better weather than we have here. B.K
1 Like
Hi Butch,
We have good weather in upstate NY this week so I plan to try some flying on Friday. I will test my MFE Freeman VTOL for the first time. It’s hard to believe that Memorial Day weekend is coming up!
For the GPS issue, first see that GPS is detected in Mission Planner. You can use the USB cable or the 3DR telemetry link. If not, then you have a hardware or setup issue.
If MP works but not the FrSky telemetry for GPS, then try posting a question on the Yaapu Telemetry thread. Add your version numbers to the post.
Good luck and fly safe!
1 Like
Hi guys,
Hope your flights go well.
I want to buy a 3axis gimbal and camera to use with my Nimbus, but prices are too high.
At first, I focus at a Tarot T4-3D which is quite cheap and I was planning to buy also a used GoPro camera. But after some research, I realise that with GoPro cameras can’t zoom during flight. I need camera to zoom at least X10 during flight.
Has anyone any suggestion about 3-Axis gimbals and cameras at an affordable price that can be used with Pixhawk 2.4.8? Also i use QGC.
Thank you
Petrou,
You have conflicting goals; zoom camera and affordable price.
The best you can probably do is a 10x optical zoom like this Tarot Peeper Camera at FoxTechFPV. Another similar one is here.
Cheers!
1 Like
Hi all.
First time poster and I am about to purchase my first UAV a mapping VTOL (diving in the deep end) and am probably going to go with the foxtech Nimbus as they are RTF and should help me get acquainted while also using mostly standard components that offer flexibility for re-configuring once I am ready.
I don’t know much about Radio Controllers but have reservations about the ones that come with Foxtech builds.
Either:
- T12 12-Channel Radio Controller (https://www.foxtechfpv.com/t12-12-channel-radio-controller.html) or
- Foxtech DA16S+ 16-Channel Radio Controller https://www.alibaba.com/product-detail/DA16S-Long-Distance-16-Channel-Model_60803631856.html?spm=a2700.galleryofferlist.0.0.599a142b9Z4sv0
My main use for the VTOL is mapping, so autopilot missions.
I had hoped to use a more universal controller like a Taranis.
Has anyone had experience with either of the controllers above?
What features will I be forgoing/adding with these versus a Taranis or other controller?
Any advice is much appreciated.
Thanks,
Dan
Hi Dan,
Welcome to the Nimbus thread and APM VTOL Plane forum!
Both of those systems are meant for long-range mapping that integrate the radio link and data link into one RF signal. The T12 is a Skydroid system. You can read more about it in the main Skydroid thread. I have the older M12 system that doesn’t have a built-in camera link. It works well. I use it on my Tarot 680 Pro hexacopter because it has the mini gimbal controller on the transmitter to control my pitch and yaw on the hexcopter gimbal. You don’t need this gimbal function for mapping since a gimbal is seldom used in that application.
I don’t know anything about the DA16 system. Once you pick a system, I have found that using other systems can be disorienting. My Skydroid M12 has labels on all the switches because all my other VTOLs, copters, and planes use either the Horus X10 or the Taranis X9D+ as they are similar.
One feature that may be different between these data radio systems and the FrSky systems is the 6-position knob used for selecting one of 6 flight modes in APM. My Skydroid M12 has a 3-position toggle switch for modes and a 4th mode can be assigned to a secondary switch. I don’t think Plane has this feature like we got used to in Copter.
Good luck!