I’m also new to UAVs. I’m using Herelink for controlling my Nimbus Grey 2.
It has QGC and Solex installed which are very helpful and much easier from Mission Planner.
Also the airunit it’s very lightweight and has also two antennas with a maximum range of 20km. You can control the UAV and receive HD video at the same time. You don’t need another module for video.
Also it is very easy to install it. Just 2 cables from airunit to your Pixhawk.
Today I make my first flight.
I take off my Nimbus in QLOITER mode and was looking good. It was very steady and was listening accurately to movements of Herelink.
I increase elevation to 40meters above ground and i switch to “CRUISE” flight.
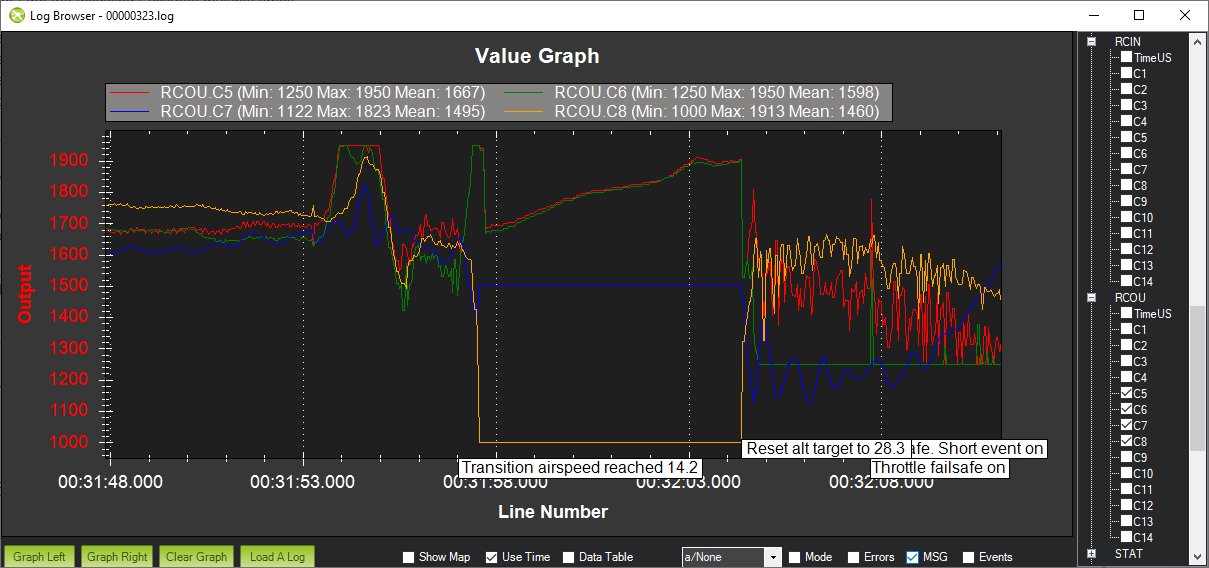
During flight I get the following Failsafes multiple times:
Failsafe Long Event on: type2 / reason = 3.
Failsafe Long Event on: type1 / reason = 3.
Failsafe Long event off: type 3/ reason = 5.
Throttle Failsafe On.
After Failsafe, I try to switch to QLOITER and after to RTL but the Nimbus was switch automatically to LAND. I attach my Log file here.
Im trying to find out what was the problem…
Any advice @GregCovey?
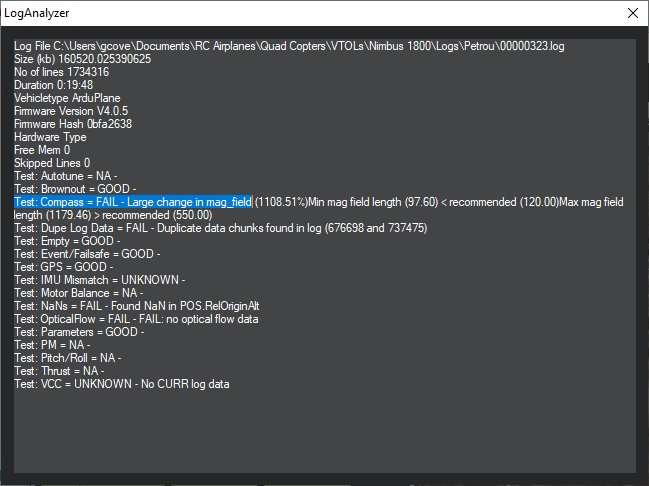
I would not recommend using CRUISE mode or RTL mode on your first flight. Simply use QLOITER and FBWA so that you have more control over the flight. I didn’t see any voltage, current, or AS sensor data in the log.
The Auto Analysis pointed out some large compass change. I’m not sure if that is really an issue.
Once you get into those automated modes like RTL and LAND, I have seen a cascade of bad things happen if you try to switch out again.
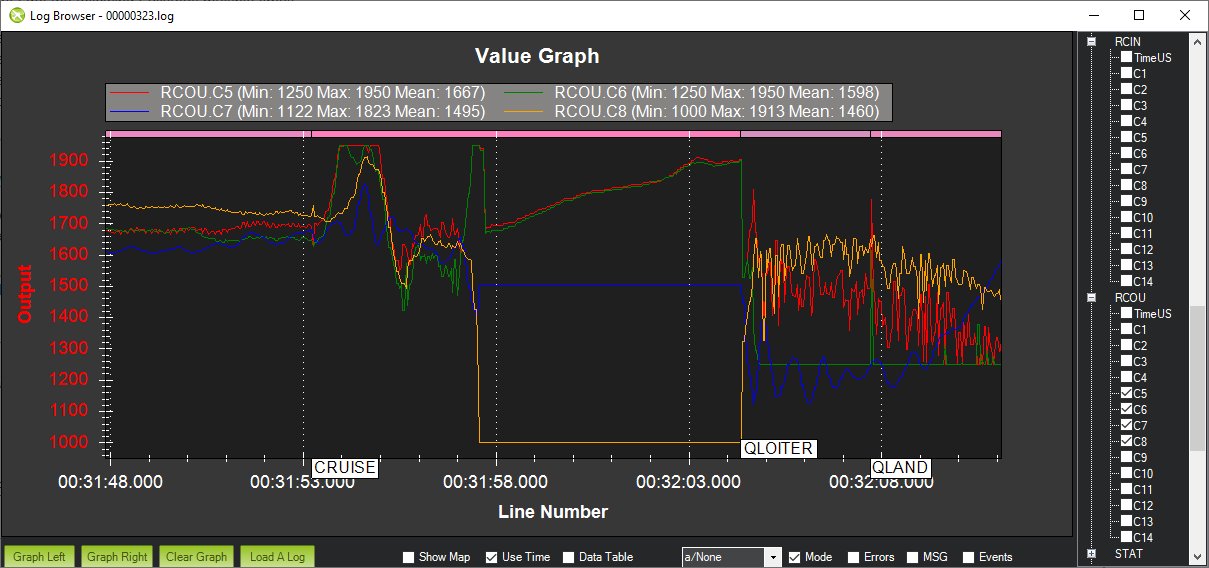
You have the following settings in the .param file but I could not properly graph the throttle input. Perhaps the Herelink does something different so you could post your failsafe issue on that thread. Once you were in CRUISE mode, it looked to be flying fine.
Yes, this particular failsafe was from the loss of radio signal so the throttle value went below 950. However, I wasn’t able to graph the scenario so I am not sure what was going on. I know the Herelink does both R/C control and APM telemetry in a single link. It just didn’t graph properly.
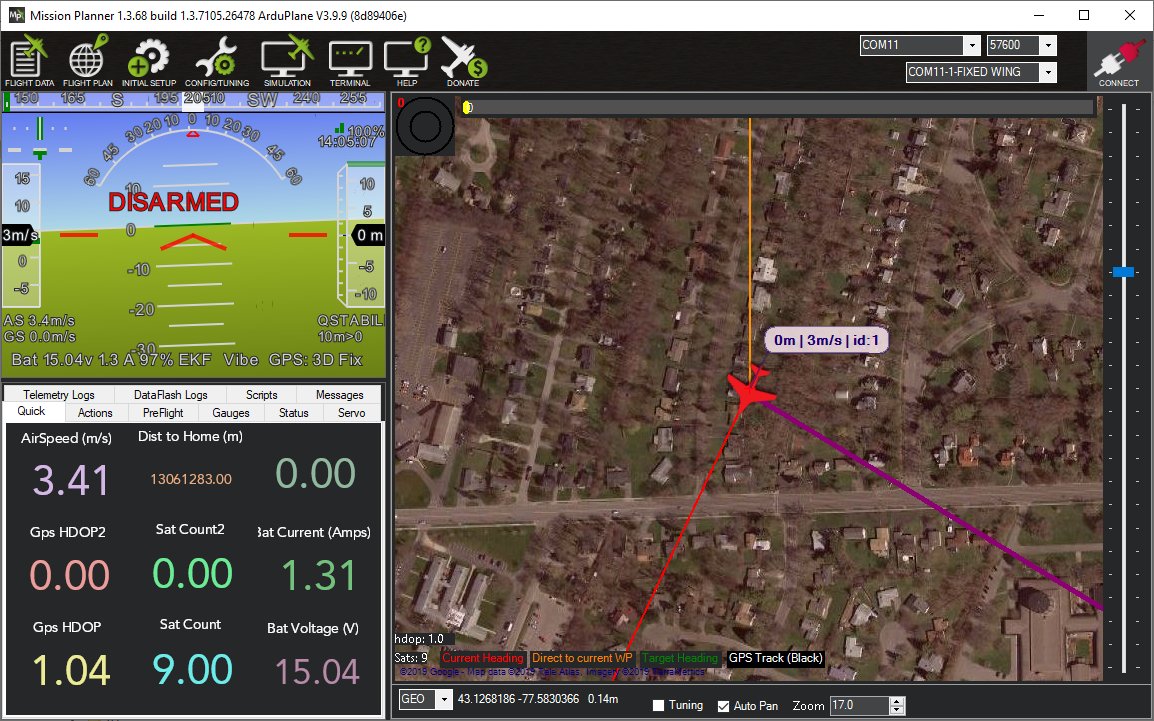
It was working fine during QLOITER and CRUISE modes before it went bad so I don’t suspect a bad cable. A low battery warning would give a different failsafe message. Unfortunately, I could not graph either voltage or current. Are you using a Mauch Power Module?
I can see my voltage and the current. When my battery is full the voltage is 25 volts.
At battery calibration, I was measure 1.5Α and proceed with that value.
The amperes at the time of sensors calibration was at a range of 0.7-1.5A. I don’t know if this is correct…
About my logs, I have no idea why voltage and current didn’t graph and I’m trying to figure out why…
Hi GregCovey: Here’s hoping you and the Family are doing Great and your getting some decent flying weather.I am trying to figure out how or if i can put different flying field Maps on the yaapu script so i won’t have to bring my computer so i wouldn’t have to use it to down load the maps and install them on the yaapu telem script every time i go to a different flying location, So do you know if this is possible ?,
Thanks B.K
Thanks for the well wishes! The weather was good and then we had a hot and humid spell that makes flying no fun. Today we finally cooled down but have plenty of wind. It’s always something, right?
You can have multiple map locations on the Yaapu telemetry by simply adding more images to the flash card directory where you put your original images. The images have the GPS data encoded into them so if one matches your plane location, it gets displayed. Simple.
I also use my Galaxy Tab A with a 3DR telemetry link and QGC. It beats hauling my heavier laptop around but I am not as comfortable using QGC as I am using Mission Planner. Need more practice.
Hello all, I have been using all the work you have put in to try to build a Nimbus VTOL of my own. The wiring is pretty much complete and now I am at the fun part of trying to make the parameters match what the plane needs to do in order to fly. I wanted to say thank you for all the information shared over the years and to introduce myself, as I imagine I will have some questions in the near future.
I flew mine about a month ago for several flights as we are in partial quarantine in upstate NY. It still flew great! I’m not aware of any upgrades other than buying some FoxTech add-ons.
Hi Greg,
Quick shout out and care from AUS. I’ve read this thread top to bottom over several days after I committed to buying a Nimbus v2 from Foxtech (actually BNIB from another operator). I must say I have become increasingly reassurred as the thread progressed .I’m trying to upgrade to the latest ardupilot plane 4.0.5 but am missing the new parameter list from foxtech with the fail safes added - my reason for the upgrade.
I was wondering if it has been posted anywhere?
Welcome to our rather long Nimbus VTOL thread. I don’t use the failsafes but I do have some suggestions. Try e-mailng FoxTech about the failsafe parameters. It is possible that the parameter names have changed over the latest releases in Arduplane. I am not aware of any recent .param files posted from FoxTech so perhaps another member has better information for you. A few of them have purchased Nimbus VTOLs from FoxTech.
Thanks Greg for the support you have provided everyone I have learnt heaps.
I have found foxtech pretty good - I annoy them enough- Doris recodnises who I am LOL. They did send through their apj and new parameters to go with it. There where so many changes and about 37 lines of new parameters. I used an updating video from foxtech on youtube that caught them of guard - they asked me to send them the link… wait out.