I’m with you on all of your comments - I have an X21 which looks like a speck at 300 metres.
In respect of the RTL setting when the voltage gets down to, say 20 volts, The setting in APM Planner 2 offer 0 - 65535, which seems to come from 16 bit computing. Do you know how I would correctly interpret that into voltage?
There seems to be no reason Mission Planner won’t work for you and its what you want to use for Ardupilot configuration. The only good reasons to use APM Planner IMO is if you are on a Mac or Linux or if you want the comprehensive log plotting funtions it offers. I use it for this purpose frequently.
The reason appear to be that the initial process in Mission Planner (Install Firmware) is unable to detect the board version whereas APM Planner 2 appear to have no difficulties. I am running Windows 10, fully patched and have used several USB cables, attempting to connect with and without the main battery installed and connected (though the Autopilot board appears to take its power from the USB cable.
If APMP2 works for me in the field then that will be just fine.
After that I’ll be testing some Android apps (as I would prefer to carry my Android Tablet than a laptop into the field) and then trying to fit autopilot to something like a TrainStar.
On the Nova Aperture (IdeaFly Storm 800) Mission Planner was corrupting the flight controller in some manner to the extent that I was unable even to arm the copter.
APM Planner 2, however, enabled me properly to set up the flight controller and reconfigure position 4 on the rotary switch of the Quanum i8 to fly in Auto mode.
I took the copter to the flying ground and finally got it airborne in Stabilize mode, switched to Altitude Hold to get a good feel for the copter (it flew beautifully), landed it it both manually and by flipping for RTL mode and set out on my auto mission, keeping the copter generally within 50 to 100 yards. It flew perfectly and I ran the mission several times. It even brought down the landing gear automatically.
I then flew out using altitude hold for a couple of hundred yards, tested circle mode then switched to RTL, all without issue.
AND NOW THE BAD NEWS
Finally (and I use the term in its literal sense) I practised some manual flying at a 50 yard radius before issuing an RTL command. All was going well until the copter was eight to ten feet in altitude during its landing whereupon it simply dropped out of the sky, snapping off three of the rotor arms.
The rotor arms appear to be intact but where they plug into the main fuselage, the fuselage mounts have sheered off, as has the wiring in a couple of instances.
The battery is intact and shows around 21v so I would eliminate that as a possible cause.
I guess that when a drone fails it assumes the flight characteristics of a house brick whereas with fixed wing one can at least use its glide characteristics.
Maybe I’ll try an H-King Trainstar and fit an autopilot to that.
The battery showing 21v means it would have been below 20v in flight.Should be ok with a Multisag but it’s getting low.Dropping out of the sky is either a power failure or an unexpected mode change with the throttle down.The log is a must.And spares could be available.Worth checking as they hit BG and the like in numbers.
Sadly, the copter hit the ground on the rear, right side and all of the rotor arms on the right side sheared off and the USB port was damaged by the battery hatch door which was forced across and into the port. The rear, right portion of the landing gear was also sheared behind the central joint.
The physical evidence suggests a failure of the rear, right rotor motor during the RTL landing procedure.
The green lights at the rear were steady.
The rear, right rotor mount into the fuselage is not only sheared off but has been ripped from the wiring. The other two right rotor mounts have been ripped from the fuselage.
The only good parts of this are that I was the only person in the field so nobody was hit, the copter was performing an automated (RTL) landing so was at low altitude when it failed.
As I’m relatively unfamiliar with APM Planner 2, if I am able to access the USB port on the flight controller what should I be looking for in the software that reports flight data?
Thanks again, all for your generous assistance.
I’ve already ordered a Trainstar (and a new Bix3 fuselage) with a view to installing a flight controller in it to try flying missions on a fixed wing. Any recommendations as to flight controller?
It’s years since I used Planner but you’re looking for dataflash logs.As it’s a Pixhawk inside it should have a good logging level.Maybe.Should be dated in the log download screen so easy to zero in on the last log.You want the .bin log and will probably have to zip it up or host it remotely to post it.Looks like you have to use terminal.This may or may not help.
I received an interesting response from Hobby King. They state that they “accept no responsibility for crash damage and/or loss of kits, engines, accessories, etc. incurred during operation of a radio-controlled model. In most cases it is very difficult or impossible to determine whether crash damage was actually due to radio equipment failure or to operator error.”
I have a problem with this because the copter was, in fact, operating itself via the RTL function. I would liken the problem to a brand new car being sold with a defective big end bearing which failed twenty minutes into its first trip, causing catastrophic damage to the engine and then causing a collision which wrote off the vehicle.
Prior to taking the copter out I made extensive inquiries to ensure that, so far as is possible, I eliminated all risks relating to operator error including, at all times, using the inbuilt RTL to ensure a safe and controlled landing.
Use the Flight Controller from your crashed copter. Of if that is suspect buy another PIxhawk. If space is at a premium look at PixRacer. Personally I have an old APM in a Wing and it performs pretty well for what it is.
By way of an update, you are aware that Hobby King summarily dismissed my request for a return and refund on the basis that the copter crashed. However, the copter was under the full control of its internal flight controller performing a controlled landing so the fault must lie with the machine and not with me. Like all RC model flyers I have crashed my fair share including my five other drones (none of which proved terminal); such is the nature of the hobby, but this incident was a failure of the machine and not its operator.
I have now regained access to the flight controller USB port and find it to be extremely revealing.
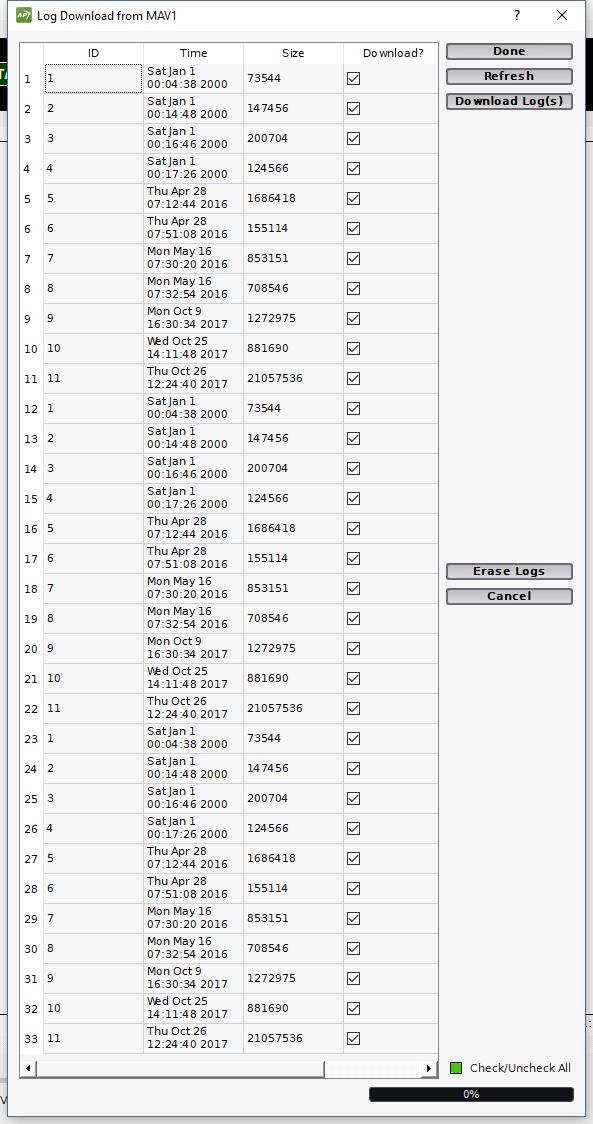
Under the Graphs button is the facility to download log files.
Please bear in mind that my wife purchased this for me for our 24th wedding anniversary (22nd October 2017) and then note that the log file contains items dating back to the year 2000.
Please note also that any attempt to download one or more of the 33 log files results in APM Planner 2 crashing giving the following error screen:
So this leaves me a little bit stuck.
I am minded to contact the credit card company with a view to seeking restitution. Have any of you had to to take this route and, if so, are you able to offer any guidance from your own experience?
I’ve always found Hobbyking to be fair.If you give them the evidence they cough.So you need to get the crash log out of it and let an expert like James scan it for mechanical failure.I’m sure they’d accept that evidence should it exist.
APM Planner crashes when I try to download logs also. I know you have said Mission Planner does not work for you which is odd but try QGroundControl to download the log of the crash and then use Mission Planner or APM Planner to review it (or post it here) after doing so.
I’ve bought quite a lot of stuff from Hobby King (indeed, I am awaiting several current orders to be delivered) however their response in unacceptable.
I have regained access to the flight controller, as I have a little IT experience (since 1972) and, at this stage, it appears that the controller cannot fully communicate with APM2.
I have invoked S75, Consumer Credit Act with the Credit Card Company, as they a jointly liable when goods sold are faulty, not of merchantable quality or unfit for purpose and, at this stage, it looks certain that the goods meet all three of these criteria.
I’ve no wish to impose on anyone (other than seeking information and/or assistance from the forum) but if there exists specific expertise that can enable me to prove my case (if this is required) then I’m more than happy to have a dialogue.
APM Planner does download logs from the old APM flight controller but there seems to be a problem with Pixhawks and Pixhawk variants. It crashes downloading logs from my PixRacers. IMO the only good use for APM Planner if you are on Windows is for log graphing and analysis. The way it handles multiple Y-axis data is superior to MP.
It occurred to me that there ma be an issue if the flight controller was not where the USB port to the flight controller was located (i.e. there was a connecting wire. So I dismantled the remains of the fuselage and found my thought to be accurate. The flight controller is connected by a cable to the USB port on the copter.
So I have now removed the flight controller and here it is:
Other than those 5 connectors stuck across the top it looks like a generic Pixhawk FC. Those logs contain little of value. Even the Parameters are incomplete. If they were complete logs chances are they would be too large to attache directly here which was the 1st clue something is wrong.