Whilst installed within the copter (see earlier post) APM2 showed 33 log files - a 270K one related to the flight in question. The problem was that I couldn’t download those files. So I opened up the copter and noted that the controller contains a micro SD card but I could not get to its USB port on the side because it was up against the battery firewall (a carbon fibre box). There being no battery in the copter and the fact that the controller would take power from the USB cable attached to my PC I left the micro SD where it was and removed the controller (as you have observed). Sadly, on firing up the controller via USB and APM2, APM2 showed only the log file from that connection today (i.e. the file was created when the USB cable was connected. A right, proper Horlicks!
Remove the SD card and read and copy the logs from it directly if you have the means to do so. Also try Mission Planner again with a direct USB connection to the FC as you are doing.
Okay…
I have removed the micro SD card (a generally highly reliable Kingston data card) from the flight controller, zipped up the files, uploaded them to one of my domains where they are available as APM.zip for download.
The size of the zip file is 13MB but I note that a log file dated 26th October has an unzipped size of 20MB and there are other large files.
The files may be downloaded from:
As I have a copy of the downloaded file I see no reason not to clear the card and then try to get the flight controller running in Mission Planner, now that it is stand alone, for use within an fixed wing aircraft.
Thanks again for all of your help.
Still will not function with Mission Planner so I will use APM Planner 2.
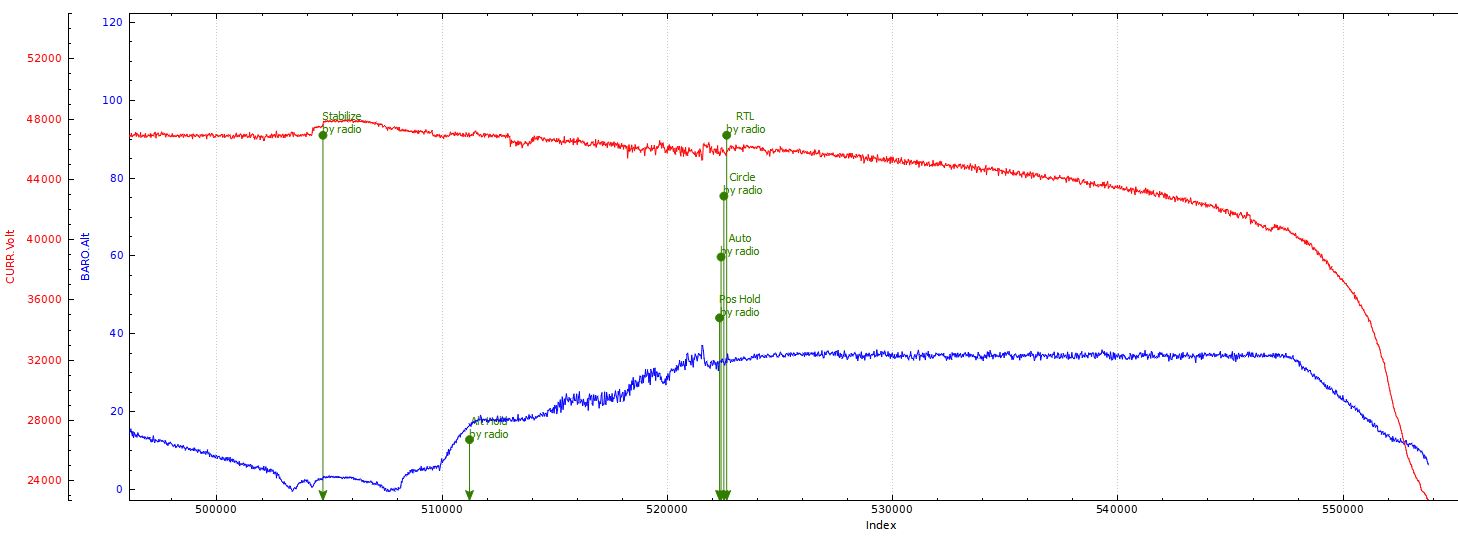
It looks to me like you simply ran the battery down to nothing. The battery failsafe is set to 19.5V but unfortunately the power module, or whatever you have in that craft giving battery voltage, was not calibrated. About the time the craft starts losing altitude the indicated battery voltage is dropping precipitously. The actual value shown for battery voltage is incorrect but you can tell by the trend what’s happening. Also the vibration on the craft was very high with some severe clipping shown. I suppose from unbalanced props but not sure. Sometimes its how the FC is mounted or otherwise constrained by cabling. Not that this matter now…
At this point I would attempt to install current stable Arduplane for your new project from QGroundControl and then see if Mission planner will connect.
Edit: The possible cause of the battery voltage not being calibrated is because the battery voltage multiplier (BAT_VOLT_MULT) is out of the ball park compared to any range that I have seen.
Hi Dave
Thanks for taking the time and effort on this.
Supposedly, the indicator lights at the rear of the copter should change from solid to flashing if the battery level is getting low and, in any event, if the level had dropped to 19.5v RTL was programmed to be invoked. It appears that if the battery level fell to a critical level that the LEDs would have gone from solid to flashing - which they didn’t - and at 19.5v the copter should have done an RTL, which it didn’t.
The vibration of which you speak indicate that the copter had inherent flaws. The props are the supplied carbon fibre props so one can reasonably expect them to be, at least, adequate.
In your opinion, do you feel that there is sufficient information to substantiate a conclusion that the copter was not supplied “Ready to Fly” in that it required attention of a technical nature prior to flying it?
Thanks,
Marty
Unfortunately,I don’t.I’ll bet there’s a disclamier in the ad somewhere.
Having seen the voltage anomaly that Dave pointed out I had a quick check back at the parameters.On the previous flight (I know they were short hops).In that flight your battery parameters were correct.
PARM, 34963610, BATT_MONITOR, 3
PARM, 34964651, BATT_VOLT_PIN, 2
PARM, 34965732, BATT_CURR_PIN, 3
PARM, 34966792, BATT_VOLT_MULT, 10.1
PARM, 34967837, BATT_AMP_PERVOLT, 17
PARM, 34968978, BATT_AMP_OFFSET, 0
PARM, 34970014, BATT_CAPACITY, 3300
The battery voltage would have been a bench pack I suspect.But in you long crash flight the parameters are
PARM, 54185817, BATT_MONITOR, 3
PARM, 54185838, BATT_VOLT_PIN, 2
PARM, 54185902, BATT_CURR_PIN, 3
PARM, 54185922, BATT_VOLT_MULT, 22422
PARM, 54185943, BATT_AMP_PERVOLT, 17
PARM, 54185992, BATT_AMP_OFFSET, 0
PARM, 54186072, BATT_CAPACITY, 16000
PARM, 54186098, BATT2_MONITOR, 0
So the battery capacity has been set correctly but at the same time the battery voltage multiplier has been set way off.This is why it appears to be flying on 13S batteries and also why the alarms and LEDs did not trigger.It thought it was pumping out 50+ volts.
I can only put that down to user error in the setting of parameters.I can do that because it happens to me occasionally.In Mission Planner full parameters it’s the easiest thing to do using a touchpad.I’ve no experience of APM Planner so don’t know how easy it is to do in there.But that value was changed after it left the factory and I think that means they’ve gotcha.
Marty,
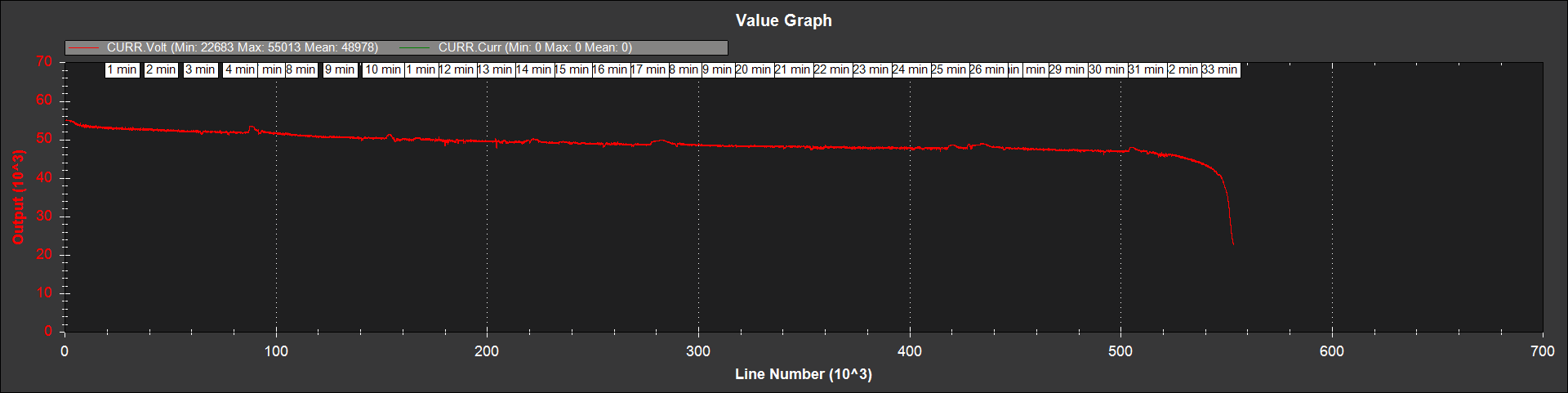
There was no way the 19.5v level was ever going to be reached with the calibration of voltage as it is set. The graph shows what is being logged as voltage in the 55,000-23,000 range, wildly off-scale due to the multiplier, and these should be units of Volts in the range of your flight battery. So obviously the 19.5 threshold was never going to be met.
As further evidence this was the cause of the crash if you look at the RCOUT’s for the motors they are being commanded to “pedal to the metal” as the battery is dying.
Edit- Reviewing the log history that FC had Copter 3.3.2 on it for the 1st 9 logs showing one of which is presumably as you received it (9). Then on 25OCT17 log 10 shows it’s been updated to 3.4.6. Where those logs from 2016 and earlier came from is anyone’s guess but you can’t make a jump that large in firmware Rev w/o calibrating everything including the Battery Monitor settings.
Again, thank you both for your assistance.
Do the 2016 logs indicate that the copter was used in flight last year? This was an off-the-shelf, RTF copter purchased on 29th September as new. If there is evidence of previous use then the copter cannot have been new could it?
I have neither knowledge nor understanding of the inner workings of the controller or the PC software so I can only see your conclusions as through a glass darkly.
My initial attempts to use Mission Planner failed because it could not and cannot handshake with the controller so APM Planner 2 was installed and found to work in terms of it handshaking and, ultimately managing the copter apparently correctly (at least visually) on planned missions.
In terms of all flight modes except Auto (which I configured to the supplied Quantum i8 via APM2) I am guessing that such instructions would be from transmitter to copter - RTL was such an instruction and even lowered the landing gear irrespective of the RC switch position.
As to the battery voltage, the battery is a 6S 16t000mAh Turnigy Multi star - brand new and charged using an IMAX Pro. Being that the copter only takes a 6S battery and being that this is the biggest battery that the copter can take I would take the (perhaps simplistic) view that the copter controllers would be set such that only a 6S battery ( or smaller batteries in series - or is that in parallel - but adding up to 6S could be accepted. A 5S battery would not achieve 19.5 volts so the copter should have responded to that - if only the fact that the battery was not 6S, were such the case. A 3S is only 11.1V volts so could never achieve 19.5 volts.
The firmware was installed automatically when APM2 was installed so I cannot comment on the apparent jump in firmware versions other than to state that I used the same PC, the same software installation and the same cable. I avoid beta software of any type where I am not an expert and whilst I have developed software for 45 years none of it has been in this field of endeavour.
Obviously Hobby King provided no information of use and such information that they did supply was incorrect and their pitiful response caused me to invoke S75 CCA with a view to restitution. We’ll see how I fare with that.
Thanks again,
Marty
It’s quite normal to have a few logs on there from the factory.They run quality control checks and may even test fly it using known parameters.My Nova Pro had a few files like that including KMZ files I could look at in google earth.So not used.They are also normally really small files like yours are as they load firmware and test GPS and flight modes etc.
The battery did 33 minutes in that log.Most of it flying.That’s a lot.So it’s no surprise that it fell off the cliff.It was simply the battery voltage multiplier number that threw the monitoring off and made it dysfunctional.The low voltage alarm could not have triggered and invoked a RTL under those circumstances.With no possibility of an alarm or a failsafe occuring,and without the experience to judge a battery’s expected flight time nor fit a suppimentary low voltage alarm, there was no way you were going to land that with nothing left in the battery.But the parameter was changed only for that flight and not from the factory,where it was set up correctly.I think HK will argue user error and on the basis of those logs I’d have to agree.
The fact it was reporting 55,000 volts is due to that multiplier value but,as Dave says,it gives the basic history of the battery performance.With the correct 10.1 multiplier it would have read the correct 25.2v and it would have failsafed.
It’s not a nice feeling but it’s the way I’ve learnt.Cock this up here,miss that bit there,crash,burn,repeat.I can understand your frustration too but the fact is that,by whatever mechanics,that parameter got changed and it was a vital one.I don’t think HK can be held responsible for things they have no control over - like owners plugging it in to a computer and changing the factory loadout.I’ve always done that out of the box understanding that I was voiding the warranty.I probably always will but I build from the ground up too.
Yea Marty unfortunately for you I have to agree with Mr. Jagger here. Once the firmware was updated the feature that doomed your flight was due to the firmware update. I have never seen an Automatic firmware installation in any Ground Control Software, they all require some user interaction. Good luck with your dispute but in any case you should be able to re-purpose that FC for your new plane project.
Thanks again guys.
Because I was flipping between Mission Planner and APM2 I went through a repetitive cycle of load software, plug in USB, allow controller fully to boot, install firmware.
My last iteration was to set up on APM2 so the firmware that was installed was downloaded then uploaded to the controller. As I was going to test fly close to my physical location the only parameters I set (changed) was the RTL failsafe voltage of 19.5 volts and the Auto mode to the rotary switch - everything else was left at default settings. Perhaps my relative ignorance of the software was an issue.
As you say, you learn from your mistakes. I’ve just received a Trainstar, as I feel the need to revert to fixed wing - because they glide when all else fails and because it has the room to add a flight controller, FPV, HD Mobius-style cameras facing fore and aft and, for the moment, just get back to plain RC flying with that and my Bix3…
I’ll let you know what happens with the claim. Thanks again,
Marty
By way of an addendum I have found what appears to be a fabulous YouTube channel named RagTheNutsOff the author of which has created a step-by-step guide for all of those interested in FPV, FC and GPS autopilot.
It is a series of no fewer than 24 videos of various lengths aimed at fixed wing but applies to any RCA craft and I’m finding it most illuminating…
Cheers,
Marty