okay dave i will check again the motor placement and the propeller balance, how about my pixhawk mounting do i need to change it or put a damper mounting on it?
Start with your blades and checking to make sure the motors are all flat
hi dave can i ask what log analyzer you are using? is it the dataflashlog in MP?
or another program?
thanks dave have you seen my message to you?
by the way dave what should be the best vibe numbers in the graph?
Implemeted xfacta’s excellent excel calculator as a Mission Planner plugin. See Initial Parameters Calculator Plugin for details.
1 Like
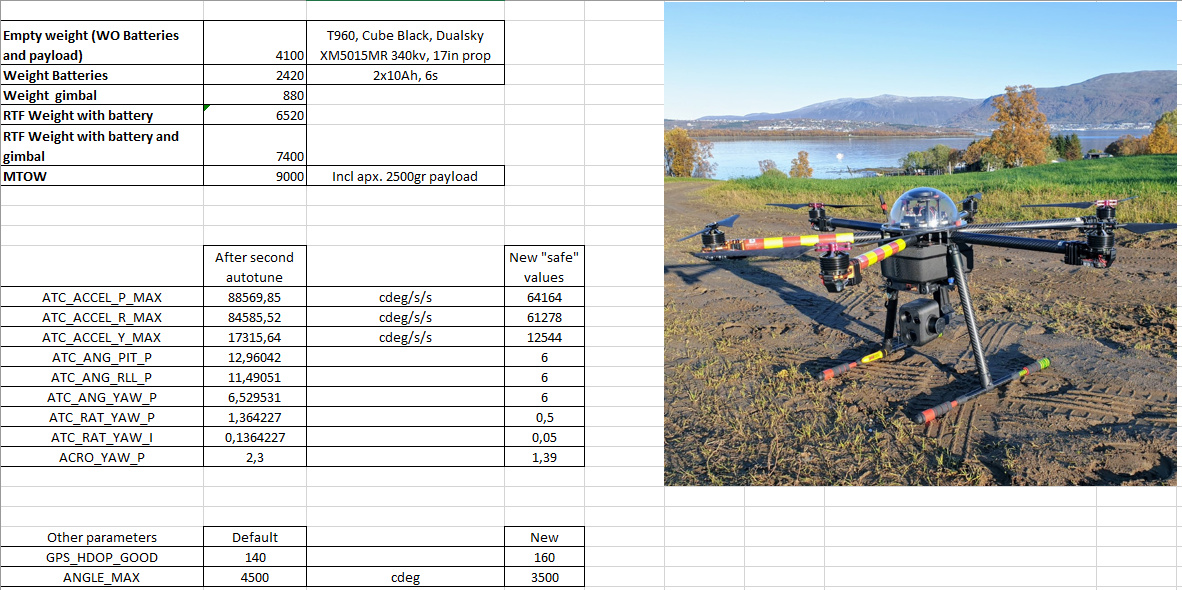
I have refitted our SAR Hexacopter with a Cube Black and Here2 GPS on latest FW4.0.4 (Pixhawk1 before).
The copter is based on a Tarot T960 frame using 17 inch propellers on 6 cells. RTF Flying weight with no payload is about 6.5kg. The regular payload weighs about 1kg (gimbal with IR, zoom and night camera), but it can handle more if needed (apx 2.5kg payload is normal but it has been tested with 4.5kg also).
I have tuned it using the excellent tuning guide + parameters and plugin from Xfacta/Escobandi. In addition it has been tuned with dynamic and static notch filters, (excellent help and patience from Andy Piper in the Notch tread).
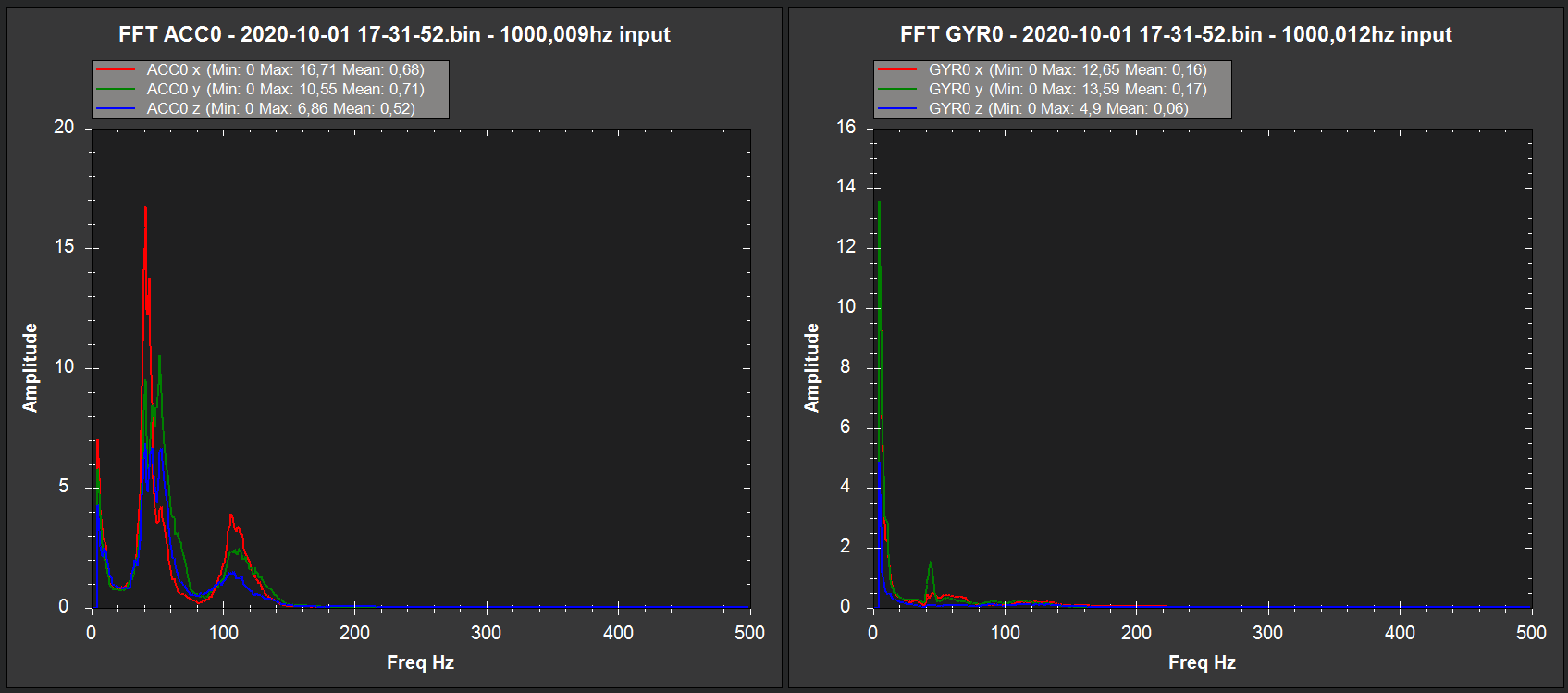
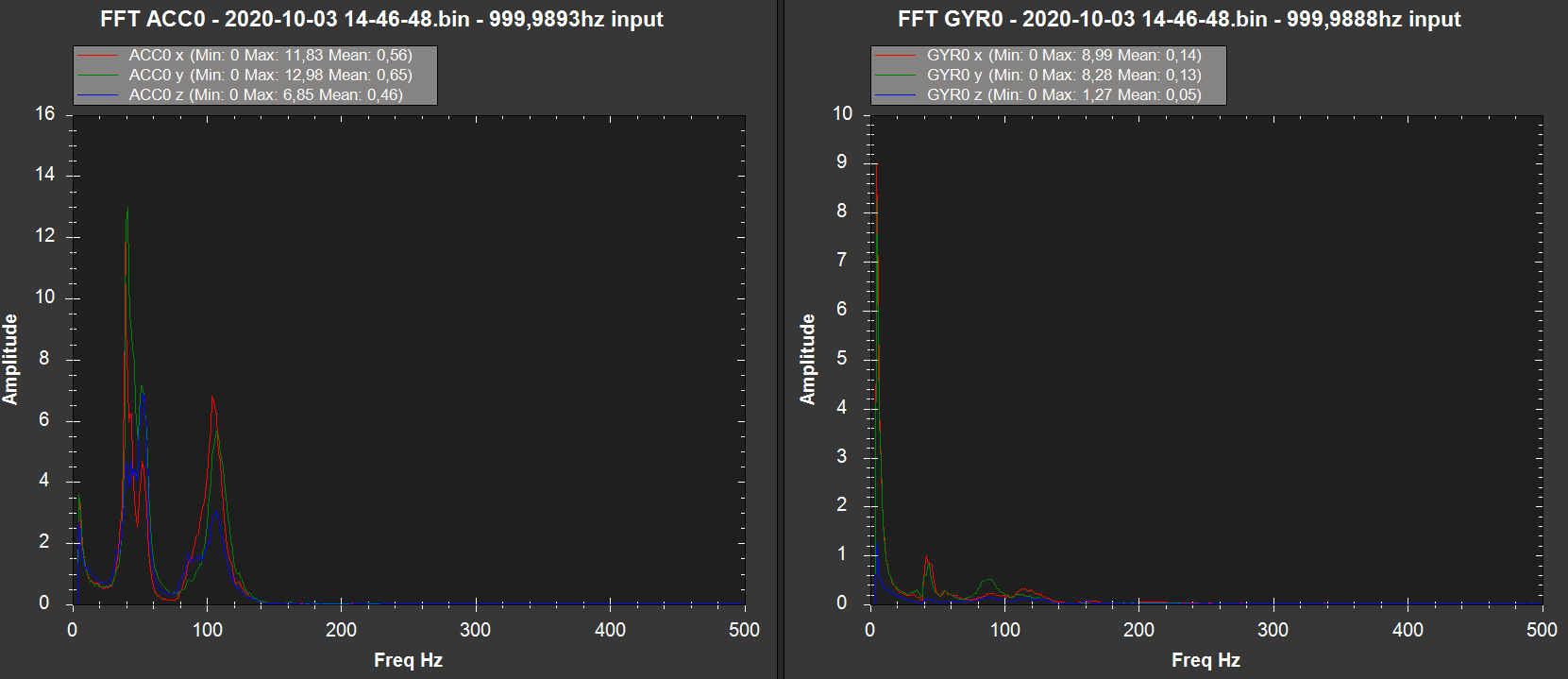
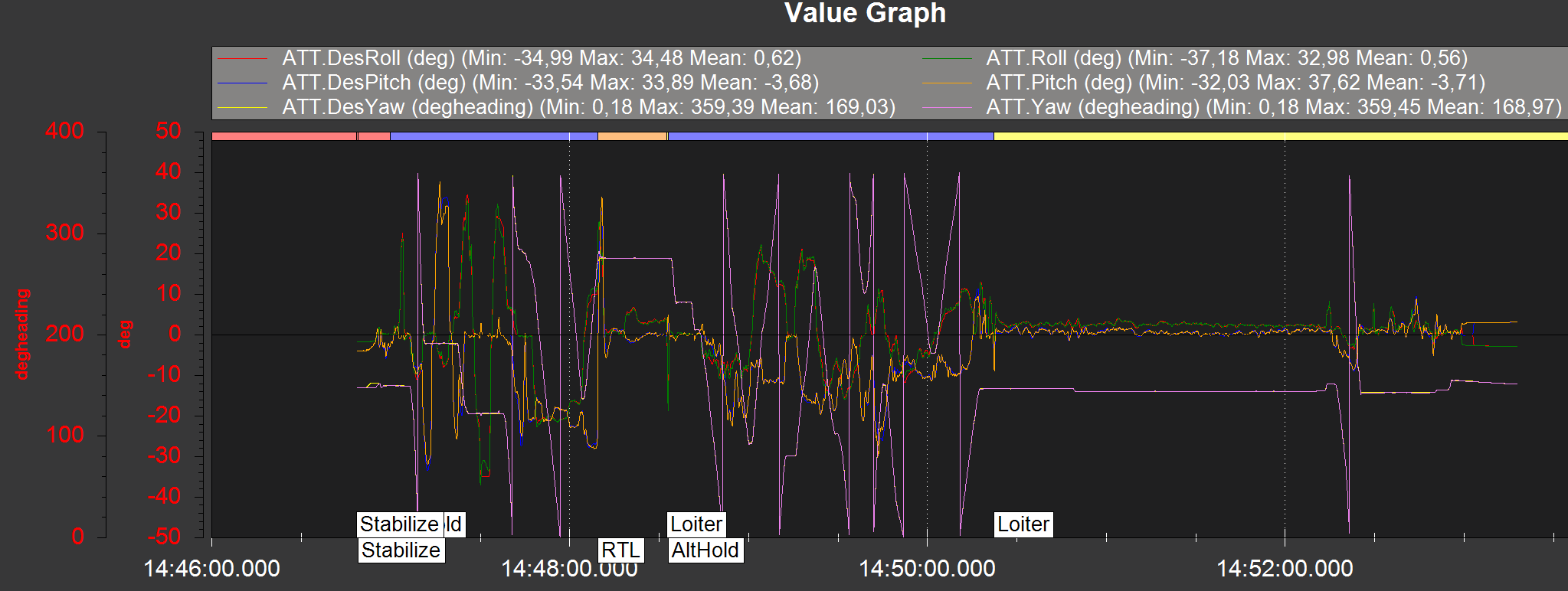
It flew quite well after getting the Notch configured and it has now been though a second autotune. It still flies quite well and I have given it the beans i both stabilize and altitude mode. It has really low vibes and minimal magnetic interference to the magnetometers. I still feel it might slightly be on the “aggressive” side of a tune, considering that it is ment for SAR use (the autotuned parameters also suggest this).
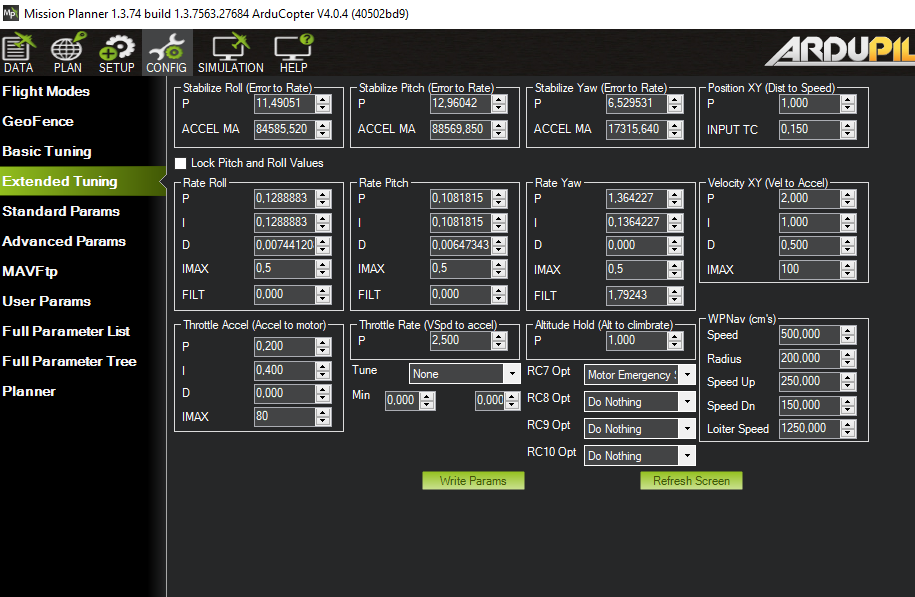
With reference to the tuning guide I have plotted the current parameters and the suggested “safe” changes. I feel that some of the parameters like the ATC_RAT_YAW_P (and I) will get quite low following the instructions.
I would appreciate a second opinion before testing the new “safe” values 
Other things I should consider changing?
I have attached the pram file, link to the last .bin file (aggressive flight with vertical “drops” to test for instability), and some screenshots if needed
Regards Ronny
param_tor_etter_2_autotune.param (18.7 KB)
https://drive.google.com/file/d/13BWA7rxLM1VwYwsjAJIubYVk6b_85sjF/view?usp=sharing
Everything looks really good. I would set BATT_FS_CRT_ACT,1 though.
The one thing I do note is that sometimes motor outputs are going to minimum to maintain stability during manoeuvres, and hover throttle is quite low
MOT_THST_HOVER,0.1919
This means you’ll have to add some weight or change to slightly different props.
You might even be able to drop your MOT_SPIN_MIN,0.15 slightly.
If by
you mean the craft is fairly sports like through the RC control then try changing this
ATC_INPUT_TC,0.22
and you can set it on RC channel 6 tuning for a knob or even a switch:
TUNE,45
TUNE_MAX,0.15
TUNE_MIN,0.3
For your “safe” values I would only change the ACCEL values to start with. You can round them off too ![]() no need for them to be some exact division of the originals. So for example you might like 62000 for Roll and Pitch and 10000 (or less) for yaw. Testing…
no need for them to be some exact division of the originals. So for example you might like 62000 for Roll and Pitch and 10000 (or less) for yaw. Testing…
I would only change the other “safe” parameters with more caution - testing will be the key.
You might want to check and test the PILOT params:
PILOT_SPEED_UP
PILOT_SPEED_DN
PILOT_ACCEL_Z
Personally I’d try to stick with just changing the ACCEL and ATC_INPUT_TC params if possible and avoid the rest, in the name of simplicity.
Any reason to change that GPS HDOP value? I see you have a lot of SATs but HDOP goes a bit high…
You can experiment with GPS_GNSS_MODE to set the constellations used.
Typical values might be GPS_GNSS_MODE,67 or 11 - MissionPlanner pops up a selection box so you dont have to calculate the bits or add up the values.
1 Like
Thanks for a really comprehensive answer as always Shawn
To start at the top, It was my plan to set the BATT_FS_CRT_ACT, but thanks for reminding, as I might have forgotten otherwise . You are right about the motors going to minimum as I was doing some quite aggressive maneuvers, including “vertical drops”, where I, in stabilize mode, lower the throttle significantly to check for instability (it almost drops).
The craft is now flown in its most “aggressive” state (lightest, without any payload). In practice it will never be this light, as the standard payload ads about 900 grams. It can easily handle more (you can see some figures i the excel screenshot). I will have a look at lowering MOT_SPIN_MIN slightly below the default 0.15 but I dont think it will be necessary.
You are right “aggressive” is not the right word as it flies really smooth. Sporty is more accurate I will have a look at tuning the ATC_INPUT_TC as you describe.
We are on the same page regarding the main tuning parameters as it was my thought to only change the ACCEL values to start with and evaluate from there.
BTW, do you know the reasoning behind recommending to lower the ATC_ANG_ values to 6 if they are above 10 after autotune? Same goes for the ATC_RAT_YAW to 0.5 if it is above 1?
I can understand the reasoning if autotune produces a twitchy craft with high values, or am I missing something here?
Thanks for reminding me about the PILOT_ parameters. I will for sure play with them now that the testing and tuning phase is almost done.
The GPS HDOP value change is due to, what is believed to be an error reporting HDOP correctly when using a UAVCAN GPS (I might even set it way high, depending on what is being concluded in the end). My self and others have reported higher HDOP values after changing from Serial GPS connection to CAN GPS HDOP with here2 can GPS
I will for sure have a look at the GPS_GNSS_MODE to get the best constellation for my area.
Thanks again Shawn
Regards Ronny
I forgot to say, because of a bug in autotune on 4.0.x (fixed in 4.1) you should set FLTT to 0 while running autotune - if you do not do this the twitch input will be limited to the FLTT value and you will get a suboptimal tune. When you have tuned you can then set FLTT to something like 30hz max to prevent notchiness on your input (it will basically feel smoother).
You should generally leave the ATC_ACCEL_ values to those set by autotune - these are the maximum accelerations observed by autotune so going above these is pointless and going below will limit control - unless you really have reason to believe that you want to limit the accel because of some physical factor like additional payload. They are also really vehicle specific.
ATC_ANG_ are also really vehicle specific and will be determined by the amount of noise in your system. On my small copters these go to 18 on all axes. The fact that you got to 12/11 on a big copter is indicative of a really good tune and little noise. I think you are unlikely to need anything above 10 on something of this size. On the flipside anything under 6 indicates a lot of noise and a poor tune.
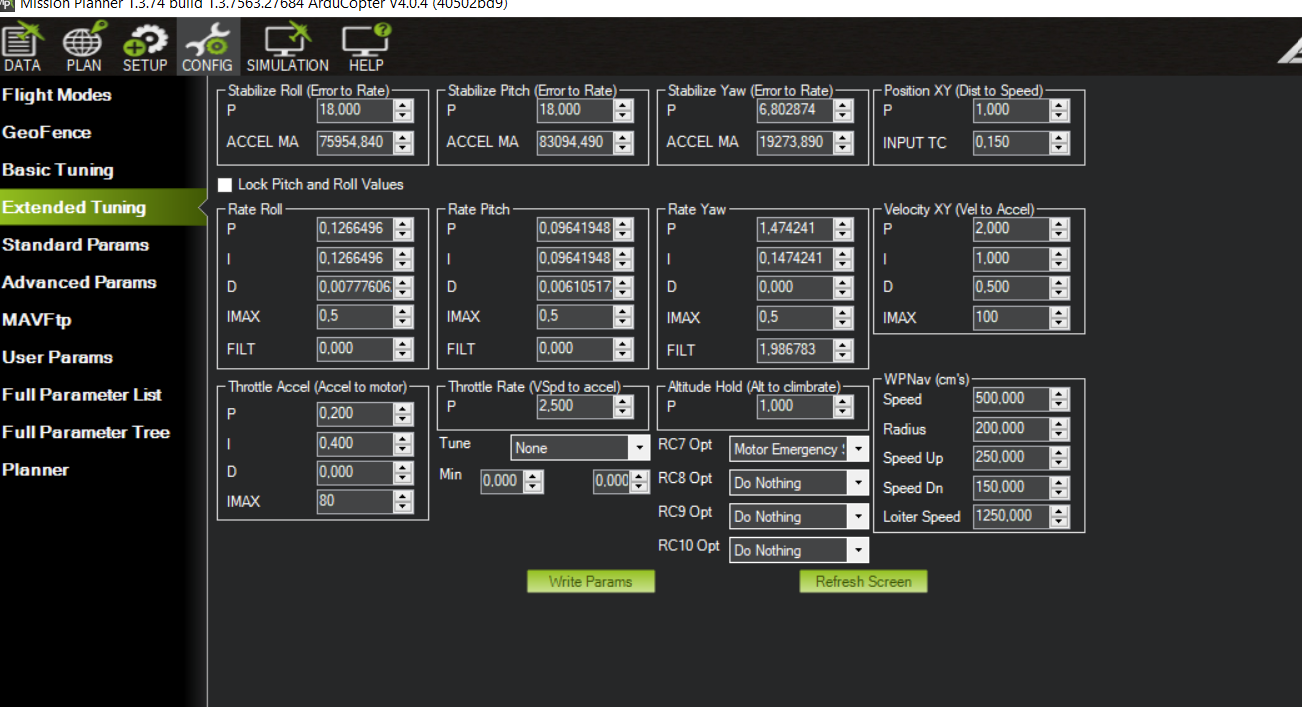
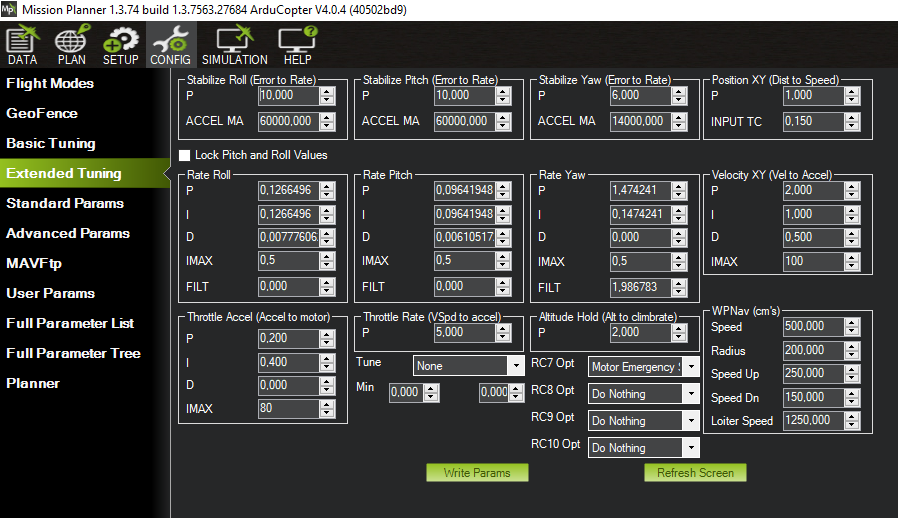
Thanks for letting me know about the FLTT bug. Just to be sure, these are the parameters (the three upper ones):

So I should set these to 30Hz after the autotune, in stead of 13.5Hz that the MP calculator gives for my build?
Btw. I can note remember doing anything to the PSC_ACCZ_FLTT. Should it be zero?
The tuning guide says to lower the ATC_ACCEL values based on the formula for weight difference, when adding payload (I always have +1kg (gimbal), but occasionally up to about 2.5kg). What do you feel is the best action here?
Regarding ATC_ANG_ , so do you feel I should drop them to 10 (roll and pitch), or leave them as they are?
Thanks for all the assistance, it flies really smooth now. If one more autotune with FLTT=0 can make it even better, i am all in
Regards Ronny
Yes those top 3. 13.5Hz means that the twitch input will definitely be too soft.
After you have tuned - not sure, You can actually leave them at zero and it will fly ok. You could try 30 and 10 to see what difference in feel you get. Too low and your pilot input is going to get attenuated. 30Hz is probably a reasonable maximum, but I’m pretty sure we can all move the sticks faster than 10Hz.
The formula for weight difference sounds reasonable.
ATC_ANG_ I think 10 will feel no different and give you more stability in propwash. But see what autotune gives you with FLTT at 0
Thanks again Andy. Autotune is then the first thing on my to-do list tomorrow
I have now done the third autotune, this time with FLTT=0. After the autotune the ATC_ANGLE_ values where maxed out at 18 (roll and pitch)! I set the FLTT=30 and tested with these high settings. It flew fine. After landing I reduced ATC_ANGLE to 10 for roll and pitch and 6 for yaw and also reduced the ACCEL values slightly to accommodate extra payload. Then I had some more flights both with and without 900gr payload and it stil flew fine.
If there aren’t any major issues to be seen form the screenshots or logs, I think I will continue outfitting it for SAR use (some connections remaining for interfacing the gimbal to the hexacopter).
The Gimbal houses a Flir Tau2 640 thermal sensor, a 30x optical zoom camera and a night vision camera.
Log: https://drive.google.com/file/d/1lfWwA3ClNZmmyzRwqlrxkr-ZTaFJ5obY/view?usp=sharing
param_tor_etter_3_autotune_pluss_justere_param.param (18.6 KB)

I presume you mean ATC_ANGLE_*_P - but that’s great news and validates the theory. If they go to 18 then you have a great tune!
Yes ATC_ANGLE_ my mistake. I will correct above post. The tune feels quite good now
Thanks for alle the help
Regards Ronny
1 Like
I have autotuned my 5" quadcopter running arducopter 4.0.4 keeping roll,pitch,and yaw FLTTs to 37.5 while autotuning, after autotuning in all roll,pitch and yaw axes these are some params:
ATC_ANG_PIT_P,18
ATC_ANG_RLL_P,18
ATC_ANG_YAW_P,6.686522
ATC_RAT_PIT_D,0.008305321
ATC_RAT_RLL_D,0.007172775
AUTOTUNE_MIN_D,0.001
After looking at autotuning guide, these values suggest that autotune has been successfully completed, what you think about the tuning on this quadcopter where FLTTs have not been set to 0 ?
Log and complete parameter list is attached below, this is the log of flight after finishing autotuning:
5" quad log
You will certainly get a better tune by setting FLTT to 0 while running autotune - whether you will be able to tell or not depends on the aircraft and how you fly
okay, gonna repeat autotune on same quadcopter again with just changing FLTTs from 37.5 to 0 and rest keeping everything same as it is right now, will post the log and parameters by today, although i think it will be really difficult to compare the differences as quadcopter is already flying quite stable and well, do i need to change FLTTs back to 37.5 after completing autotuning or i can keep them to 0 ?
It’s up to you. FLTT will take out some of the notchiness from the pilot input and EKF - so you could set it quite low and still have really good control (e.g. 20). I tend to set it to 30 on my racing quads and can’t notice any loss of control.
The way I usually tell whether there is a tuning problem or not is to turn hard in acro - with a sloppy tune the nose tends to lift in an uncontrolled way coming out of the turn. Unfortunately this is also the effect that noise generates …