As usual we are always looking for help to develop the wiki pages. So videos of aircraft doing various parts of this process could be a great addition.
Feel free to ask any questions about this process. That way I can also ensure they are properly addressed in the page.
Thanks Leonard, it looks very good so far. I’ll have to go and review some of our paramaters and see how well they fit the theoretical values.
It strikes me that some parameters could be set initially with a question about prop size right after setting frame type in mission planner.
One thing I find on smaller copters is that ATC_ACCEL_X_MAX are generally too low, especially on roll - I tend to switch these off (by setting to zero) to get best response.
Another thing I do when testing a new tune / copter on small copters is to increase throttle while the copter is still on the ground above spin armed but belowe hover throttle, I then blip roll and pitch to check the copter is responding as I expect. The problem I find is, if you try and take off first - and have got it wrong - then chaos ensues. So I find this a much safer way of validating the basic control of the copter.
I am planning a couple default sets of parameters that people can load up that sets what I would consider a good starting point for a given aircraft class. The tricky bit is defining each class. I think you are correct that prop size range is probably the best metric. At the moment I am thinking:
3" to 6"
8’ to 18"
20" and up
Yeh, I do the same thing on all my multirotors and I was thinking about if I should put this in or not. The reason I didn’t was because I thought that too many people would not know what to look for when they did this test. I also worried that because many people will be looking at this guide will have very limited experience and doing that test will result in aircraft getting tipped over on the ground before they ever take off.
That is why I focused on checking propeller numbering and direction with the motors test. I am interested to hear other peoples thoughts.
I don’t think it’s necessary, but there are a lot of props smaller than 5 inches and since I’m not an expert I understood that I could play with values smaller than 0.55 for MOT_THST_EXPO,
No, not at all. This is why I asked. You have a good point. I don’t know how this parameter tracks for very small props.
I actually have never generated values for props lower than 5". So anything less than that is a guess. Thinking about it these values are based on a bunch of tests I did when I first created the parameters. There has been a lot of development in the small prop market since then!
If someone gets me pwm vs static thrust for a few very small props I can extend the curve further.
The MOT_BAT parameters are there for thrust linearisation, not the battery failsafes. In hindsight it may have been better if I called them MOT_VOLT_XXX or something like that.
One big improvement would be to add hyperlinks to every parameter so that they can be clicked on and take the viewer directly to the parameter definition.
Thanks for pointing out where I can clarify a few things further too!!
The range really comes down to what parameters I can safely provide and how quickly they change. The parameters I am considering are the initial filter values and some input shaping values. Generally the ones that people don’t know they should change when they first start out. Autotune does a good job of setting things up after that provided the aircraft doesn’t have any significant reaction quirks.
[quote=“Leonardthall, post:14, topic:44953”]
The parameters I am considering are the initial and some input shaping values. Generally the ones that people don’t know they should change when they first start out[/quote]
Absolutely - and the guide is a big step forward with that. Thanks again!
Thanks ! Indeed, I read wrongly the MOT_BAT parameter …
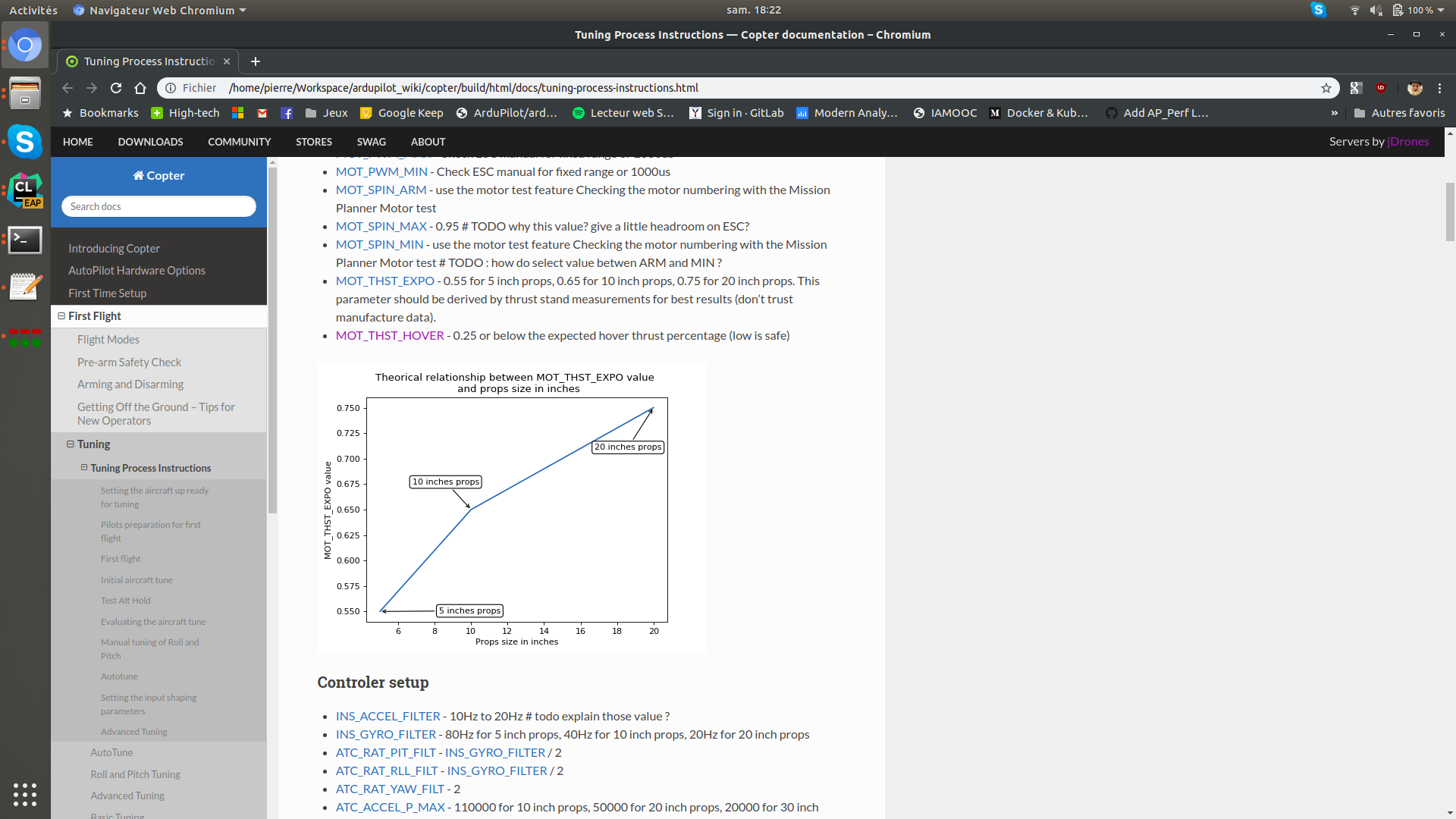
I have update with links for parameters and some plots for range … I hope it will be better for people to understand how to select a value. Here is a screenshot :
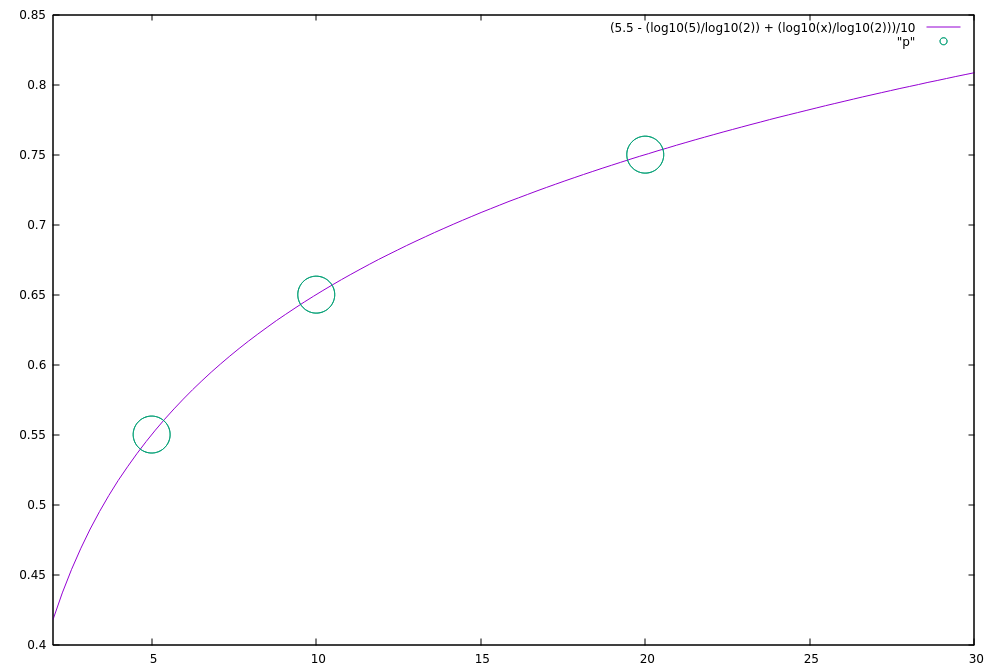
It would be nice to replace those lines with a curve. From the data I have seen they tend to level out at about the 0.75 to 0.8 mark for the larger props (20’ and above). The curve rolls over as we move down through approximately .65 at 10 inch and 5.5 ish at 5 inch. It would be nice to represent this as a gradual curve.
When using the same props in coaxial we get a similar shape but the graph is compressed by about 0.1 at the top end and probably just a little lower at the bottom end.
Could you provide screen shots of the other graphs?