@andyp1per so i did what you suggested, i changed roll,pitch & yaw ATC_RAT_*_FLTTs from 37.5 to 0, and autotuned the quadcopter again, autotune seems to work well and faced no issues during autotuning roll, pitch and yaw together.
Flying 5" props quadcopter running arducopter- 4.0.4 on omnibusf4pro
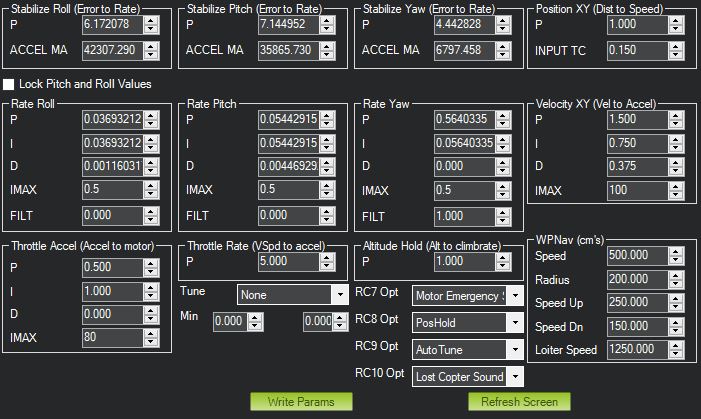
That’s my earlier PIDs when i autotuned with FLTTs set to 37.5
And that’s my current PIDs after autotuning with FLTTs set to 0
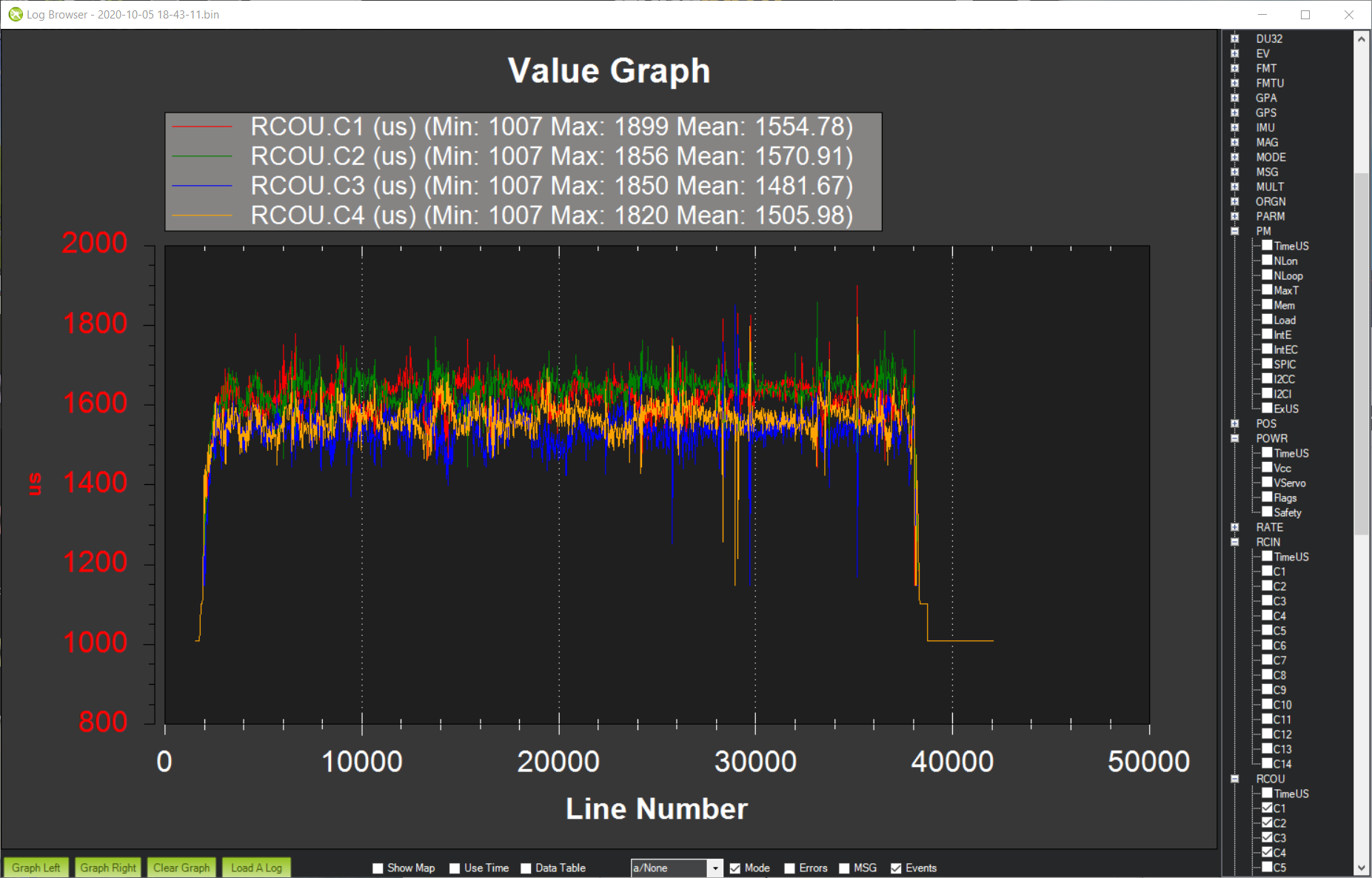
Everything seems to be working well till… i attempt to fly the drone in althold after completing autotuning process, so i take off in stabilize mode, everything was going well, quadcopter was flying smoothly, then when i switched to althold mode, weird behavior started occuring, in althold mode, my quadcopter started behaving like it is in autotune mode, it keeps making sharp roll/pitch movements but not very frequently as like in actual autotune mode, so i landed the drone after observing that abnormal behaviour, this is the log of first flight where above scenario happened -
log of first flight after autotune
Now after this flight, i attempted second flight, in second flight, till i was in stabilize mode, quadcopter looked fine, but as i switched to althold again, that same abnormal behaviour as mentioned above started repeating, but this time things went worse than before, in first flight quadcopter was only making sharp movements in roll/pitch but in this second flight, its heading(yaw) started making complete 360 degrees rotation about its own z-axis, and suddenly i lost control of the drone, and it crashed on the ground
log of second flight after autotune
this is the complete parameter list, just want to let you know that my althold mode was set on rc5 and autotune mode was set on rc6 for first flight, for second flight i just changed rc6 from autotune mode to land mode.
2020-10-05 18-43-11.log.param (18.5 KB)
One more thing is i had kept FLTTs to 0 during whole autotune process, but as autotune gets completed then i changed FLTTs from 0 to 37.5. So in both the flights after autotune, FLTTs params was set to 37.5.
I really don’t know what goes wrong here and why this weird behaviour occured and only in althold ?