Hello,
Do you have idea what kind of object is detected by LiDAR when it shows 22m distance? LiDAR distance has close relation with reflectivity of material.
And what is the actual distance (approx)?
Hello Ibrahim,
I dont think is a relflectivity related issue, I have made a lot of tests with different conditions and the problem appears soon or late. I have 2 units of the TF02 Pro and both fails, when I noticed the problem I bougth another one thinking the first it was faulty, but the same. Also it happens to me the same testing a TF02 (not Pro version), I changed to the TF Mini Plus and seems to work perfectly, no issues detected until today (5 flights without problems right now) but range is a lot less than the TF02Pro.
Another test I made was connecting the TF02pro to the PC and see in what happens using Benewake PC software, no problems found, measurements are ok for hours connected.
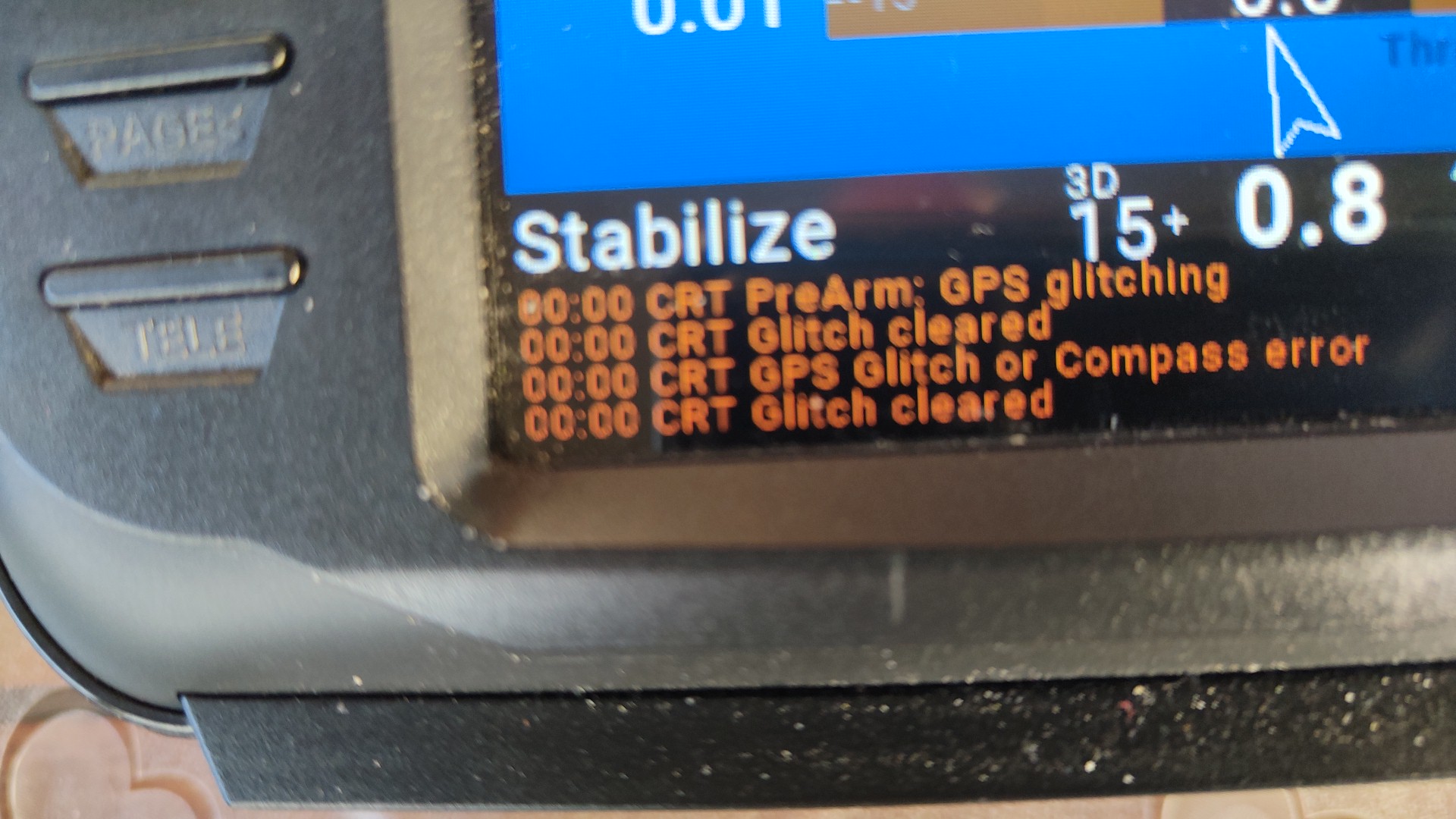
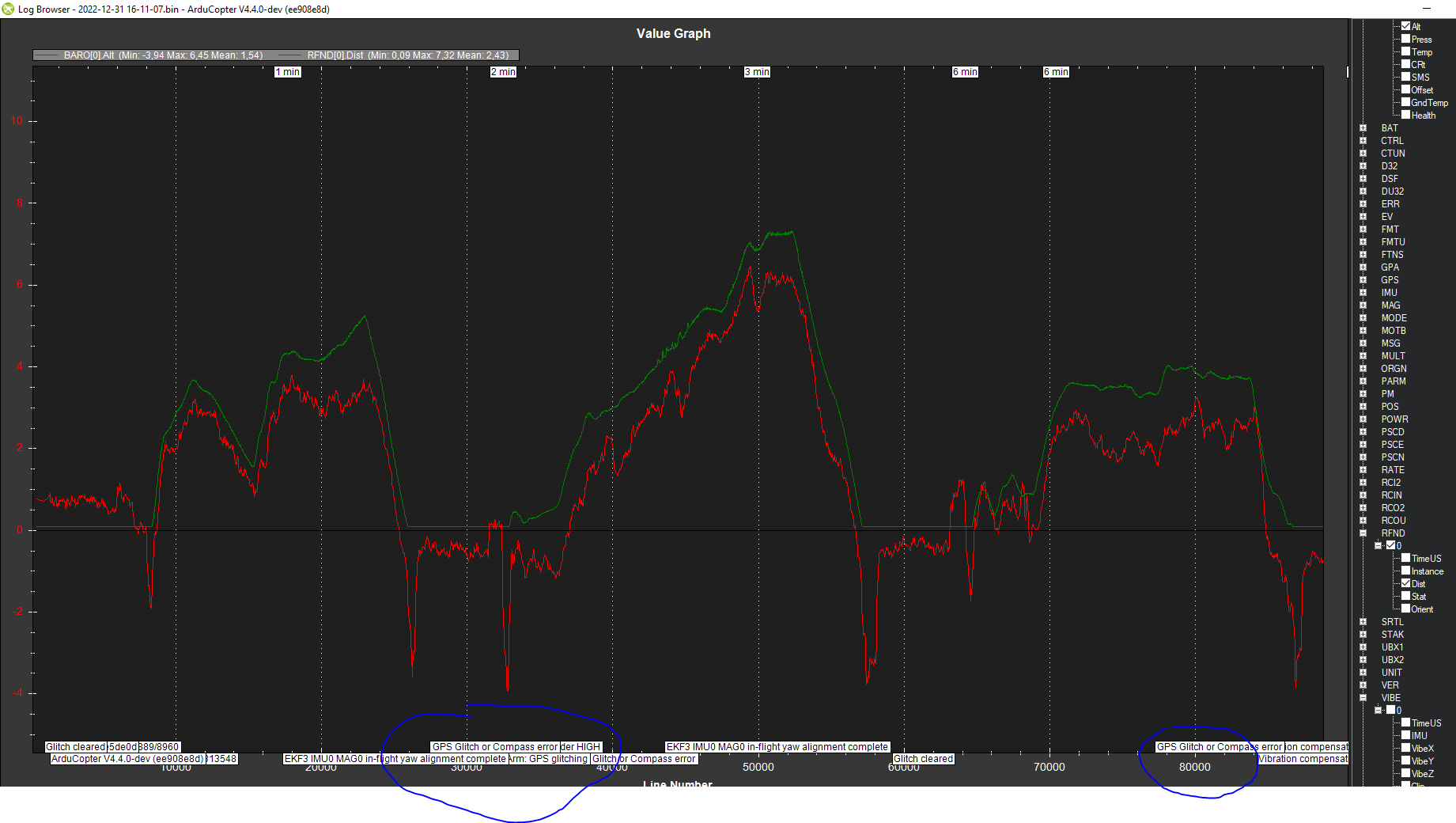
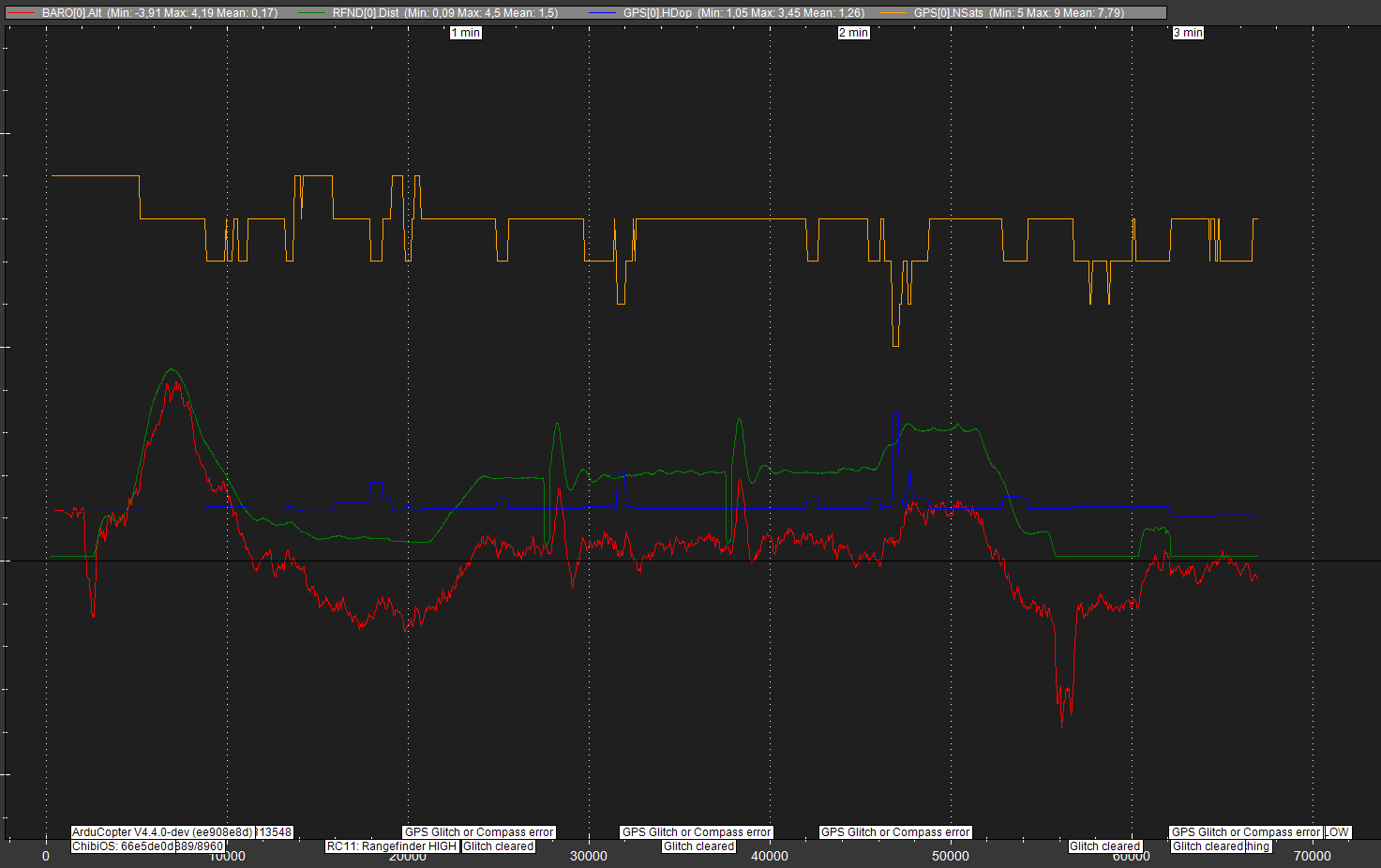
Next image shows the log from yesterday at home, the TF02 Pro was on one table looking to the celing without movement (small variations in distance in th first 5 minutes was my hand testing it if was working) and at the end start measuring 22m without any reason until it gets stuck and you have to reset, sometime also it recovers and continues measuring ok until 22m appears again. I have no answer fot this behaviour with the 3 TF02 units .
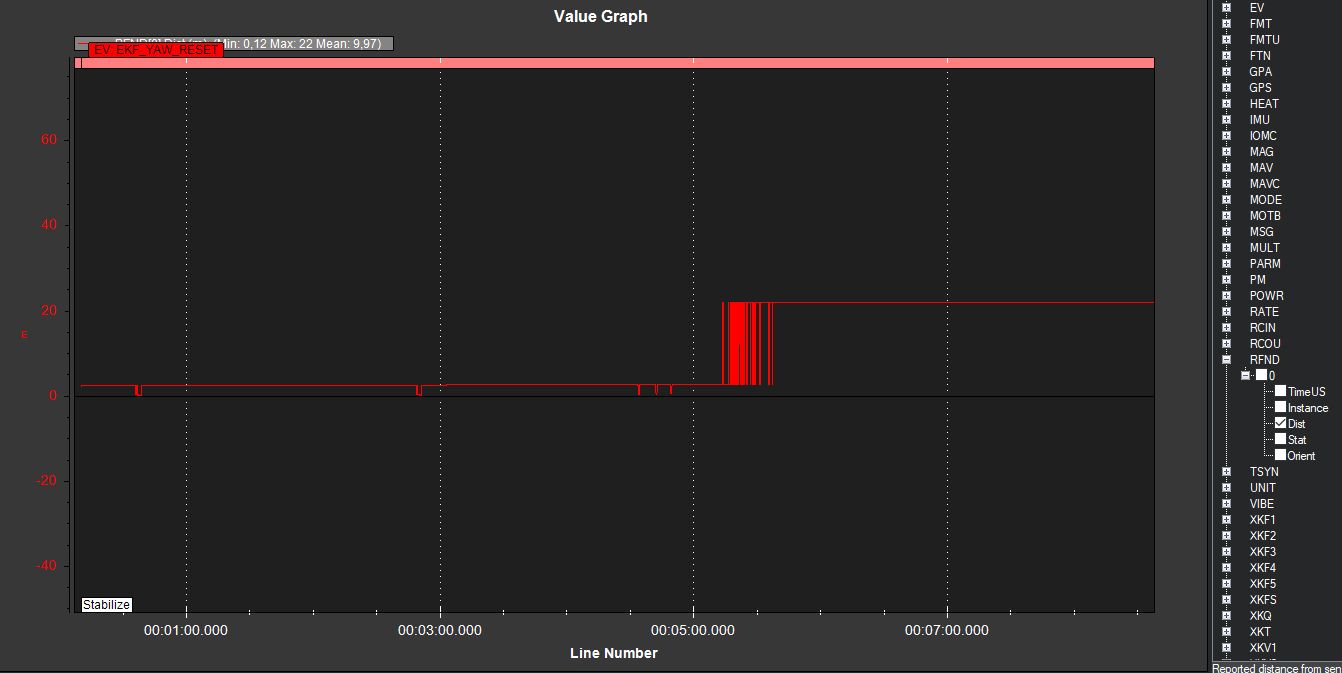
Any idea?
Just wondering if it’s possible with the TF Luna to get the distance data in mm rather than cm when using I2C mode? I can only see a method for this using serial data transfer.
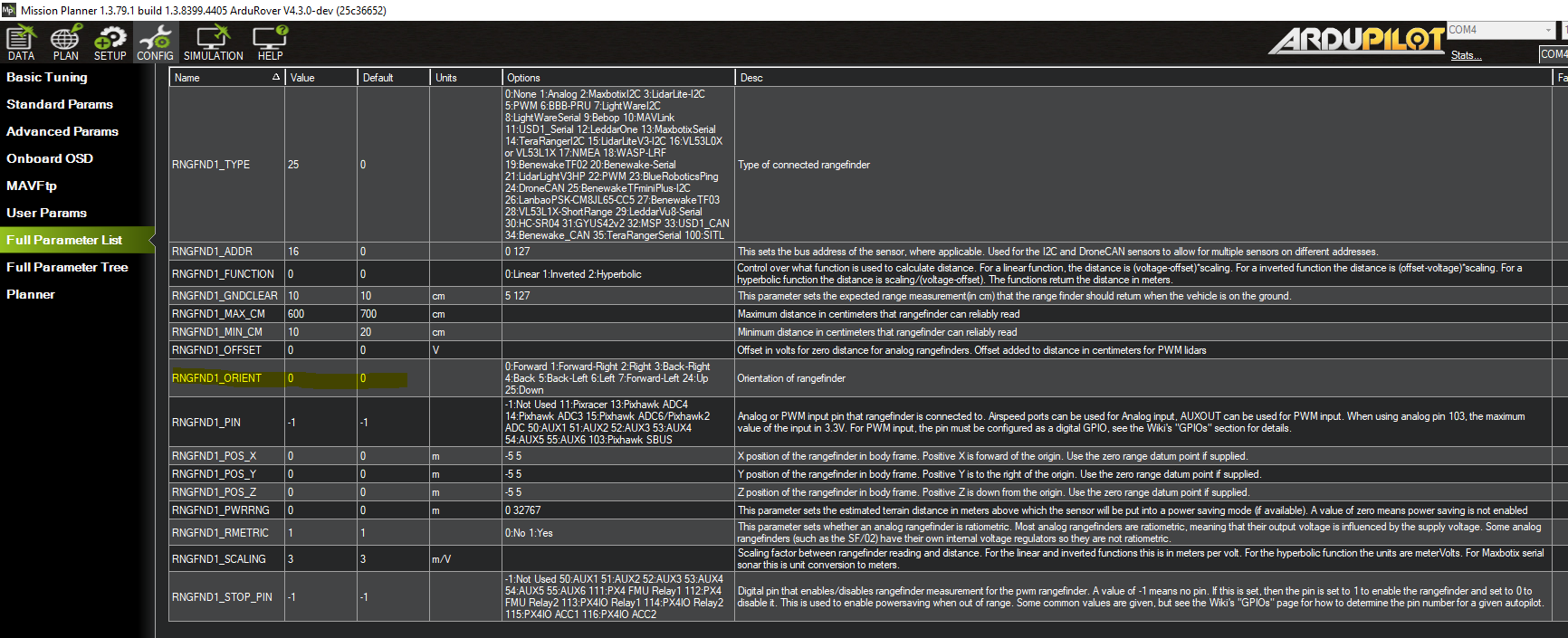
Hello, having issues trying to use the TF Luna with a Cube Orange via i2c port.
Getting a “PREARM: Check proximity sensor” and “RangefinderX not detected” messages.
Wiring configured using Benewake’s application document:
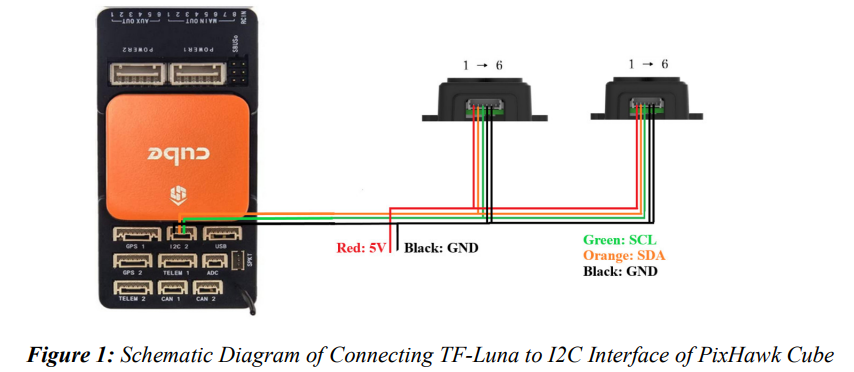
Config settings:
RNGFND1_ADDR=08 (tried 16)
RNGFND1_GNDCLEAR=25
RNGFND1_MAX_CM=400
RNGFND1_MIN_CM=20
RNGFND1_ORIENT=0
RNGFND1_TYPE = 25
I’ve tested the sensor using the Benewake GUI and its outputting the correct values.
Any help is appreciated.
Good day,
did you change the i2c address of the second tf mini?
Hello David,
Ended up figuring it out, my RX and TX wires were mixed up at the I2C connector and the correct address to use was 16 (decimal).
Only have one sensor at the moment. Needed to make sure it worked before ordering more.
Since the subject of multi minis is out there.
I had a question. If you have more then on lidar say the TF Mini Plus. And you point one down and say one up. How do you know which rangefinder is which. I know you specify up and down. But how do you know which physical lidar actually maps to up versus down.
Did you ever happen to test the TF02 Pro with i2c? I am currently running one over i2c but am noticing a possible issue. I have the max range set to 3000cm using RNGFNDx_TYPE=25. The issue I am seeing is that the TF02 Pro only seems to output 11-12m not the 30m I have the max range set to. I wonder if it’s because I have to use the RNGFNDx_TYPE=25 which is for the the TFmini Plus…
Not sure if you’ve experienced this and found a workaround. Copter V4.2.0-beta3, Pixhawk 5x
Thanks for any help.
Generally the Benewake sensors read half range when operating outdoor, is it the case ?
I guess it’s possible, I never configured it for an indoor mode. Do you happen to know if the TF02 Pro auto adjusts to a indoor mode based on some level of brightness? I tested indoors in a long hallway and my max reading is only 11-12m
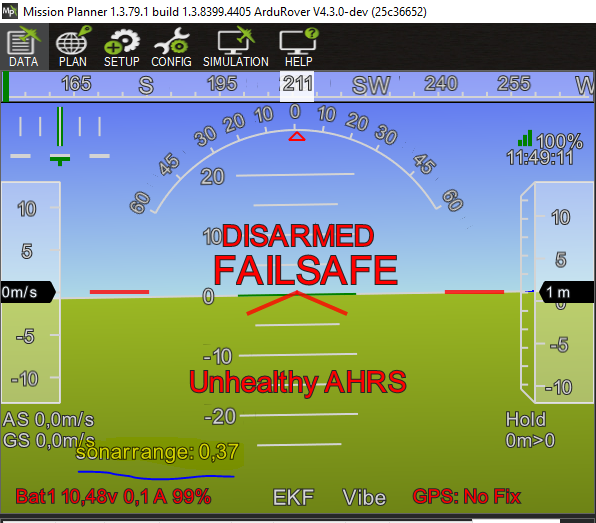
The screenshots were from a test flight. I set the max range of the rangefinder to 35m (3500cm). I initiated a RTL and once the altitude of the copter got between 11-12m it stopped reading and began following the barometer and achieved the proper RTL altitude. Then on the way down the rangefinder picks back up and is working again before landing.
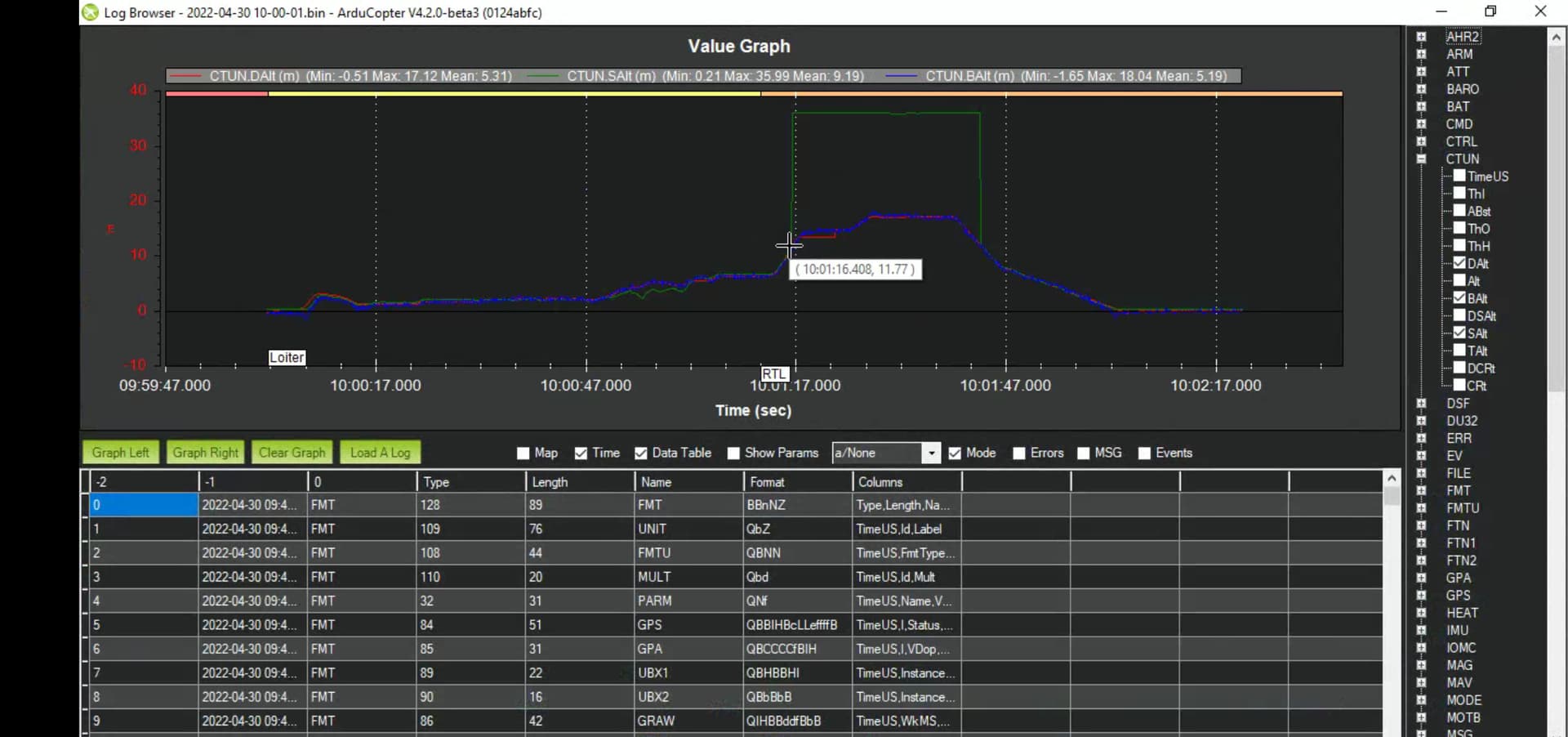

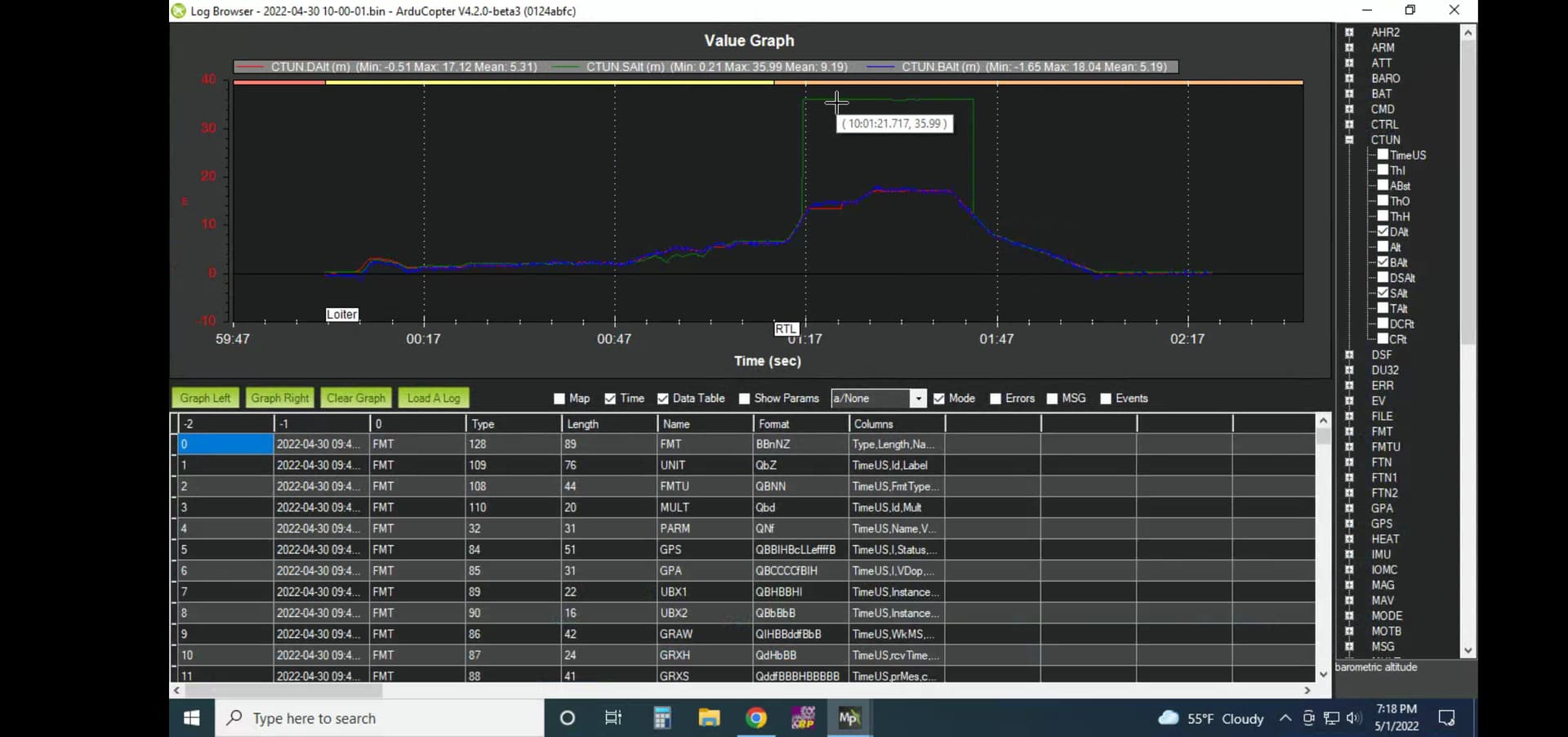
My RTL altitude was set to 30m but it did not reach the full altitude due to the rtl_cone_slope parameter and I was hovering close to home.
@Siya what is the factory default protocol for TFmini Plus (I2C or Serial)?
Hello Riz, The TFmini Plus is UART/Serial default, if you would like to switch it to I2C, you could use commend 5A 05 0A 01 00.
Or you could check whether the LiDAR you ordered is I2C version already.
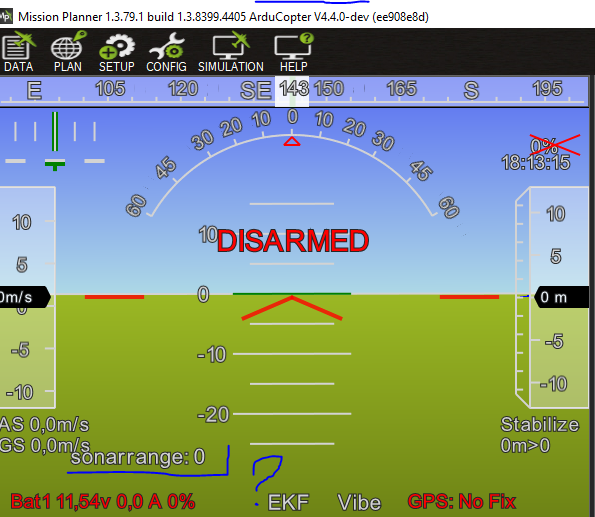
I have two LUNA TF connected in i2c to omnibus F4 (ardurover 4.3) and Kakute F4 (arducopter 4.4). In both cases they work well as obstacle avoidance (0 orientation). Reading in mission planner ctrl F (proximity radius) works fine. The difference is that in the case of ardurover sonar range it is updated with the data of the TF luna, while in the case of the copter the reading remains at 0 (although it works in flight). Why? The sonar range reading is useful to me because it appears on the radio telemetry (yaapu script).
Thanks!
If you are using obstacle avoidance then you will not be able to get data for sonar range because its for altitude hold. Here your RNGFND_ORIENT parameter value matters.
I thought so too. But look here: orientation foward 0 but the sonar range parameter is correctly updated. Maybe the rover is different from the copter?
Thank you
I tried the copter as avoidance and it works fine, then I left everything plugged in the same way but with TF luna facing down (I changed the settings in the FW). Excellent functioning but very high disturbances on the gps compass (hdop >1.2 sat 9) and unstable loiter flight. Disconnected the TF luna everything worked fine and the gps is back to hdop 0.8. The gps is on an 8cm high stand off, so do i need to shield the moon TF? How can I do? Unfortunately the copter is small (4")
Thank you
With this GPS (bn880q) in this same copter and configuration (but without lidar), I also had hdop 0.4 and 25 sat!
Mu metal might help.
1 Like
You are right but it is hard to find. I have a very dense copper network, in the meantime I’ll try that
Easy enough to find (depending on where you are I suppose) but very expensive for a trial.
@ibrahimqazi @dkemxr @amilcarlucas
Hello everybody. i tried a double layer of copper mesh and lengthened the gps stand holder. Does not work. I interposed a further copper mesh layer but nothing. I laid the TF luna FC connection cables under the copter frame and finally the situation seems to have improved. I think I’ll have to try a very short shielded cable.

I have to replace these cables with shielded and short cables