That board doesn’t have an external I2C connection.
I forgot check the pinout
It’s really to bad they didn’t bring the I2C bus out. It would have way more use cases if it did. As it is it’s nitch for Ardupilot. Someone will do it, just have to wait.
1 Like
During the design they have limited the lines of the MCU coz f745vet6 can support i2c lines… can and also spi.
Flywoo makes an F745 AIO that has I2C pads broken out. I made a target for it and submitted a PR. Maybe it will be added to Ardupilot soon. Not having I2C is kind of a big limitation for Ardupilot!
Hi Dave,
TF-Luna can be used in CAN BUS Mode? How to connect and configure it?
Good day,
so… for use tf luna on a can node you need first a can node… it will convert an uart… spi and a i2c periph to CAN.
If you don’t have it, you can look for the mRo uavcan node…, only few settings and wires and you are ready to go.
Thanks Dave,
i’l take a look at mRo uavcan mode.
just let me know if you need suggestions
Just got my TFMini-S UART version. I don’t see any values when I set the RNGFND1_TYPE=20. Am I missing something?
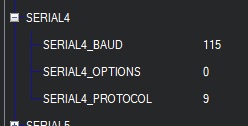
Set Serial (Number , Speed, Protocol) for your UART
1 Like
I had those setup, it’s working. I was testing in on the table where it shows a value of 0, whereas my old TFMini shows 0.3. Sorry for the trouble and thanks a ton for the help 
greetings!
if anyone have the TF-Luna_std_v3.0.9-main.zip firmware , please can you share the file.
above mentioned links are not working, and i cannot find it in the internet either.
thanks in advance.
1 Like
thank you very much brother
I just received an email from Benewake with the latest version which is apparently 3.3.0
TF-Luna_std_v3.3.0-main.bin.zip (20.0 KB)
Their customer support is very good.
1 Like
Thanks!
There is any change log ?
What you have is what I got.
Maybe on their web site?
I did not find anything … 
Hello to all, I have noticed that using my TF02 Pro sometime shows an altitude of 22 while flying while your fly the drone in a very different altitude. Sometimes last a few seconds and return to its normal readings and sometimes it just keeps showing 22. The problem is if you are flying in Auto it get a failsafe and enters RTL.
I am using copter tested with firmwares from 4.0.5 to 4.1.4 and it keeps doing the same happening the same with 2 units I have, one of them new and both do the same.
Any idea?
![]()
Thanks