Hi @Rolf thank you so much for looking into the log. I have a compass (matek m8q-5883) aligned, but it may have taken a few try to arm on that flight. I will check.
I learned a lot on log analysis with tailsitter VTOL last year but tilt is new to me.
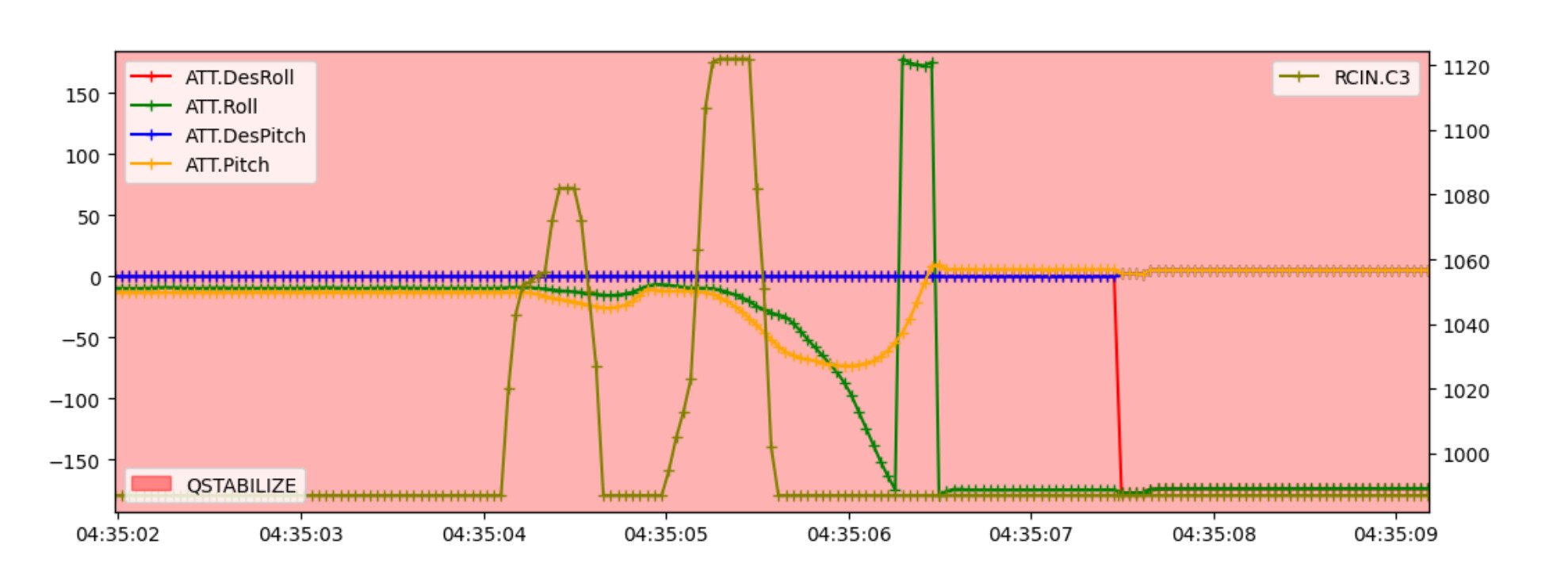
Thank you for bin log. I can see Manta rolls over as soon as you apply throttle, while plane does not want to do so (ATT.DesRoll stays 0) So right and left motor may be opposite.
It does not matter how motor is wired at 4in1 ESC, no need to change connection. you can change motor assignment at Mission Planner Servo Output screen.
A few general questions about bench testing.
I noticed someone has a issue when USB connected to use Adrupilot and battery was plugged in. I assume that was a unique issue.
Is there any reason you can’t plug in the USB and battery at same time to do bench testing?
Is it okay to use a 3s or 4s lipo for basic testing while I wait for a 3s1p.
Hi @dasjlm, no problem to connect USB while Battery plugged in, and it is needed for some calibrations. Depends on FC design, USB will power only FC itself and external sensors/GPS, TX, not servo or ESC.
Anyone get SBUS to work with the Manta’s fight controller. I’m using a FLYI6X transmitter with output set to PPM/SBUS. I soldered the wires to the SBUS pads on bottom of flight controller and changed the settings per the special instructions. I used a new plane definition on the transmitter and did a bind.
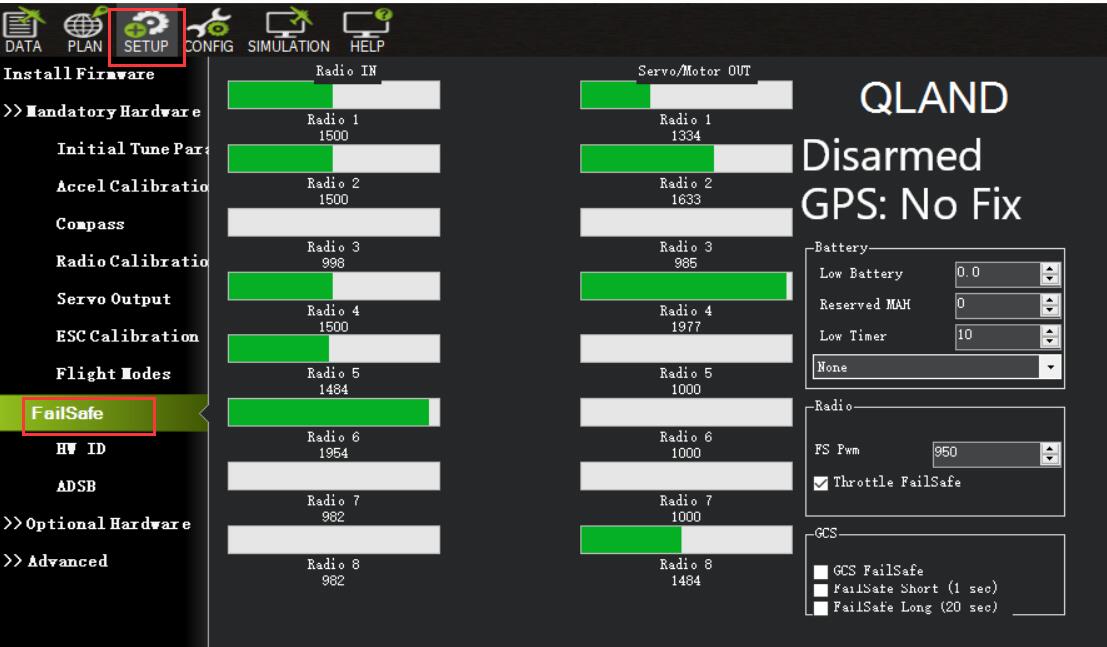
When I connect the flight controller to adrupilot on my laptop the flight controller blue light flashes an red light on receiver is solid on which I believe is correct at this point. When I do a connect via ardupilot I can read the parms okay so I know AdruPilot is communicating with the flight controller. But when I try to calibrate the radio none of the controls I move change the screen so I assume the receiver is not detected by the flight controller.
So just wondering if anyone else had any luck with SBUS and FLYSKY as I think I have everything set up correctly and I double checked the SBUS connections.
Make sure your receiver is correctly outputting SBUS and not PPM
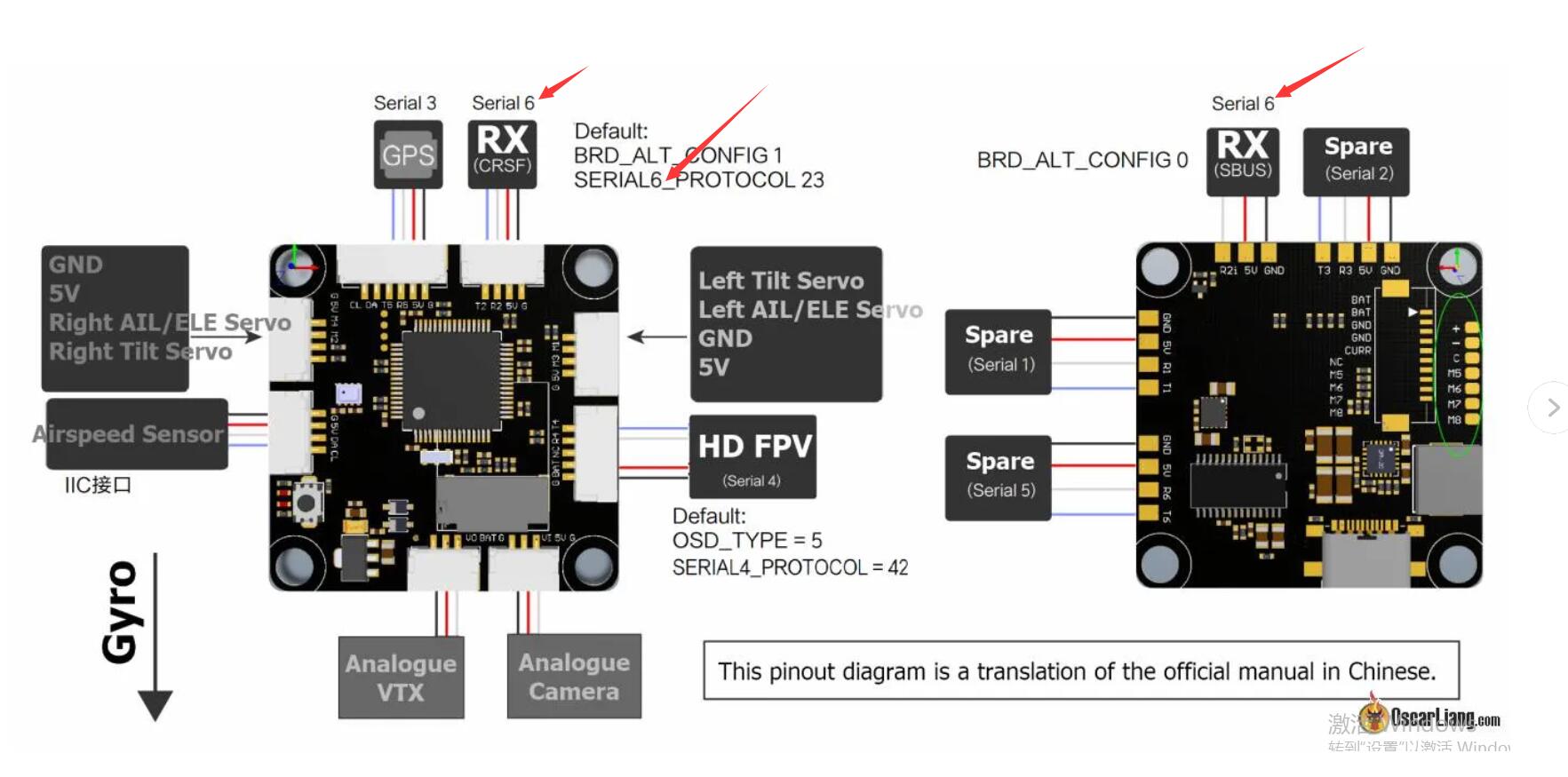
The special instructions for using the SBUS receiver seem to be incorrect.
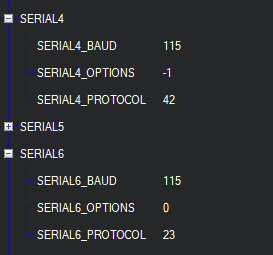
SERIAL6_BAUD 115 is right!
SERIAL6_PROTOCOL -1 is right!
BRD_ALT_CONFIG 0
SERIAL4_BAUD 115 is wrong!
SERIAL4_PROTOCOL -1 is wrong!
BRD_ALT_CONFIG 0
This is what I am seeing in MP, and the Mission Planner is showing proper movement on the setup screen? Actually now I am confused…Are you sure about Serial 6 not 4? Protocols make no sence as 42 is DisplayPort, so how is MP showing stick movement? I didn’t try Serial 6, Serial 6 is how it is from factory.
I tried settings up SERIAL6 as suggested but didn’t help. Interesting they had SERIAL6_PROTOCOL set to 23 and it is not listed in AdruPilot. I did sent note to FIMI support. I’m hoping they have some FLYSKY SBUS experience. The FlySky i6X transmitter allow you to set receiver output mode.
It gives you the option to set the receiver output to
PWM and serial to i-Bus or S.BUS
or
PPM and serial to i-Bus or S.BUS
I’m new to ArduPilot so it’s all a bit foreign to me at this point as this is the first time I tried SBUS. The transmitter I have is suppose to support SBUS and the ia10b receiver is suppose to support SBUS. According to FIMI all I had to do was solder the SBUS wires to the SBUS pads on the bottom on the receiver and then change the settings. But always seems to a trick. Hopefully someone has got the Manta FC to work with an ia10b and SBUS and can let me know if there is another step. Anyway that’s for your suggestion. If FIMI comes up with something I’ll post it.
Took a second look at the Serial_6_PROTOCL and it is 23 with is RC IN. I assume set by FIMI. That makes sense as they have solder the SBUS wires to the SBUS pads which according to their diagram is serial 6.
So I think they want the SERIAL4_PROTOCOL set to -1 to indicate it is not used.
Anyway looks they want me to take a video and pics so guess I’ll have to go thru things step by step tomorrow. My only fear is they’ll come back and say it’s a FLYSKY problem.
SERIAL4_PROTOCOL 42 seems strange? Do you have a cable plugged in it.
Did you connect SBUS via cable to SERIAL4 or solder to the SBUS ports? I was told to solder it to SBUS pads on bottom of FC.
Serial_6_PROTOCL 23 It is used by default for crsf protocol devices, such as ELRS. I confirm that it is set according to the method I told you, because I am also using an SBUS receiver, so you have to confirm again whether your receiver is outputting correctly SBUS signal
SERIAL4_PROTOCOL 42 It is the default interface for high-definition image transmission, so this setting is correct
You can view your joystick output under the mission planner
Glad to see you have it working. Not sure if FLYSKY is causing issues. What transmitter/rec are you using?
. I will try again tomorrow as I kind of burt out tonight. Thanks.
Let me share some of the modified parts I collected about FIMI Manta. Its dimensions are suitable for Manta. I hope it will be useful to everyone.
The download link is as follows:
The special instructions from FIMI are wrong as you stated should be using SERIAL6 not 4. Tried again. No luck. Suspect it could be FLYSKY is using PPM Output and SERIAL SBUS. Not quite sure what that means but PPM is not autodetected by ArduPilot so that might be issue. I guess I need to get deeper into this to see what is going on. Always a learning curve when you get into new rc things.
Did you install the Speedybee f405 wing on the manta and get it flying !
I have the Fc version and have it flying very good and
I also have non fc version Manta and I put Speedybee f405 wing in it and I have everything setup and working but I cannot get it to takeoff in vtol qstabilize and it seems like the front motors aren’t applying the same amount of thrust and when I engage the throttle the wing rocks from side to side and I calibrated Esc,s and also tried dshot 300 and nothing helps ! If you have your Manta flying I would greatly appreciate if you shared the correct parameters because the parameters I used from the Fc Version 4.3.7 ardu fw apparently are not accurate on the Speedybee f405 wing 4.4.1 ardu fw !
I have a Manta no FC delivering tomorrow, I was wondering the same thing about the speedybee F405 wing. I assume you loaded the factory parameters? Painless 360 worked on a better VTOL setup for the Ranger. It’s the same tricopter VTOL layout, obviously weight and balance will be different, but I might try that if the FIMI parameters don’t work. https://youtu.be/Pe63bvtlEfM?si=P05l330wTh4m_z5_