I also have fc version and non fc version and just finished building the non fc version with Speedybee f405 wing and you will have to do traditional tilt tri motor vtol setup!
Using the parameters for the Fc version with comparable Matex f405 wte fc version aren’t compatible with the Speedybee f405 wing !
I have everything working but I still have to take 1st flight and put auto tune on it !
I would recommend if not using a Matex f405 wte fc then keep the FW version defaults and work from that !
Good to know, that’s the information I was looking for. Probably not worth effort to offset the cost of the flight controller. Thanks again…
Quick test hover in Qhover.
All seems well. To windy for proper test.
Any pointers in setting fail-safe. RTL using ELRS. Stock FC version?
Finally here!!! Looks all there…
Hello,
I’m preparing my Manta for the maiden flight. I’ve taken some decisions a bit different from what you describe here. For example, the whole thing is so ridiculously small (smaller than a Phantom’s FX-61 wing) and not much more compact when put in pieces, that I’ve decided to keep it in one piece (but still retaining the possibility of removing the wings for example for replacing the servos).
I have the following questions:
-are there some tested flight configs available? With PIDs, transitions settings etc.? Preferably for Matek H743 Wlite but of course any other FC will also be fine
-which metal gears servos can be used for replacing those low quality elevons servos?
-has anyone tried a bit bigger/more powerful motors?
-are any spare propellers available?
These are the flight control parameters provided by fimi. I hope it will be helpful to you.
https://drive.google.com/drive/folders/1szWQ55Go8ucqXHmjVGpyofnstB4xw6QH?fbclid=IwAR006W7Q90knRounTollwQkavniiRzcyVZel5643XHYAUMI14SWUHkqz4LE
Thanks! Did not know about this.
I’m trying to setup Manta with built in FC but have problems getting RadioMaster Boxer with Internal ExpressLRS working with a BetaFPV SuperD ExpressLRS RX. The TX binds ok to the RX, but sticks do not do anything in ArduPilot radio configuration.
In Radio Calibration I have green bars to middle on Roll, Pitch and Yaw. .
In the Failsafe I have green bars on Radio IN, Radio1 and Radio4 and Radio Out, Radio1 and Radio2.
But nothing happens when I move sticks in Radio Calibration so I assume those are default displays?
Do the green bars mean anything or are they just default displays?
Note I created a new model on the boxer and set it to use the internal ELRS.
I did check the TX transmit goes to the RX receive etc so that seems good.
I checked the required parms in ArduPilot
SERIAL6_BAUD 115
SERIAL6_PROTOCOL 23
BRD_ALT_CONFIG 1
I get the impression I’m missing something basic as others got it to work.
Any suggestions?
Please ignore the above note as I did get it to work. I had accidently set CRSF on Serial5 and Serial6 and of course that won’t work. Not sure how that happened but fat fingers. Anyway it works so will be able to finally move forward.
The parameters of FIMI are highly problematic. Amongst other things, the fact that ARMING_CHECK is disabled by FIMI is a particular problem.
Rolf
I just received new Manta and it has GPS module together with compass (QMC5883). I checked the position of this IC and the arrow missing there should point forward. But COMPASS_ORIENT parameter was 2. So, I changed it to 0, calibrated the compass, but this value has been set again to 2. Please, is this a normal behavior? Should it be really 2 (Yaw 90)?
Is this the gps from fimi? Mine had a 6 wires but no compass in the gps
Probably. By default compass orientation is learned during the calibration process. Compass_auto_rot parameter.
According to the official explanation of Ardupilot, the compass installation does not require a direction. You only need to recalibrate the compass after installation. Under normal circumstances
HI
Maybe the latest documents provided by FIMI can answer your questions
Document Version Update Notes:
Manta_PNP-FC Special Instructi ons V3.0 Updates as follows:
(1) Modified and corrected item 2 regarding the ground stati on parameter setti ngs for
SBUS receivers.
(2) Added opti mizati on descripti on for the high-definiti on video transmission interface
for the V2 version flight controllers (SW).
(3) Added usage method descripti on for the V2 version GPS (black circuit board)
electronic compass.
The document link is as follows:
Thank you all for your inputs. So, I will let COMPASS_ORIENT=2 after the calibration. Also the information in instructions V3.0 is interesting: During compass calibration, ensure that the aircraft 's cockpit is closed. Probably due to additional two magnets. The USB cable then can be pull out through the air intake ![]()
1 Like
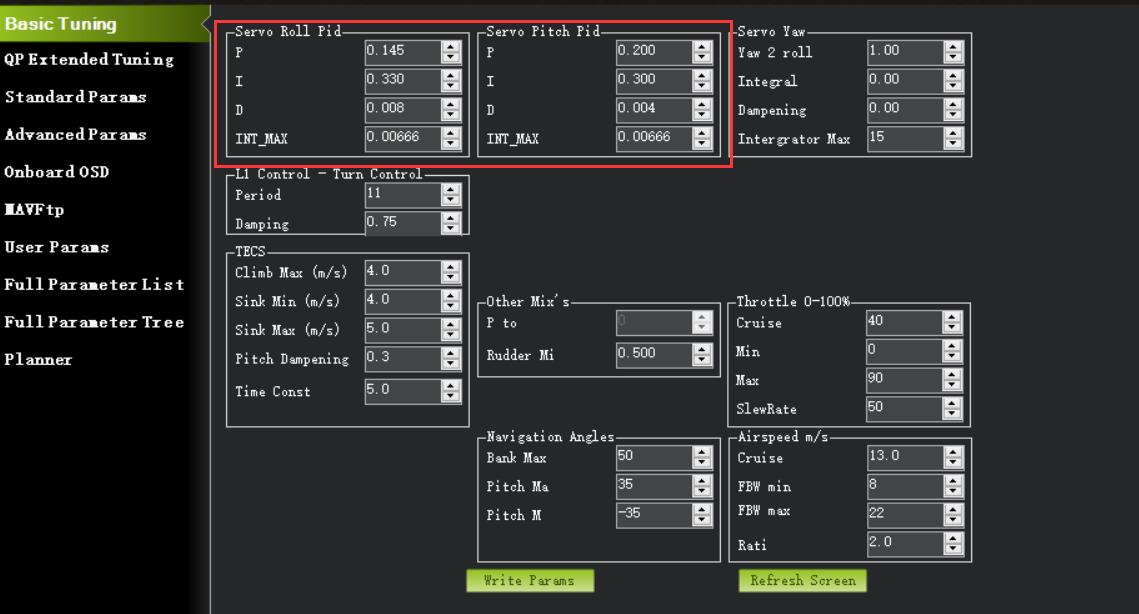
I noticed that your Manta does not oscillate at all on the Roll axis. I have been trying to get mine to fly like that but I can not seem to get it to stop fluttering. It wants to roll left and right about 2 to 3 degrees and then steady out for a second or so and then start the shaking back and forth. I have tried to Autotune the roll but that doesn’t seem to make any difference. I would like to know what your PIDs are for fixed wing flight. I am thinking that maybe the D needs to be set higher because Autotune only adjusts the P and I.
I added a digital radio to Manta and flew the AUTO route in FPV mode. I adjusted the PID while watching the FPV screen, and finally found a more suitable PID parameter. This parameter can control the roll swing amplitude very well. The actual flight experience Much better than the original,But it is difficult to prevent manta from swinging at all in wind speeds above 6m/s .Hope it helps you!
I will try those PID settings. I have replaced the stock Elevon servo horns with longer ones and put the control rod into the fourth hole out and have noticed a much quicker response in the Roll correction. The stock servo horns have the control rod too close to the servo shaft and will not let the Elevon move far or fast enough to be able to correct the roll with out the constant rocking back and forth. FIMI probably did this to keep inexperienced pilots from over controlling the plane. I may even move the control rod out one more hole to get more travel and speed on the Elevon.
Hi James,
I don’t think my PID values will help you much, the linkages, the trim values and the servo settings, the aircraft weights and the intended cruise speed are often too different for that. But I post them (parameter-file) here of course anyway.
nachupdate.param (24.5 KB)
I have performed autotune twice with little wind. Roll PIDs are still in need of improvement for me too.
Good luck
Rolf