Allow me to open a thread on new 3D printable dual motor tailsitter from Eclipson which will be released this week. Will follow with build and flight pictures/videos.
They have been actively designing various 3D printed planes (many are good for AP plane or FPV platform). New to VTOL, I recommended AP here.
The design is optimized for light weight foaming PLA material (LW PLA), which cuts weight down to half than regular PLA.
My test build uses ColorFabb LW PLA, 800g AUW with 1500mAh 3s, Sunnysky X2212 1250kv motors, 8x4.3 prop. Matek F405 Wing FC + BN880 GPS/Compass, ArduPilot 4.1/4.2Dev. In the process of tuning with learning.
Why 3D printed?
Quick and low cost to build. It is not bullet proof like foamy planes, if seriously damaged, print another instead of repair to make it heavy. I keep crashing during tuning. Will be flying new #3 build tomorrow.
Easy to build. Print and glue. Sanding not needed. Coffee table ready.
Hi Satoru,
Thanks for sharing this design. One big problem with tailsitter is there is no dedicated plane or drawing available. I follow your progresses with interest in the tailsitter dev thread.
Some remarks: The plank wing is the right choice but the wing ratio of 4.4 is probably too large.
Also control surfaces are a little small, 35 to 40% wing cord is better. recommended control surface throw is not enough as you need ±45°
Recommended servos are too small, something like 30g, 0.1s/60°, 4kg/cm good quality flybarless helicopter digital swatch servo would be a reliable choice.
Where is the CG ? this is the most important, more important than PID tuning. The right CG location is the more backward that allow the plane to fly safely. Moving the CG mm by mm search the point where your plane become unstable, this is done. This is easier to write than to do. If you test in manual mode unstability can be observed by divergence of the pitch axis, I mean if you put your plane in a dive it will increase itself the dive and eventually crash . Since rev. 4.1 Plane autotune gives a much better tune that allow to cope with a CG a little backward (but forget manual mode).
Hi @losawing, thank you for your interest, and really appreciate advices. I updated the plane designer to join here. He is willing to upgrade/improve as we learn more while initial one is released. (I am test builder/flyer).
CG is at the small mark on the bottom (red line). This wing uses tailless wing type airfoil but I do not have info on % of MAC, from neutral point etc. It is true it is on the safe side now.
I had a chance to have tune flights today, will have tomorrow, too. I will move CG back together with plane tuning. Elevon deflects probably 40 deg, will check log whether servo is deflecting to the max or not.
My build is light, 800g or so with 20dm2 wing area, may make sense to print another with heavier (and steadier) PLA with stronger/faster servo.
The key point is the balance along the pitch axis. We want the wing to be balanced with only minimal flap deflection whatever the lean angle. The most difficult lean angle is around 45° so next time you test your wing, hover it around you at every lean angle and observe control surface deflection. if they deflect steadily upward by more than 20° this is bad because you want the rest of elevons deflection to be used to control the plane roll. This is where the CG is important, the more it will be backward the less elevons deflection will be required to balance the wing.
For CG position calculation you can use the ecalc CG calculator. you can begin with 5% static margin. it is better to make the simulation also with the small fuselage. 5% would not be a problem in any fixed wing assisted mode but beware if you test manual mode, this is already a small margin.
I don’t think heavier is better except maybe in gusty strong wind but in that case to add a ballast or a bigger battery is possible.
The question of airfoil is still open. We need an airfoil with stable Cm. A stable Cm over the whole alpha range allow theoretically to set the CG with minimal margin.
Thank you @losawing for advices. I ordered faster heli servos to try. Had a tunings chances during weekend, busy to look back logs now. QHover seems better. QLoiter seems ok, no need further tuning. Plane is tuned, Started to try new Q_TAILSIT_THR_VT param as well.
Looks like log is not showing servo channel saturation. Thanks for valuable advice to where to look at. I think I did a few horizontal vector flights, look for them and check how elevons are deflecting.
We had a discussion which mode to take off at maiden. I am thinking QStabilize is better as it gives more control, avoid gentle power up, rather apply quick to take off. I searched docs/discussions but cannot find strong recommendations.
There are other testers failed to make initial takeoff. They did not have log, only video so we cannot conclude.
I built ‘testing gimbal’ to ease the risk. 2mm steel wire hook/1m carbon pipe attaches to near the CG point. Attachment part is reusing ‘airspeed sensor attachment’ part included in the design. Better to ask somebody to help, but I was alone that day, held pipe together with TX. Seems to be working ok.
That’s really cool, as long as this is true you can not loose control.
The first video do not show high lean angle, did you test ? to see if there is still no saturation.
I also always look at the balance in fixed wing mode.
I cant really help, 99% of time my preferred modes are qhover and qloiter because the flight controller make a better job than me in controlling altitude and a tailsitter does not like to go up and down. From plane 4.1 you can set different values for max up and down velocities. Q_velz_dn=150 and Q_velz_max=500 might give you a safe descent and the throttle boost necessary to take off while using qhover mode.
Thanks again for valuable advices. I still cannot locate flight with high lean angle. Second day flight was cut short as I broke prop on failed take off, also swamped by so many logs… Better to video all flights together for better indexing.
Got faster servo and started to build another.
Eclipson has posted build video. The designer is travelling now and hard to get his input now. E-VTOL-1 build guide. 3D printed VTOL - YouTube
Had a chance to do more test flights.
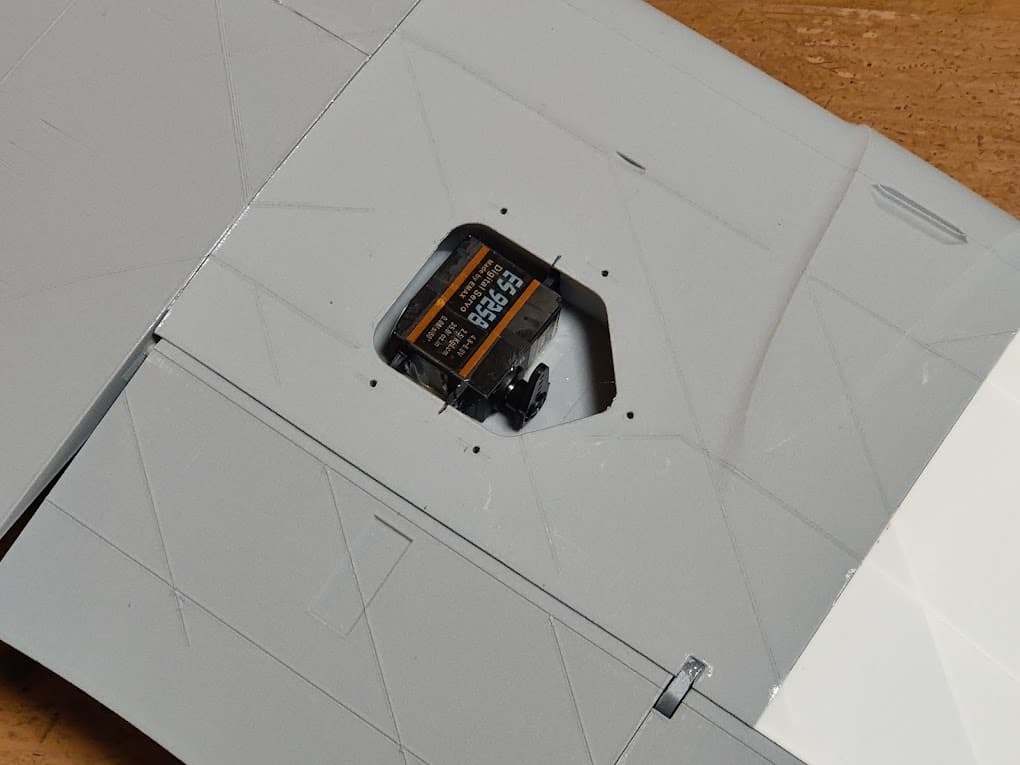
Found elevon deflection (at least) is not enough. At quick glance of logs shows deflection saturation during hover horizontal moves. Linkage has room to improve first, it is not deflecting to max possible angle. Will improve with longer servo horn on this setup, also already building another with faster/stronger servo.
Interesting to see this elevon throw saturation really affects plane attitude. Occurs only max forward pitch is applied, not backward. Needed to apply throttle to recover.
I will look into logs further to see this occurs during descend, unexpected roll in wind etc where I feel not good during flight.
It is good that plane is still stable in this excess pitch attitude. Hope tuning is helping here. In horizontal FBWA flight, elev stick full up has no issue.
Other than above, changed SERVO_RATE to 70. Will set up faster on digital servo.
hi Satoru,
I am very pleased to see that hover control is better than previously. As written in the Eclipson web site, this is a challenge.
Are you sure you cant move CG more backward, 2 mm could make all the difference. My advise is to prepare some 5g lead pieces and to make flight tests adding them one by one to the rear.
What value do you have for mixing gain ?
Is pitch FF parameter already tuned ?
I saw video that shows wingtra tailsitter making its landing approach on its back. I suppose that for some aerodynamic reason the balance need less elevons deflection and this might be a question of airfoil Cm at high lean angle.
But if you want to get the same control belly vs back you can simply modify motors thrust line.
Yes, this challenge is fun!
I have not moved CG back but feel still has more room, next thing to do for sure after linkage fix.
Yes, FF is tuned with Henry’s advice. q_a_rat_pit_ff = .2, roll and yaw is the same now.
It is true this plane does not have symmetrical wing, inverted may make better descend during hover. Will also try. Need to wait a few more days for calm weather. Current issues are 1) elevon deflection saturation during horizontal hover move, 2) instability in fast descend in QHover (Q_velz_dn=150 helped), 3) Still see unexpected yaw/plane roll against wind. Log confirmed #1, #2 both caused by max elevon deflection, spending time to find #3 in log now.
Another video and log of the flight on the same day. It was windy at 2-3m/s, struggled to descend in QHover. Showing Elevon is deflecting max frequently. Tried QStabilize which I can control better but it also deflected max and not enough. Waited wind to calm down a little and landed somehow. https://drive.google.com/file/d/15pWsGMgf2lY_M6VhuTs8vtWeV0p6n2Kv/view?usp=sharing
An advise from @iampete
The other thing is to increase your throttle mix params, that will allow the vehicle to increase the throttle automatically if there is a angle error. Q_A_THR_MIX_MAN and Q_A_THR_MIX_MAX, the max value is 2. I have 0.9 for both.
An other trick is to increase q_a_rat_yaw_I and Imax parameter values. Plane roll stability against wind gust might be improved.
Extended servo arm a little to give more throw. Advised changes improved flight characteristics. Thanks again. QHover is getting comfortable to fly and descend now. Started transition testing.
May note plane color change. Crashed and rebuild after seemingly servo lock after setting servo_rate to 70 together with servo arm extended for 2 holes. Feel pushing this servo too much.
Another build with stronger/faster servo is getting ready. Will fly soon.
Set Q_A_THR_MIX_MAX and Q_A_THR_MIX_MAN to 0.9, also increased q_a_rat_yaw_I a little 0.18 → 0.2.
I see AP is applying additional throttle ‘kick’ when attitude is lost and I do not need to apply throttle manually much.
I do not see unexpected yaw change in wind.
This flight is in 2-3m/s wind, still need caution to fly but better. It lost attitude after transition from plane, this plane is not symmetrical and is more stable to be slightly face top side to wind, than bottom side.
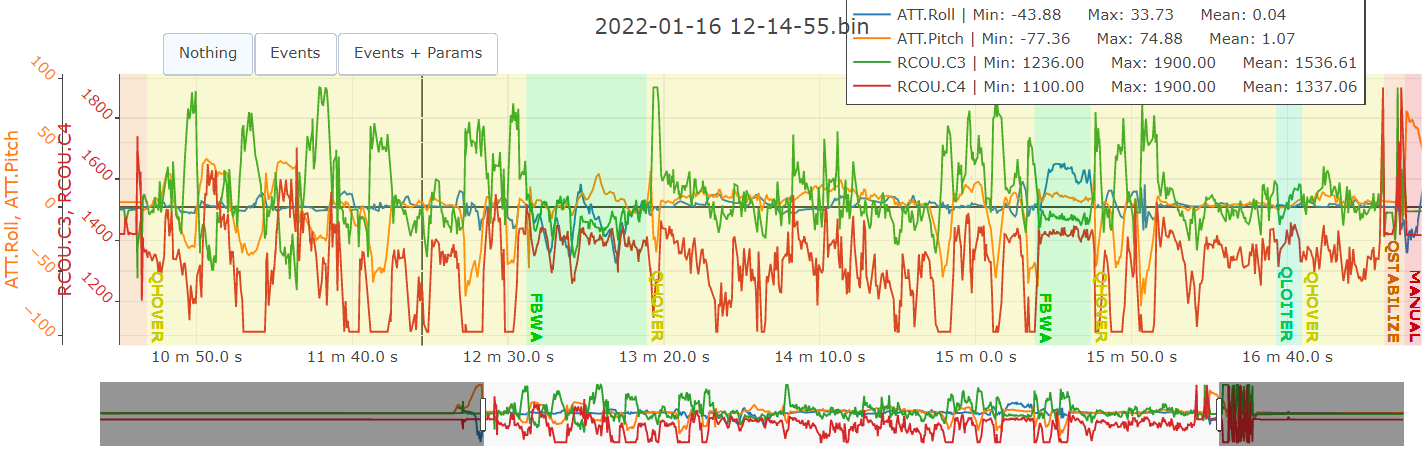
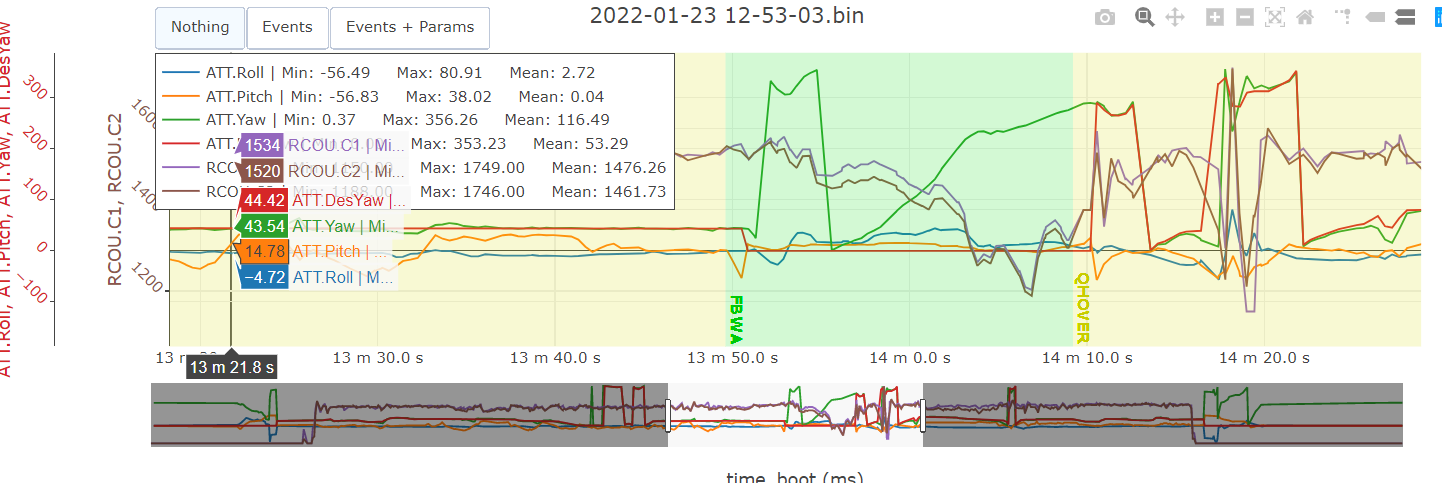
Started transition testing. Noticed plane yaws left after transition from QHover to FBWA. ATT.DesYaw stays 0 while ATT.Yaw raises and looks like differential thrust C1/C2 is trying to compensate? I see this in every transition. Need to look into further. CG is moved back a little, still flyable in MANUAL but need caution not to stall, turn hard.
thanks for this detailed report, It will help people interest in AP tailsitter. I am very glad to see your project progresses.
You probably have a small thrust difference between motors (or a wing heavier), this is something very common.
From my side I use to set yaw I and I max up to 1. When I fly my tailsitter side wind at elevated speed (5 to 10 m/s) I can see improvements.
About hover control belly side VS top side, I am currently making a new dual motor tailsiter with Eppler 472 airfoil. This is the first time I will test a symmetrical airfoil. If you look at Eppler 472 polar you will see a high intrinsic positive Cm at high alpha right before the stall. I think that the section behind propellers are not stalled but get airflow with high alpha. So I hope the positive Cm will help to balance the aircraft.
Thanks again for advices. I will tune plane side as well. Also will play further on I and IMax. 5-10m/s is impressive! Few others are starting to build this, I want to give good direction.
Interesting airfoil it is. Looks like full scale Extra uses this? Have not seen much in model, only found it is successfully used in CL combat plane. Constant Cm airfoil reminds me some heli rotor airfoil but I am not sure exactly which one.
I’m newsby in the Tailsitter environment and I’m iteresting by this project
What is the total time for print all the parts ?
I don’t know if it’s interesting but I share my experience
Last time, I print the motor fixation with the TPU 95A and I’m very very happy about the result, for me it’s very interesting (low virbation and very-very strong)
Maybe some parts who need to support shocks ( ex: end of the wings, supports in contact with the ground, noze) are better with this type of the material ?
I never test a printed plane, opinion about the quality of the flyght ?
Servos
After test different type of the servos I found the servos series KST very good, exemple, KST215MG
Other sugestion with best raport / quality price ?
Hi! Great to see you have 3d printer, ready to try this. I use TPU for tires, wing holding bands and more.
Eclipson does not publish printing time, I loaded all parts and slicer says it takes 1 day and 23 hours to print. I crashed #3 build last Wednesday, and #4 flew Saturday. Number of parts is less than regular plane and quick to build.
This lightweight LW PLA needs to be printed one at a time because its stringing is not controllable, I have large sized printer (Sidewinder) and print 2 parts together. If you can print TPU ok, LW PLA is very easy material. Of course this E VTOL can be printed with regular PLA.
I fly only printed planes for over a year so except high performance rigid glider. Printed planes gives quicker build, better finish (slippery surface) at the cost of crash resistance. You can try Eclipson model A free version to feel how it looks like. I also publish small 200g 600mm ArduPlane capable wing here.
I ordered KST215MG you have advised. I am not so familiar with faster/high performance one.




 . Since rev. 4.1 Plane autotune gives a much better tune that allow to cope with a CG a little backward (but forget manual mode).
. Since rev. 4.1 Plane autotune gives a much better tune that allow to cope with a CG a little backward (but forget manual mode).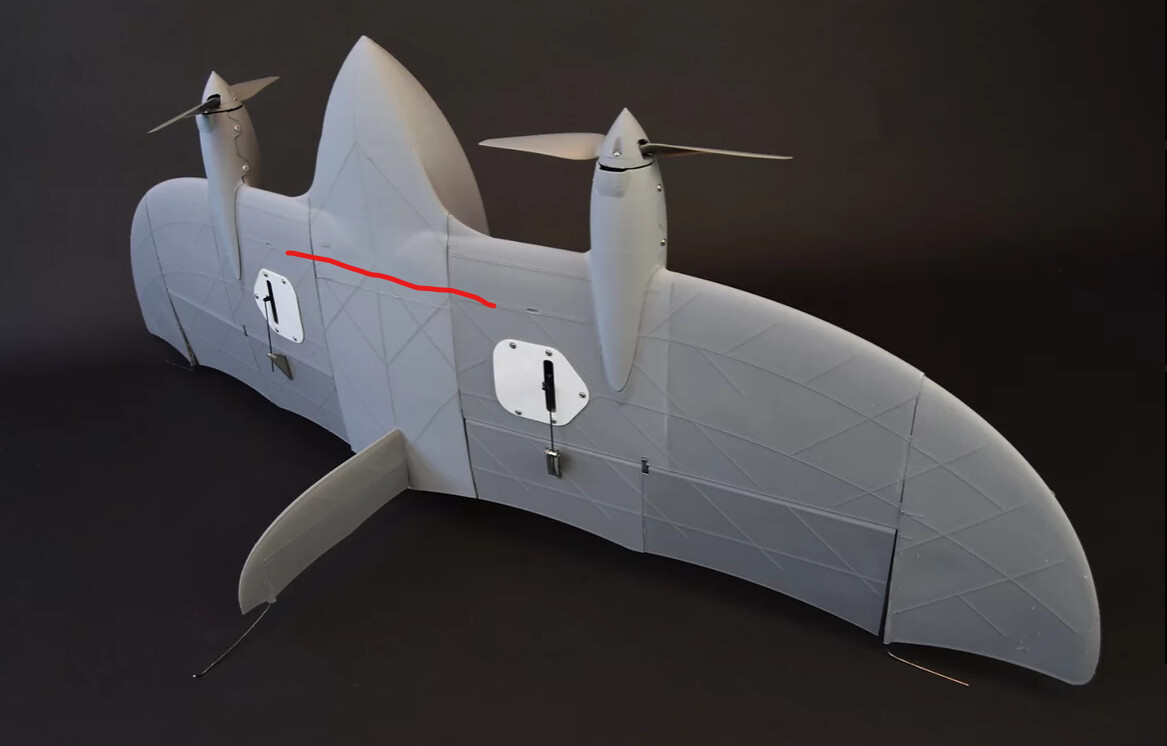









 I use TPU for tires, wing holding bands and more.
I use TPU for tires, wing holding bands and more.