I’m a complete newbro with Arduplane. Would you mind helping me find the right way to get that thing airborne? I bought the Manta, too and the F405 VTOL FC.
Soldering is ugly but should be fine. I didn’t find a way to send you a private message otherwise I’d have done that.
Problem as of right now is that I can’t get that thing to run in Arduplane. All seems to be working, I basically stole all the setup params from a YT Video (Ranger T1 VTOL build from Painless 360), only adapted them to my layout of Servo connections…
Elevons are twitching, swivels are moving sometimes, too, all motors have been spinning but nothing is how its meant to be
I actually found this thread and the forum only after the YT Video and I didn’t discover the Gdrive before.
Found it, will certainly try it! Thank you!
Edit: It’s for the FC Version though. Hope it works with the VTOL FC aswell…
Edit2: Okay that worked like a charme! Obviously needed to match channels to what I have soldered here but other than that, plane seems to do what I’m asking for when in manual mode.
Now I need to figure out how to arm that thing whenever I want so that I can test motors and start reading into the different flight modes because it does weird stuff when not in manual mode (might be because the FC is flapping about and not mounted inside
Question If you see at Fimi the picture of the FC. You see the analog signal output interface on your left and analog signal input interface on your right. Where i put the analog VTX and where i put the analog camera? Because i have now the VTX in the left and the camera in the right but my gogle can’t find. Or must i use only one for the VTX and put the camera in the VTX?
Huh. A assumed when you said you were using a different parameter set that you were using another flight controller. It would have came with the default parameters.
Thank you Satoru. So the left is for the VTX and the right is for the camera. Exactly how I connected it. Now I will investigate further why I don’t get an image in my goggle
After a few flights and parameter and log evaluations, I come to the following conclusion:
The default parameters of FIMI are highly problematic. In particular, switching off the preflight checks ( ARMING_CHECK,0) against all Arduplane recommendations is highly unsafe. Through @Satoru_Sasaki’s link I came across Oscar Liang’s page. Oscar tops it all off by recommending to take-off immediately if the GPS has a lock:
“GPS Lock: Before take-off, make sure the GPS has locked on, indicated by a rapidly flashing blue LED on the flight controller. If it’s not locked, the return-to-home (RTL) feature won’t work. You can still arm and fly without GPS lock.”
To make such unsafe recommendations about fliying Arduplane is a strong piece of ignorance.
I don’t begrudge many money YT-Clicks in principle, but FIMO should have better asked Arduplane for commercial support instead.
The gps without compass and having the wires as if the compass was present it’s a bad joke.
Beside, qloiter would be the correct mode instead stabilize.
I bought this plane as well - pnp with FC and ESC. I plugged in the battery and USB at the same time, and I might have a short circuit somewhere, and I think I damaged my ESC as I saw smoke coming out of ESC and battery. Might be due to a large spark, but I smell and saw smoke. I was testing with a 2S lipo, maybe that was the issue as I did not have 3S with XT 30 connector. I have some experience with Arduplane, INAV, quads, and planes, but this is my first VTOL
Then, I bought a new ESC. I recently wired the whole thing up with a compass and Matek GPS. I double checked my motor direction and prop direction, CG, etc.
When I tried to fly this, my Manta just flip over.
Can you please help me to find the cause? I have uploaded the log. I have updated the firmware to 4.4 with the same parameters from FIMI Manta.
Mine flight once, and the esc was I don’t know why - damaged and there was no power enought to the manta lift off.
I sent to fimi and I’m waiting a replacement.
Had you had checked the motor orders in the motor test tab ?
yes. When I do motor test, Motor 1 was top right motor (looking at the plane from the top). Motor 2 was top left motor. Motor 4 was the motor in the back.
To wire a 4 in 1 in ESC and the resulting setup can be a bit confusing. I think that ESC ship with Manta is not that good.
I always tried with channel 2 reversed in Mission Planner, and not reversed in the radio. I think this may be the cause. I am not sure. I will again again with Pitch reversed in the radio and not in mission planner. I am not sure if there is a difference, but I should follow the manual - reverse in radio, and not in mission planner.
A quick clarification question, if I go to Motor Test tab, and test all motor in sequence, should the front right motor spin first, then the front left motor spin, then the last motor in the back spin? What does sequence mean? Should the front right motor spin first, then the back motor, and then the front left motor?
You should upload .bin log file instead of .log file. I checked both files, can see params but log analysis tool does not show detail with log file, cannot see how it behaved.
Looks like you are not sure on motor order? Since Manta is small, you can hold it by hand, arm in QStablized mode, gently apply power and observe how it behaves. Once Manta is self stablized agaist pitch and roll, you can check RC control is working fine as well.
Motor order is motor1 front right, motor2 right and motor4 rear. I can see you have set them in the log, but cannot know which motor they are connected.
I agree with @Rolf Manta is far from complete and not safe as PNP. It is a ok built kit with starting point parameters to tune. At least it is good kits have same build, motor and servo so that stability parameters can be common. Mine has SpeedyBee F405 Wing, 20A ESCs, matek m8q-5883 GPS. Fuselage space is tight and I have not fixed everything well yet, lots of tape. AirSpeed is installed but not enabled yet.
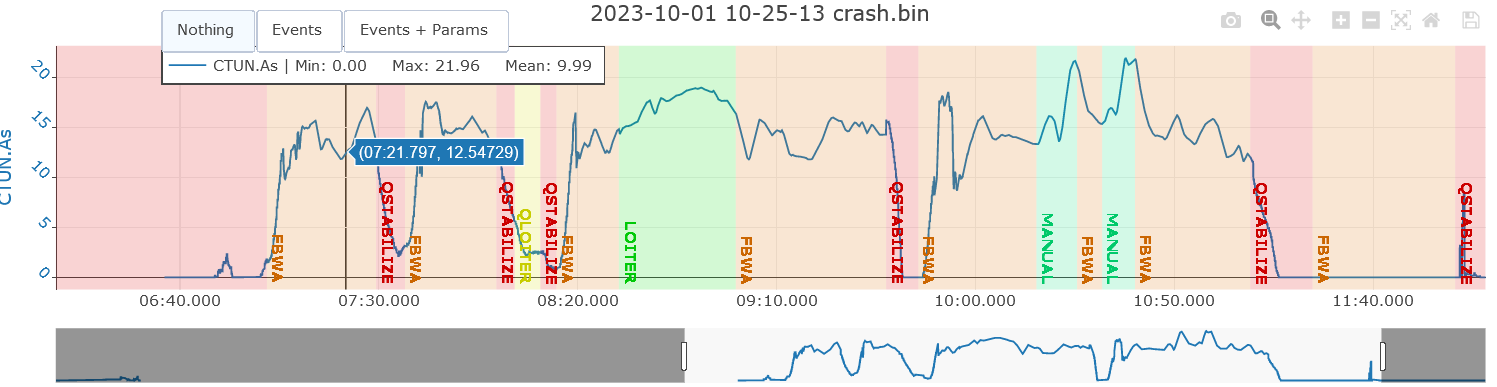
This is the third flight after checked stability in QStablize mode well and tried a few transitions. Switching between QStabilize and FBWA, QLoiter in the latter part, a bit windy 2m/s or more. Stabilization is a bit too much, I can see vibrations in both Q and FBWA.
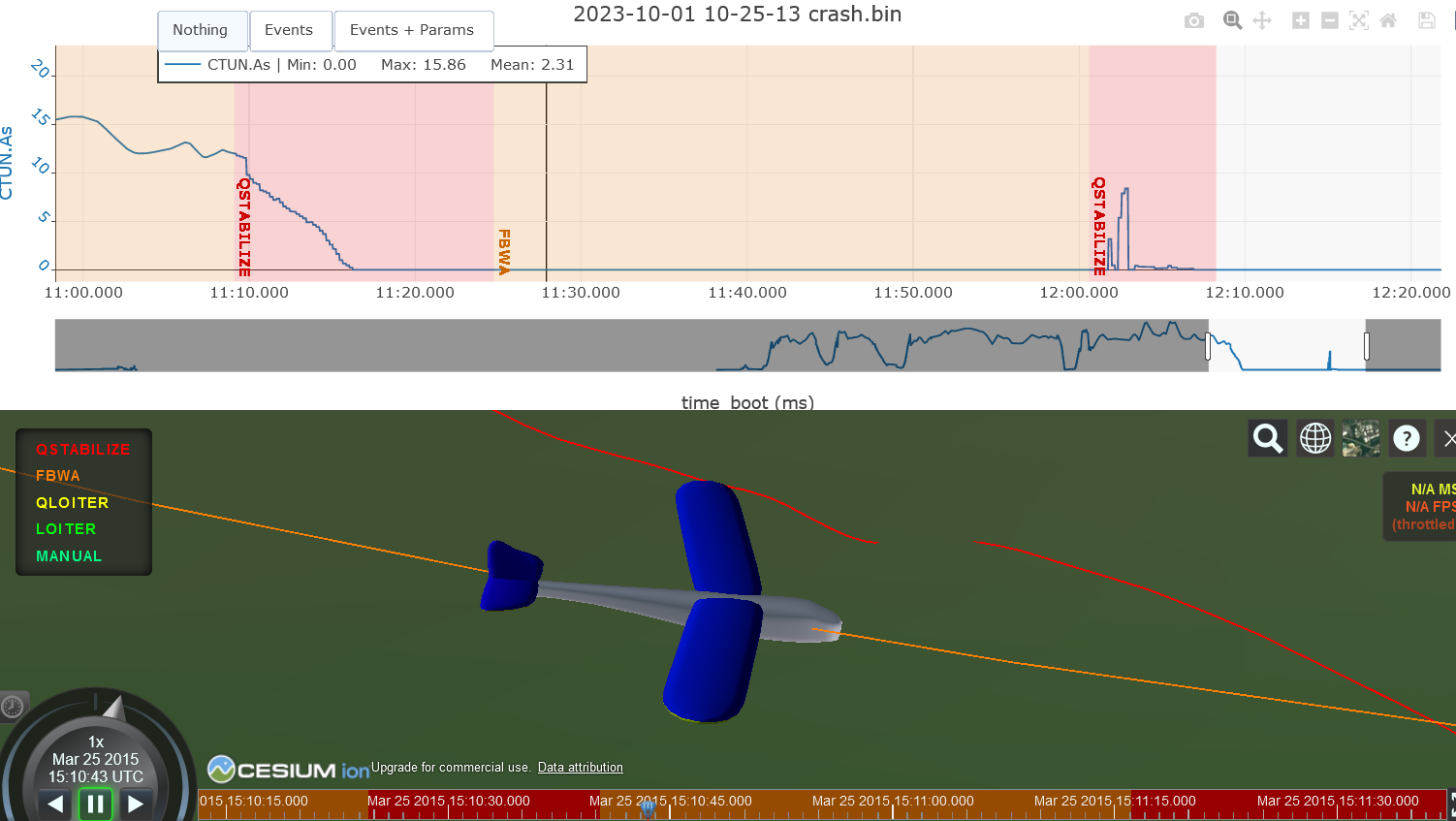
After a few flighs, Manta got into a state messaging failing to transition to FBWA, repeated to try transition. Tried to transtion back to QStabilize, flipped and crash. I do not fully understand what happened in this log
Fortunately damage was minimal. One motor arm is bent but was able to straighten using vise and pliers.
Good that you were able to repair the damage.
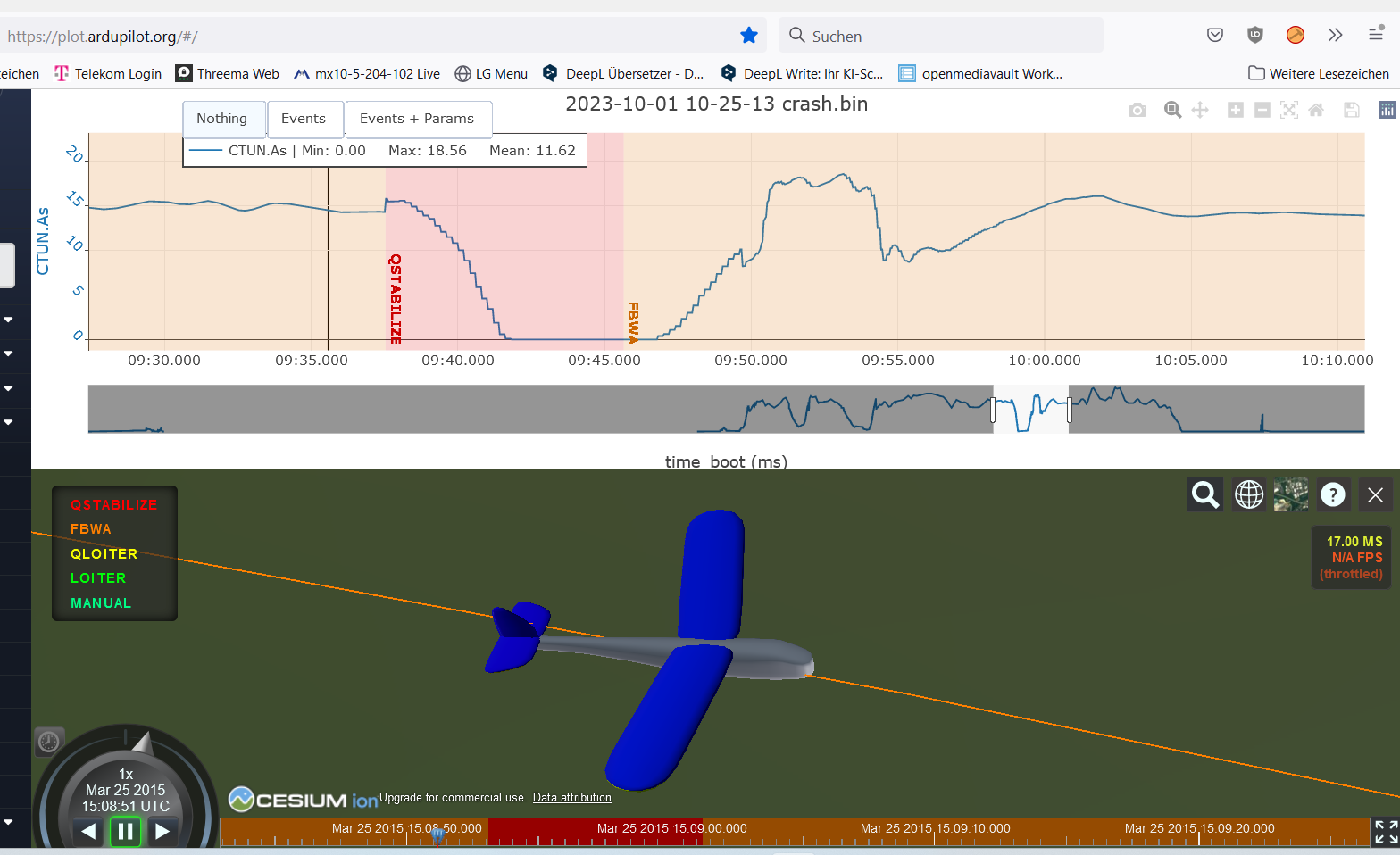
I suspect that the chain of causes for the crash begins with the fact that no compass is installed.
Therefore, the calculated airspeed is always set to zero when the aircraft is objectively moving backwards (in Q mode), but the missing compass causes the heading to point incorrectly backwards, which logically sets the airspeed to zero.
It’s best to check it out for yourself at UAV Log Viewer.
Why this was not recognized during the last switch and the synthetic airspeed remained at 0 I cannot say. This goes beyond my Arduplane knowledge. However, I am sure: With compass this would not have happened. I think the compass is even more important than an airspeed sensor.
I have a few flights behind me now. The aerodynamics are great, at least a compass belongs in it to be able to start safely in windy conditions or to fly in a Q-mode and from the manufacturer the parameters are partly a disaster.
I realistically expect a safe VTOL flight time of 30 minutes with 3s 21600 LiIons.
Rolf