As part of a different project, I’ve built a new APSync for the Raspberry Pi. It’s based on the latest Raspian “Buster”, so should work with all models of the Raspberry Pi.
There’s a few minor issues (see here, plus there’s no DFLogger), but mostly works very well.
My build scripts are over at Github, for those that want to build it themselves.
@stephendade Thanks for sharing the image. I tried flashing it on a Raspi 4B. Is this apsync image a command-line only version of Raspian? I am not seeing any GUI even after logging in.
Thanks! I was able to establish MAVLink but the connection is very erratic. It takes a moment for the link to connect and then it says Link1 down intermittently. Also, I’m getting a lot of junk data. I have the advised baud rate of 921600. Any idea what the problem could be?
Also, what is the user name for apsync? apsync & apsync isn’t working. I am using pi & raspberry as the user login details for now.
hello,i used the software and the communication between flight controller-pi3 A±desktop is good
right now i have another problem,i want to connect to the wifi from my pi but i cant ,is this a pi problem or it happens because of the ap sync software??
I tried to make my own compilation with the files and it has been impossible for me because of lack of memory in Raspi-Zero
It is appreciated that you have provided an image that allows you to use Pixhawk with Raspi-Zero would it be possible to compile some more recent version to see if the problem is solved?
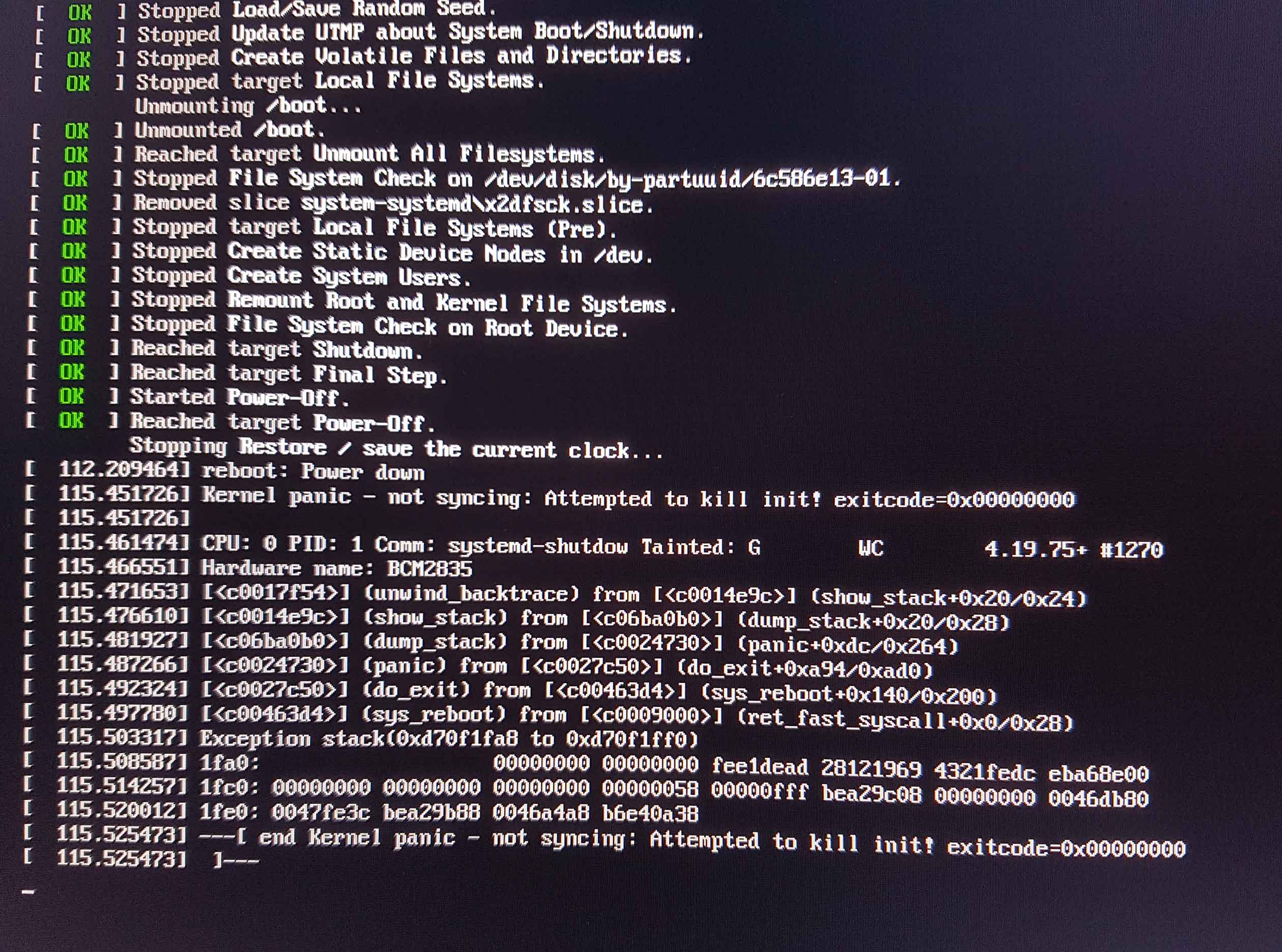
Not at all, I created a complete image. Using main1.sh main2.sh and main3.sh but I still get the same error in raspi-zero and in raspi 4 the poweroff problem. You also have to enable chmod for .sh files in some parts Otherwise your collection is excellent. On my own I have not been able to make him walk with the instructions of ardupilot. Especially the part of the mavlink-router
In theory, yes ( I have done it only on a Jetson, not a RPI)
But why aren’t you just using the LAN port in parallel to the apsync wifi access point to access the internet?