Settings in MP will not significantly improve the positional accuracy. You can try manually setting which satellites systems are used with the GPS_GNSS_MODE depending on what’s available in your part of the world. You can also enable SBAS. By experience this has made little difference at least where I’m at.
I live in the UK London. Is there a anything I can select in GPS_GNSS_MODE which would be more suitable for where I live & how to I enable SBAS? Thank you
Well as usual there is a Wiki with some information. I would not expect any better positional accuracy with the hardware you have no matter what you do. The fact is navigating on the ground is not trivial or cheap. What you have, and I have, is hobby grade stuff with hobby grade performance. Maybe you should be looking at obstacle avoidance instead. However, it’s a similar situation with regards to hobby grade stuff and hardware that really works.
http://ardupilot.org/copter/docs/common-gps-how-it-works.html
I am about to buy a 2nd RTK system for an application at work. I was thinking about the Sparkfun ZED-F9P but they are backordered with no indication of when they will be back in stock. I see that Ublox has the C94-M8P kit I like I already am using for just $399 now! Since I know how to make that work, I think I am going to go with that. If I do, THIS TIME, I will make better notes of everything configuration, software, and hardware that I do to set it up to help anybody else. To that $399, all I will add are two 915 MHz LoRa boards from Adafruit, a power supply for one of them, two good 915MHz antennas, two better GPS antennas. The total cost will likely be about $600.
1 Like
I tried changing SBAS & GPS_GNSS_MODE but with no different results unfortunately.
Like you said with hobby grade hardware like we own there is a limit to performance.
I think my best bet is to get the Here+ RTK as @ktrussell said it doesn’t require any in depth programming, soldering etc so it’ll be easier for me.
Now I’m facing the issue of maneuverability of the RC Crawler I currently have. If you have any good ideas of which one I should purchase please let me know. I was looking at the Dagu Wild Thumper 4WD 75:1 Gear Ratio. That might be an option for me & it’s reasonably priced.
would love to see a blog post or a build thread on your RTK set up, very interesting.
Yes, either a chassis like that or a 4 wheel steer crawler. Of course the crawler would still have a turning radius just tighter.
I’m looking into purchasing this:

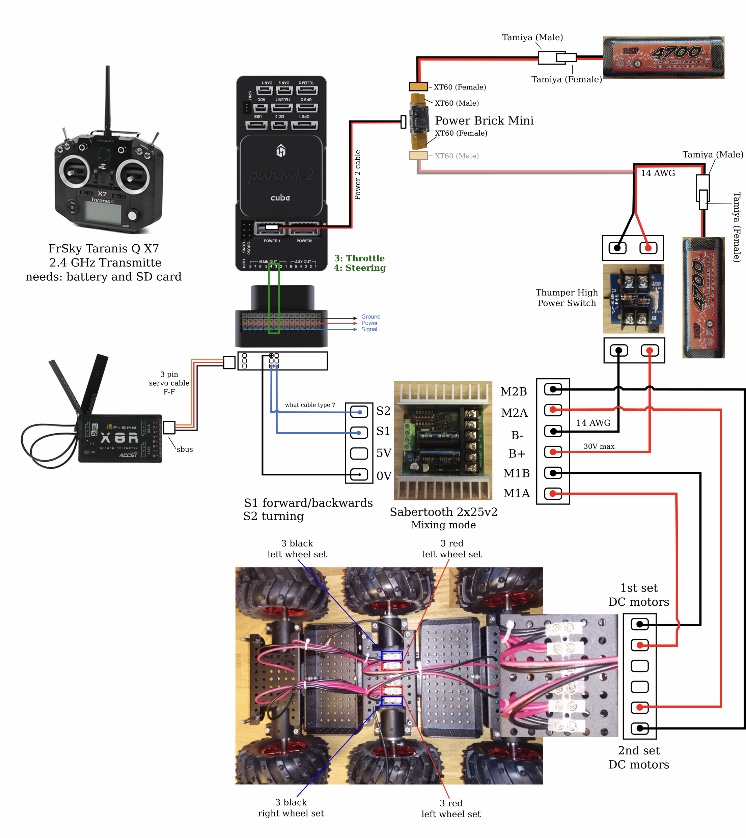
Wild Thumper 4WD. This says it doesn’t come with the wheel encoders. As you know my current setup is running from the pix to the ESC of the rover. Will I need anything else to buy to get this working with the pix?
Are wheel encoders required to run between the motors of the wild thumper & the pixhawk?
Just found this. Looks complicated. Do I need to buy all these parts to get it working with the pix?
No, but you will need ESC’s . You could use one of those 2 channel controllers or use 2 ESC’s similar to what you have now in your truck. Hobbywing makes decent ones, I used one in my previous truck . You don’t need wheel encoders but it might be useful if you could add them. They can supplement GPS for positional estimation. I don’t have experience with this but have read some accounts on here and there is a Wiki entry.
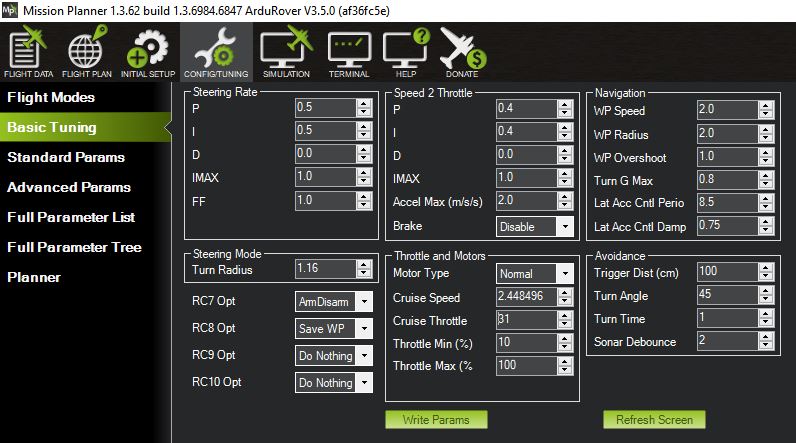
Hey Mus-I finally got out today for a thorough tuning session and after going through Throttle, Steering and Navigation the performance improvement was dramatic. I’m not suggesting you copy these parameters and some of them are very vehicle specific anyway but I would be interested to see what you have with a vehicle similar in some respects. The 4 point Mission I was doing to tune L1 was almost spot on the Waypoints even after repeating the mission ~8 times at up to 3m/s.
Note: The Turn G max value was determined when the vehicle rolled over while steadily increasing the throttle driving in a circle. That was fun…
.
2 Likes
That’s great news Dave glad to hear your rover is performing better with the new settings.
my rover is doing well but sometimes the EKF is going in the red and im getting bad AHRS sometimes. anyway to fix this?
Also I found another small rover on amazon. Wanted to hear your thoughts on it. Looks pretty basic but similar size to the wild thumper and much cheaper:
Engine Specs:
Power Supply Battery: 3.7v 18650 * 3 (NOT included)
Voltage: 12V DC
RPM (Revolutions Per Minute): 320 rpm
Diameter: 25 mm
Shaft length: 9.5 mm
Weight: 180g
Maximum effective point: load 4.0kg.com/235rpm/2.5W/0.58A
Stable current: 4.8A
Current: 0.55A
Height (without shaft): 68mm
Shaft diameter: 4mm
Torque: 7kg.cm
Max power: load 7kg.cm/215rpm/3.1W/0.65A
Also not sure about which motor controller to purchase that’s suitable for the rover and what would work best with the pix.
Bad AHRS means it’s not happy with the position estimate. This can happen on start-up if it doesn’t have good GPS position info yet. If that’s the case and it goes away after a minute or so it’s no problem. I don’t think it’s related to the compass but you do only have one enabled right?
I think you will get what you pay for with that vehicle. It looks Toy grade to me. How fast do you plan on running the vehicle during a typical mission?
Yeah your right it does go away after a bit of time but during driving it manually when I turn left or right all the way like doing a doughnut it then comes back up,
Yes it is toy grade lol it’s says it can go 320rpm but I’m not looking to take it past 0.5 m/s
All those chassis including the Wild Thumpers use 25D brushed gear motors with 6 or 12V rating. The wheels are fixed to the gearbox output d-shaft with a set screw. So all the forces that occure during driving/turning are taken by a brass sleeve bearing and a small pin on the opposite end of the output shaft. The brass bearing and/or the pin wear down quickly, especially if the rover is heavy. The brushed motors also tend to fry if they stall for to long. And replacement motors are surprisingly expensive.
Rather than going for what I’m thinking of what would you suggest would be a better option for me? Thank you
I just wanted you to know what to expect.
There are some robot chassis that use bigger 37D motors with gearboxes and they have 6mm output shafts instead of 4mm, but I never used them, so I can not tell you anything about the quality.
Lynxmotion A4WD2 and A6WD2 use 37D motors for example, but they are not cheap.
yes ive seen these they look really good. around £200. but on the youtube videos they really sound loud, and I mean loud. that’s why I thought id continue looking for other options, but yes they are in my sights on what to purchase
There are a lot of gears turning, that will never be silent😁.
