What makes this Aion robotics rover better than the Lynxmition?
If I go for the Lynxmotion what kind of controller will I need? Is the Sabertooth dual 25a an overkill for this or could I use something less expensive?
What makes this Aion robotics rover better than the Lynxmition?
If I go for the Lynxmotion what kind of controller will I need? Is the Sabertooth dual 25a an overkill for this or could I use something less expensive?
As I mentioned you could use Brushed ESC’s for RC Cars/Trucks similar to what’s in your current truck. 2 of these dual units from Hobbywing would work:
I was thinking of buying a duplicate ESC to the one I’ve got like you mentioned & somehow modding my current rover to operate like a skid steer. The suspension on this rock crawler is amazing & can handle going over pretty much anything whilst maintaining a straight path.
Not sure if that’s possible tho unless I attach 4 motors to where the wheels are
Impractical to attempt a mod like that on that chassis. If you don’t really need zero turn look at the 4 wheel steer vehicle options. In fact I was looking around for a 4 wheel steer kit for my vehicle. There are some but not for the model I have.
It’s a good point about the suspension on these trucks. The suspension on most of those skid steer chassis are the tires… Ground clearance is a consideration also. At least for me it was. My previous Basher chassis Rover had much less than this one and would bog down in tall grass. I even stripped a wheel hex drive that way once. I happily sold that truck to a nice guy that bought it for parts for his sons truck.
I used a Sabertooth 12A in my wildthumper 6wd and never came close to its limit. A 4WD rover even with 37D motors should be no problem.
@count74 @dkemxr
thanks for both of your advice. I think the next step is purchasing a decent rover. maybe even the aion robotics one.
another thing I wanted to ask. is it possible to make a mission with reverse options in it?
I wonder if obstacle avoidance would solve the problem of turning radius for tour application? I played around with a Maxbotix analog unit a couple years ago and it was useless but there are better sensors and support for them now.
Sure does. Do_Set_reverse works. Best way to experiment with mission commands is with the SITL simulator in Mission Planner.
im trying it now but cant seem to figure it out. I have 2 waypoints, I want the first to complete going forward and second to go in reverse. but when it gets to waypoint 1 it just stops dead
I have run it in SITL but not on the vehicle. It should work. At the Pub can’t test it right now.
obstacle avoidance would be good. I have an arduiono kit which comes with all those sensors. I got that first before the apm to get an understanding on wiring etc but just jumped into setting up the apm
Which sensors? The analog ultrasonic sensors are junk IMO.
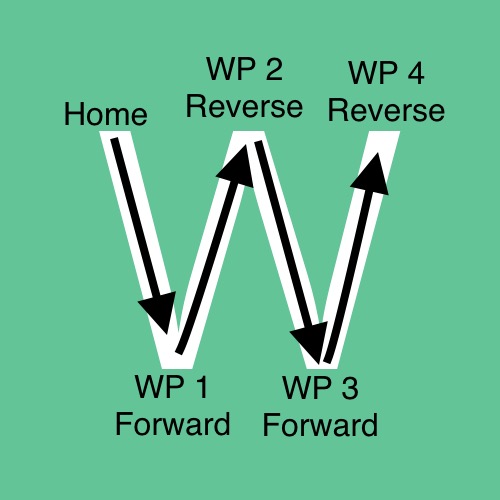
If I can figure out how to make waypoint 1 go straight & then waypoint 2 in reverse it would be a huge help. That way I can keep the rover I have & not have to worry about turn radius or sensors. I’ve drawn an example of how I’d like the mission and waypoints to work, please forgive my terrible example:
So, back and forth so it doesn’t turn around at each WP?
Yes exactly. That way I won’t need a turn radius and can cover an area thoroughly
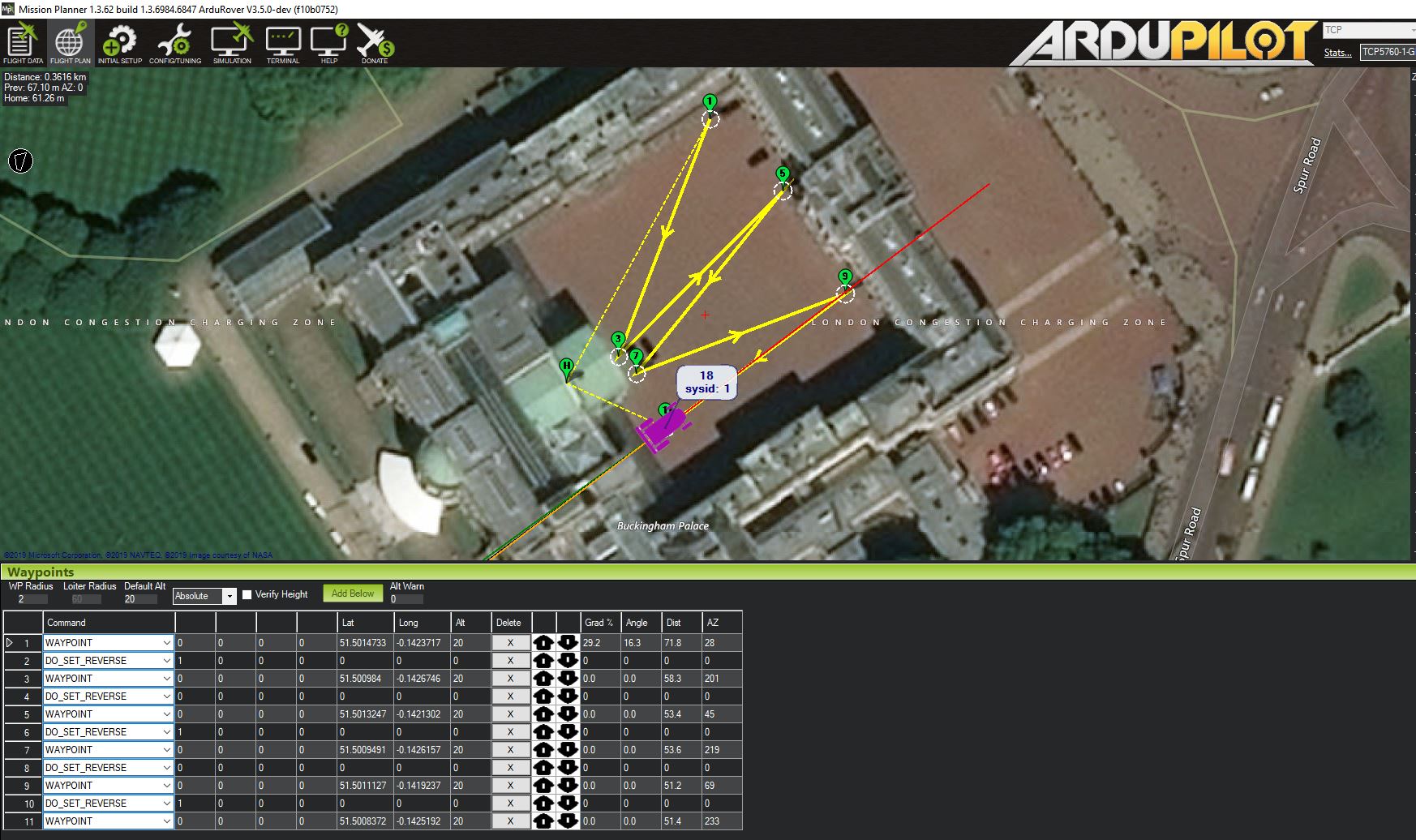
This is easily done. Pay close attention to the mission commands and settings in the attached mission across the Buckingham Palace Courtyard. From the Palace Home position it will cross the courtyard driving forward and return in reverse in each leg. It’s that simple.
I will work on that. I have this document https://www.dropbox.com/s/fhvncm3qlkhkmzz/Using%20U-Blox%20C94-M8P%20with%20Ardupilot%20on%20a%20PixHawk%20Rev%202.docx?dl=0 on what didn’t work and a teaser about the LoRa implementation. I will try to create a blog post with the details of the working method.
Thank you for positing that. I did something similar last night but I’ve noticed in the picture you’ve posted that the Lat & Long are set to Zero, also noticed that some do_set_reverse have a 1 next to them and some are left with 0. Not sure why that would be. Just need to understand the mechanics of this feature to make it do the same pattern as the one I posted last night.
So with what I’m after could it be as follows?:
1: Waypoint 0
2: Do_set_reverse 1
3: Waypoint 0
4: Do_set_reverse 0
5: Waypoint 0
6: Do_set_reverse 1
There are no Lat and Long coordinates because the DO commands are not positional. You can see for yourself what the 0 and 1 do by adding a DO command to a Mission and looking at the top row for the column descriptors for the commands variables. In this case the 1st column is for Direction (0=F, 1=R).
I don’t know what you are showing there with the Waypoint 0 repeated 3 times. But you will get more benefit if you experiment with this yourself in Mission planner SITL. Load Rover from the simulation page and plan a mission. Then go to the Flight data screen and select the Actions tab for the commands required to change modes, Arm/disarm and Start the mission. Play around with it until it runs the mission you want.
Once you get the hang of this you can modify the saved Waypoint mission you created with Learn Wapoints and add additional commands like the DO commands and then upload it to the vehicle.
Edit: I just tried this out with my Rover and it worked great. Surprisingly little weaving in reverse, probably straighter than I could drive it. I did notice reverse went a bit faster which could be addressed with DO_CHANGE_SPEED commands or play around with the throttle setting maybe.
Actually it didn’t go faster after reviewing the log. The reverse direction legs were uphill so maybe just the perception plus the gearbox was making more noise.
Struggling with the old reverse function here. Can’t seem to get the rover to go straight to 1 waypoint and then reverse to another waypoint. There’s obviously a knack to this.
This is what I’m trying to achieve but can’t understand how to program the waypoints and reverse points: