Hi.
I’m trying to use MP’s “Antena Tracker” feature to move a gimbal holding a video camera to have it pointing constantly to a copter on the air, and be able to zoom on it.
I assume that MP, knowing camera location (“Tracker Home”) and receiving copter coordinates can calculate the pan and tilt angles and the pan and tilt servo pulse widths. So I modified a Mobius camera gimbal to admit two MG90S servos and hold a video camera with appropiate tilt angles. The span for these servos is 90º moreless, and the controller to use is a USB Pololu Maestro.
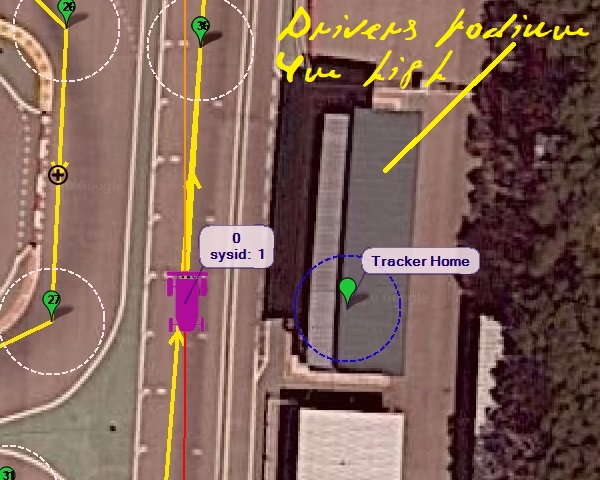
Not being able to make it work in the field, I prepared this SITL mission:
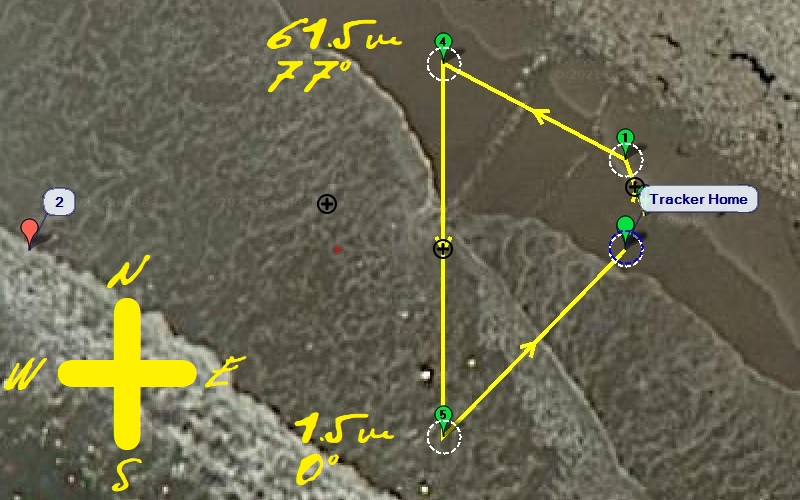
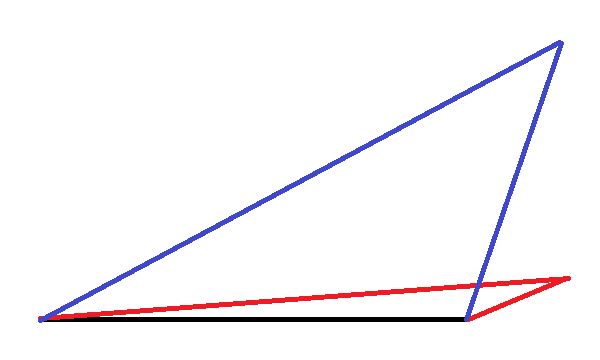
So pan total angle results 90º and the copter climbs 60 m from the south to the north point (camera angles moreless 0º and 77º).
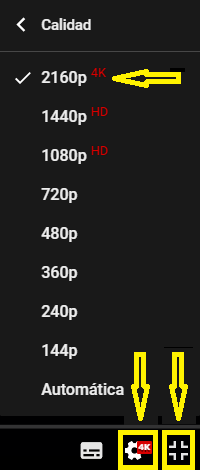
With this servos setup
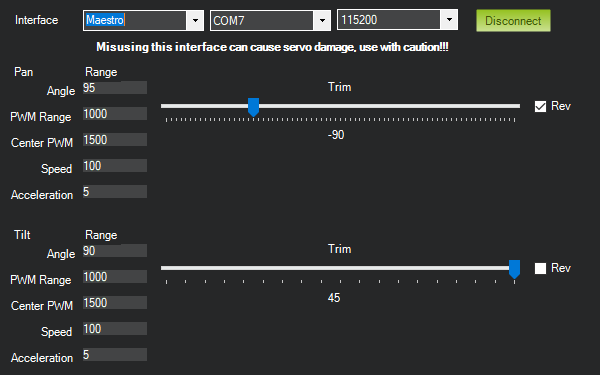
the servos traveled correctly with this mission:
QGC WPL 110 0 1 0 16 0 0 0 0 33.740131 -118.376357 8.863070 1 1 0 3 22 0 0 0 0 33.74016190 -118.37637030 1 1 2 0 3 201 0 0 0 0 33.74011190 -118.37677030 1 1 3 0 3 93 0.001 0 0 0 0 0 0 1 4 0 3 16 0 0 0 0 33.74021590 -118.37649250 61.50 1 5 0 3 16 0 0 0 0 33.74000790 -118.37649250 1.50 1 6 0 3 177 3 -1 0 0 0 0 0 1 7 0 10 21 0 0 0 0 33.74011190 -118.37637030 0 1
as can be seen in this video (which includes the Maestro pulse widths).
The mission points shown are at sea level because I could only make it work it at sea level. When defining the “Tracker Home” no height information is given, and when I translate the mission on points above sea level the tilt servo moves very little or has only extreme values (2000).
(Obviously, the real process was the inverse: not getting correct tilt servo movement I finally saw that if the mission was at sea level it moved beautifully).
The problem is with the tilt servo; pan servo works. Tried with latest MP 1.3.7803.12511.
How can I get a correct tilt servo span above sea level?
Or, what am I missing?