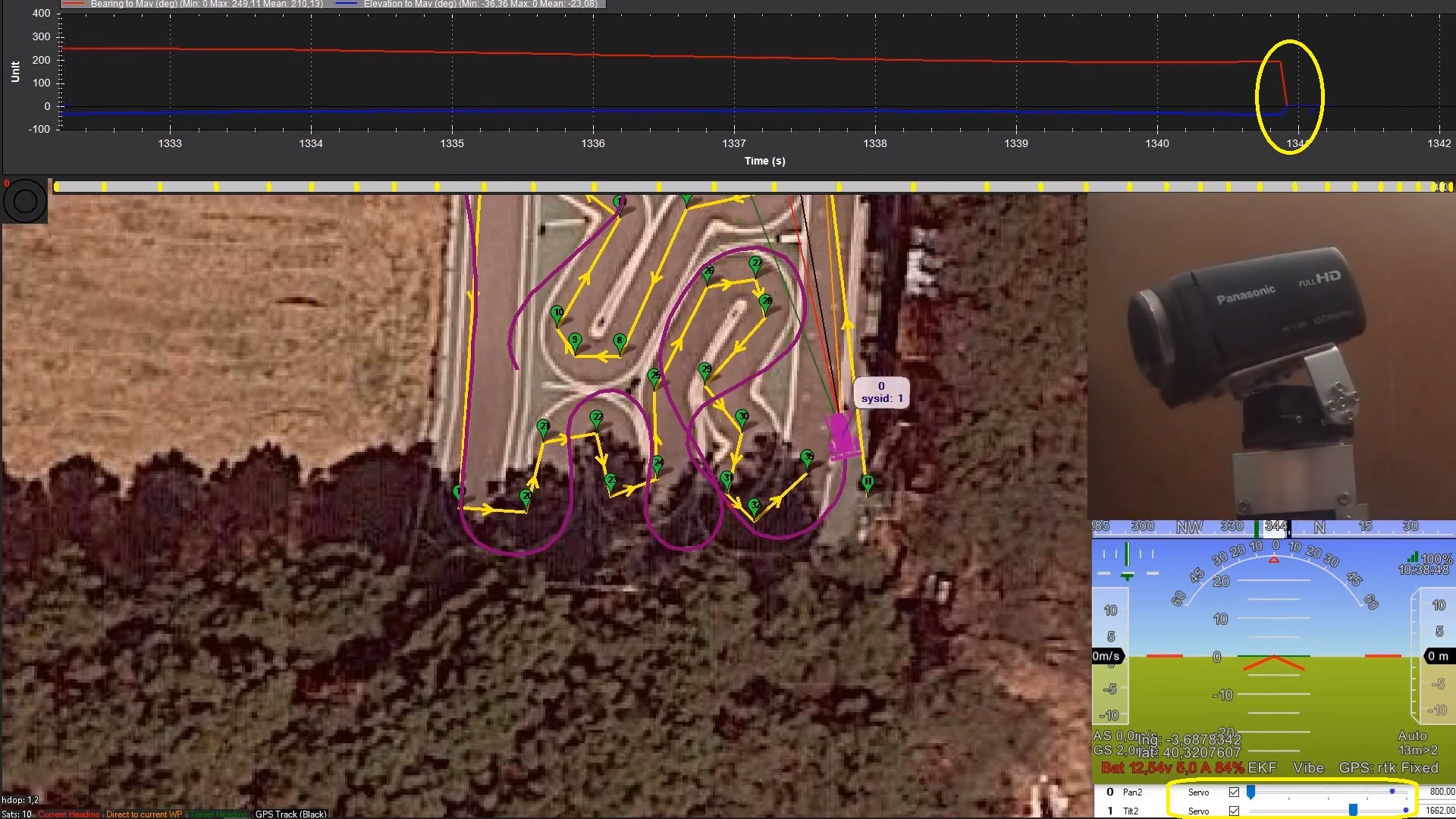
When that happens, the camera starts to be moved away, and the Pololu servo measurements show arrows and dots separated (thanks to the speed/acceleration servo limitations), that try to converge:
BTW1, on above simulations MissionPlanner.MainV2.comPort.MAV.cs.TrackerLocation.Alt is set with a script (4m above rover). I yet don’t see how to modify it on MP.
BTW2, it would be desirable to have servo outputs right after GPS lock.
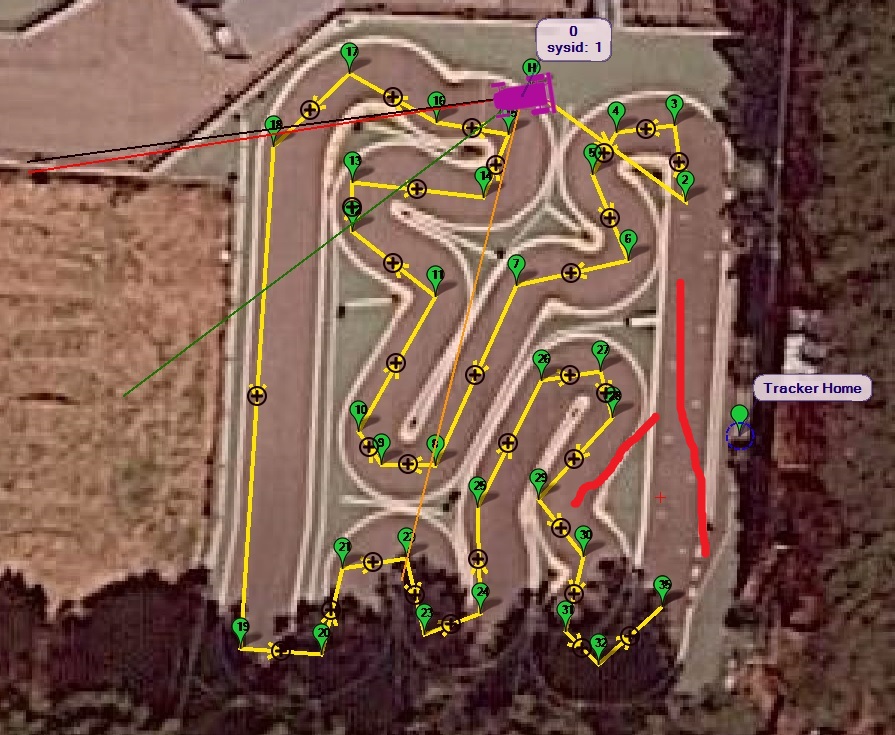
Thanks for the attention. Certainly, given the circuit dimensions, it happens 5m from tracker location (I supposed measured on the base).
So in essence:
public float ELToMAV
{
get
{
var dist = DistToHome / multiplierdist;
if (dist < 5)
return 0;
...
return angle;
...
public float AZToMAV
{
get
{
...
var dist = DistToHome / multiplierdist;
if (dist < 5)
return 0;
...
return (float)bearing;
...
But if in return 0 that is interpreted as an angle there is certainly going to be a sudden camera movement from previous angles to 0, as can be seen in above videos (entering <5 and exiting
<5). The camera by itself often shows “Panning too fast” message.
I would prefer maintain angles (dead zone concept), or better simply rely on speed/acceleration servo movement limitations (suppress return 0), which works very well as can be seen in Pololu indications (dot slowly converging to arrow).