Freezing cold and blowing a gale down here, so no flying this weekend! But plenty of time to put a video together My Mini Talon quadplane has been going well for almost a year now. It’s based on the Mozzie design and is great fun to fly.
It’s got a 3-axis gimbal mounted on a modified itsqv cockpit - which places the gimbal directly above the forward quad-boom. The gimbal is fully controllable using the pass through function on the Pixhawk.
Here’s a video that details the components used on the plane:
I occasionally get asked for the parameter file on my channel - here it is for those who are interested:
I especially liked the part where you showed the rugged take-off and landing terrain, which revealed a real need for a VTOL. Your design has a higher pitch whine than mine, much more like an angry hornet or Mozzie.
Last winter, I added the Yaapu telemetry to my setup, which I really like. It looks like you can add it to your setup with a simple cable.
Greg, what is the downside of using longer booms? just not as nimble? I have some 10mm sq ones that are 750mm long, and intend to use some 2212/950kv motors using either 9 or 10x4.5d Graupner props (basically the DJI450 propulsion system) on 4S…
A down side might be more wind resistance. There’s never been a real comparison between the setups. Mine was built with more hover power for demos and crappy weather flying so it uses larger props for a more solid hold in the wind. Others have prioritized on the smaller prop, high Kv setup like the Mozzie for flight duration and minimal hover.
The mini Talon is such a solid flyer that it seems to accept a wide range of power systems, both for hover and for forward flight.
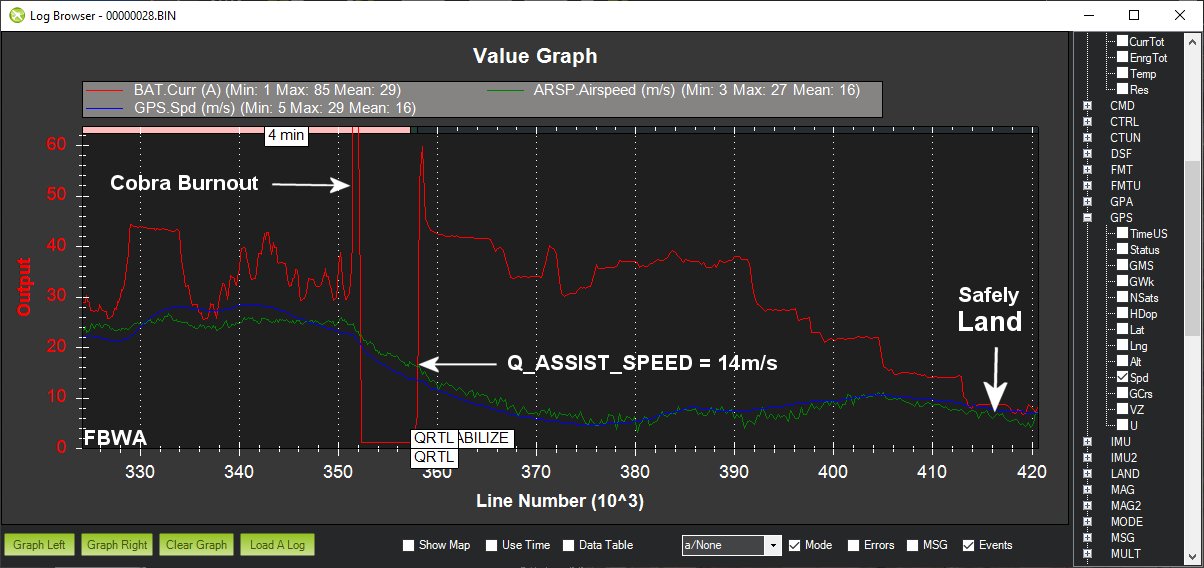
I updated the firmware on my mini Talon QP to Plane v3.9.9 and tried my first flight with my new Horus X10 and Yaapu telemetry. Take-off and transition was all working well but after a few circuits in FBWA mode I heard a “pop” and the forward motor prop stopped along with the plane’s forward motion. I was stunned momentarily and realized that the Q_ASSIST_SPEED feature had kicked in and I had lost my FF power system…but not my plane! After changing to QSTABILIZE mode, I flew it back home and landed safely. That system had been running for years of flights and I haven’t autopsied it yet but I was glad that I wasn’t too far from home when it happened. It was kind of neat to really need the Q_ASSIST_SPEED feature in an emergency.
This is my double-decker carrier for the truck. Two layers of VTOL fun!
A silly question, does the inside quad arms supports has to be glued ? or not? I read something with velcro but not understand very well (my bad english )
My autopsy revealed that the Cobra C-2814/16 1050Kv Brushless Motor had died. It is a quality motor so in its defense, it looks like some glue had dripped on the shaft during the original assembly of putting the two halves together. Fortunately, it is an easy repair/replacement as the motor is held to the mount by four hex head screws. My mini Talon QP should be back up and flying in a few days with a new glue-free motor.
Thanks Greg for your response and comment issue so We can pay more attention when We assemble, what a pitty your motor. Im very slow with my build but some progress now.
This graph shows the result of my recent Cobra motor blowout. In other words, I finally burned it out from years of flying without proper cooling. Fortunately, my mini Talon is a QuadPlane so the quad motors kicked in when the plane slowed to 14m/s. I am guilty of Cobra motor abuse and will follow the many interesting posts in this RC Groups thread on keeping it cool.
Hello everyone. Some days ago I tested my first mini talon quadplane successfully. It flied very well in loiter mode.
My quadtalon in that test was about 1,8 kg without wings and some electronic parts. I used 3s1p 2200 mah x 2 and it hovered about 9-10 minutes.
I am using sunnysky 2212 980kv motors for quad and sunnysky 2814 1250kv motor for foward movement.
Now I am preparing to test foward modes: I setup Q_assist_speed at zero, but when I arm in FBWA mode, quad motors start and increase speed (I test in place without propellers), then I increase throttle and foward motor start. I wonder if this is normal?
Thank you!
But let’s think carefully, I set Q_assist_speed at zero, and I select FbwA mode before arming. According to what you said, quad motors will start to maintain altitude and stabilizer, but how long does it maintain, because it has not limit value of speed above that the motors will stop!
If the motors spin before arming but you have activated the safety switch button then you likely have an ESC calibration issue. Be sure to calibrate all ESCs per the instructions here.
Thank you GregCovey and Cala2. Now I just understand!
Greg can you tell me what is current when you flight in foward modes after you replaces your ESC. (I see your plane AUW about 2,5kg).
I am finding more infos to decide what battery capacity I should use. My plane weight RTF without battery about 1,7 kg (400g fpv gear) (is this good weight build?).
Has some battery I can choose, it’s 6500 mah and 7600 mah 4s lipos has 510g and 600g.
I dont know with about 2,2 - 2,3 kg how plane will flight
Thanks again
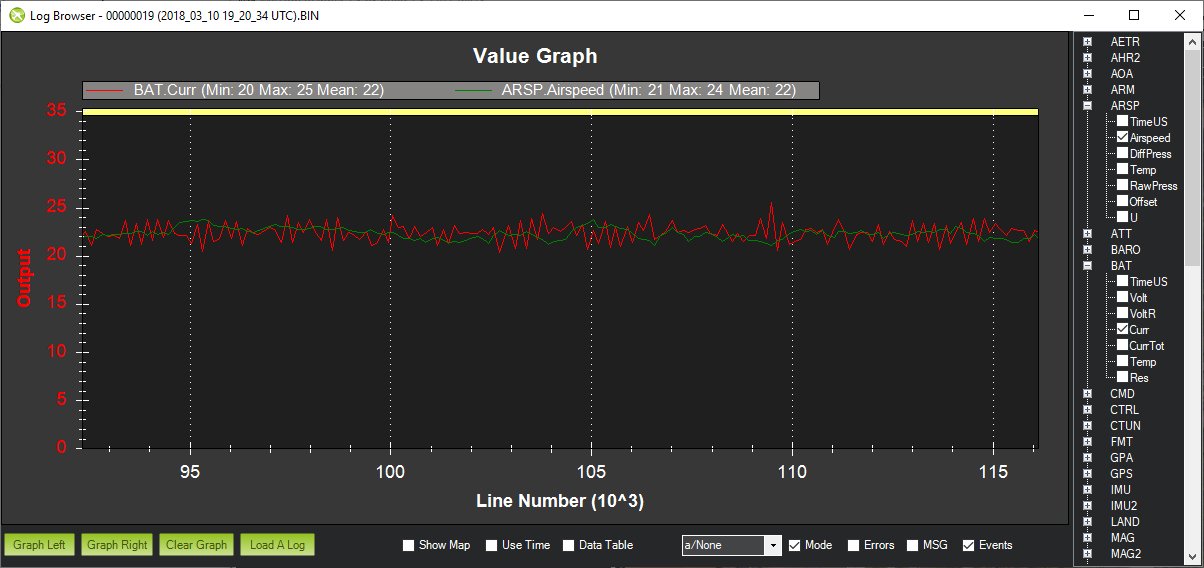
The current level depends on your flight mode, drag, and speed. In the graph below, I am drawing about 22amps to fly 22m/s. The battery weight can be decided in combination of your FPV pod weight with cameras. Try to get the actual canopy/pod weight you plan to use, even if you initially put weights on the FPV pod and then decide what battery will provide proper balance. I am using a Multistar 4s 8AH pack that weighs 22.5oz (638g) and have weight of RunCam Split, gimbal, controller, and 5.8GHz video transmitter.
 My Mini Talon quadplane has been going well for almost a year now. It’s based on the Mozzie design and is great fun to fly.
My Mini Talon quadplane has been going well for almost a year now. It’s based on the Mozzie design and is great fun to fly.


 )
)