Hi Marty,
I found an image with my Titan Li-Ion pack balanced. I hope to fly it in May when I return from Italy.
Cheers!
Hi Marty,
I found an image with my Titan Li-Ion pack balanced. I hope to fly it in May when I return from Italy.
Cheers!
Thank you Greg maybe get out later today or deff tomorrow to maiden it have a nice time in Italy and enjoy.
I guess I’m convinced that a quad VTOL is a good first choice…at least enough that I’ll build the Mini Talon as a quad VTOL for now.
On my last build of another project, I really enjoyed using an F405-Wing for a controller. Very clean and tidy. But the F405-Wing only has 9 PWM outputs and I doubt that will work. I need one for each elevon and one for each V-tail. Add one for each of 5 motors and I’m at 9 (the limit for the F405-Wing). I know I’ll need a few more outputs.
I’m unaware of any similar controllers with more PWMs. The new Matek F722-Wing has only 8 PWM outputs.
I’ve also used an mRo x2.1 and see that they have a version with the STM32F777 (x2.1-777). It’s faster and has double the RAM of the x2.1 and probably supports signal inversion in software for the UARTs. But, the big thing is that it has all 14 PWM outputs.
Any other good choices for a VTOL flight controller?
RR
Sorry for late comment on this, but I have only just started flying Qplanes and came across this thread…
for a MiniTalon Qplane you only need 8 outputs…it does not have elevons, only ailerons, so one channel for the two servos, unless you want flaperons…but with a VTOL they are hardly needed…
Has anyone else tried FS with the latest Qplanes? my Convergence is using Q_RTL_MODE=1, so that it will RTL in plane mode, then QRTL to landing when it reaches RTL_RADIUS…that works fine (of course you have to be careful to make sure the nose is pointing into the wind on the QLAND or you will get radical pitch downs…apparently Qplane do not like anything other than nose to the wind landings)
but FS in ANY copter mode no matter how close or how far, how low or how high, result in an immediate QLAND…from the docs I would have expected a transition into plane RTL and then QRTL/QLAND or at least a QRTL while still in copter mode…to me this is a BIG safety issue since there is no attempt to come back home…anyone else experiencing this…it may be a recent bug since I run the “latest” alpha firmware
EDIT…after looking into the code…this behaviour has been coded since Quadplane was introduced in 3.6…I have issued PRs to the WIKI docs to include this behaviour (which I find unsafe…FS should attempt to return the vehicle, not land it on someone/something)
Henry,
Thanks for the input. I normally connect ailerons to separate channels for spoilerons, but your point about flaperons being wasted on a VTOL make sense (and apply equally to spoilerons). So, I probably could make do with 9 channels.
However, I already moved a MRO x2.1 over from another plane. And it does help me to have the extra servo channels since quadplane DSHOT support is apparently only on channels 8 and above.
RR
Im in winter, cold and storms arrived so time to build 
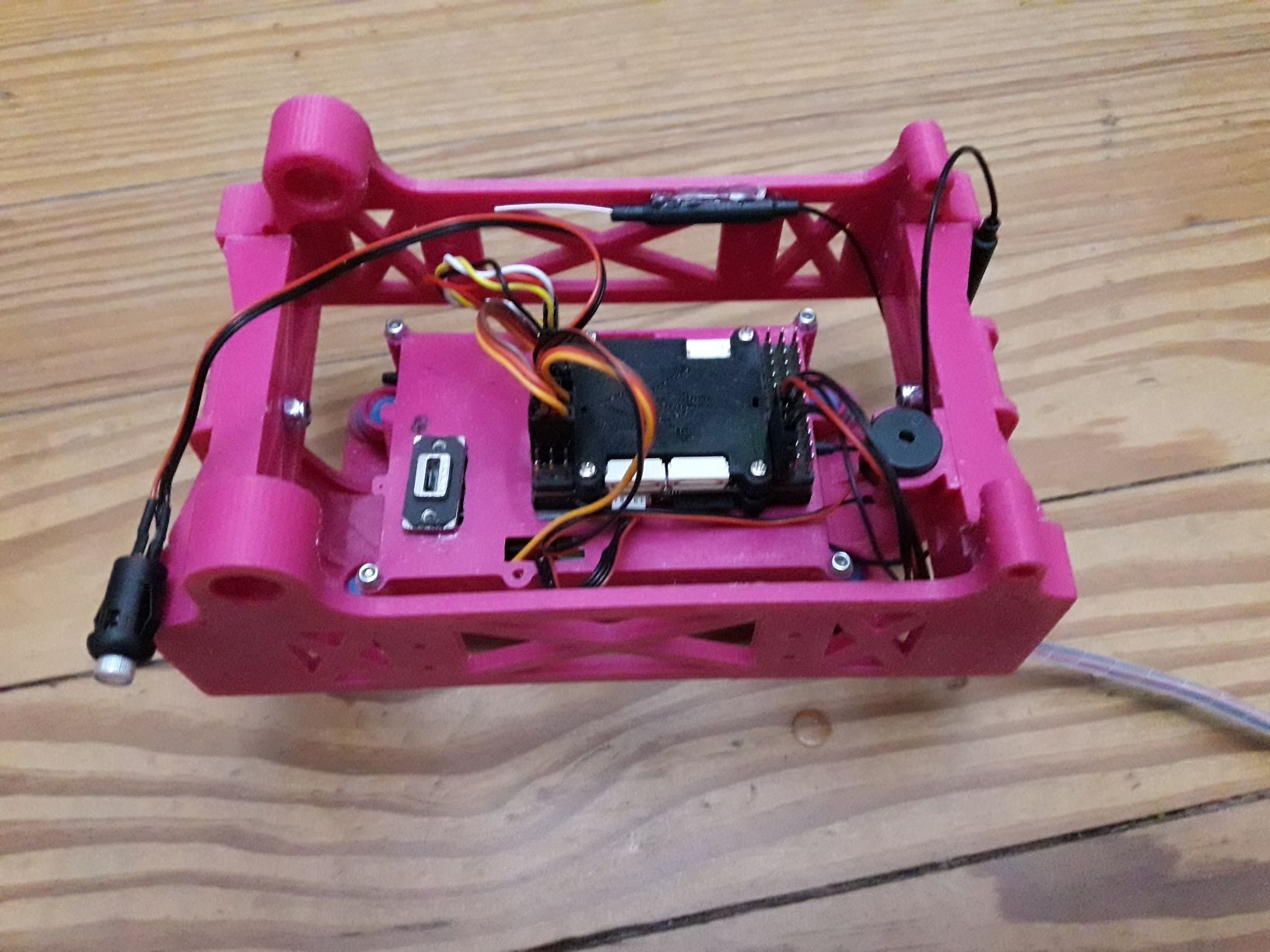
some advances here
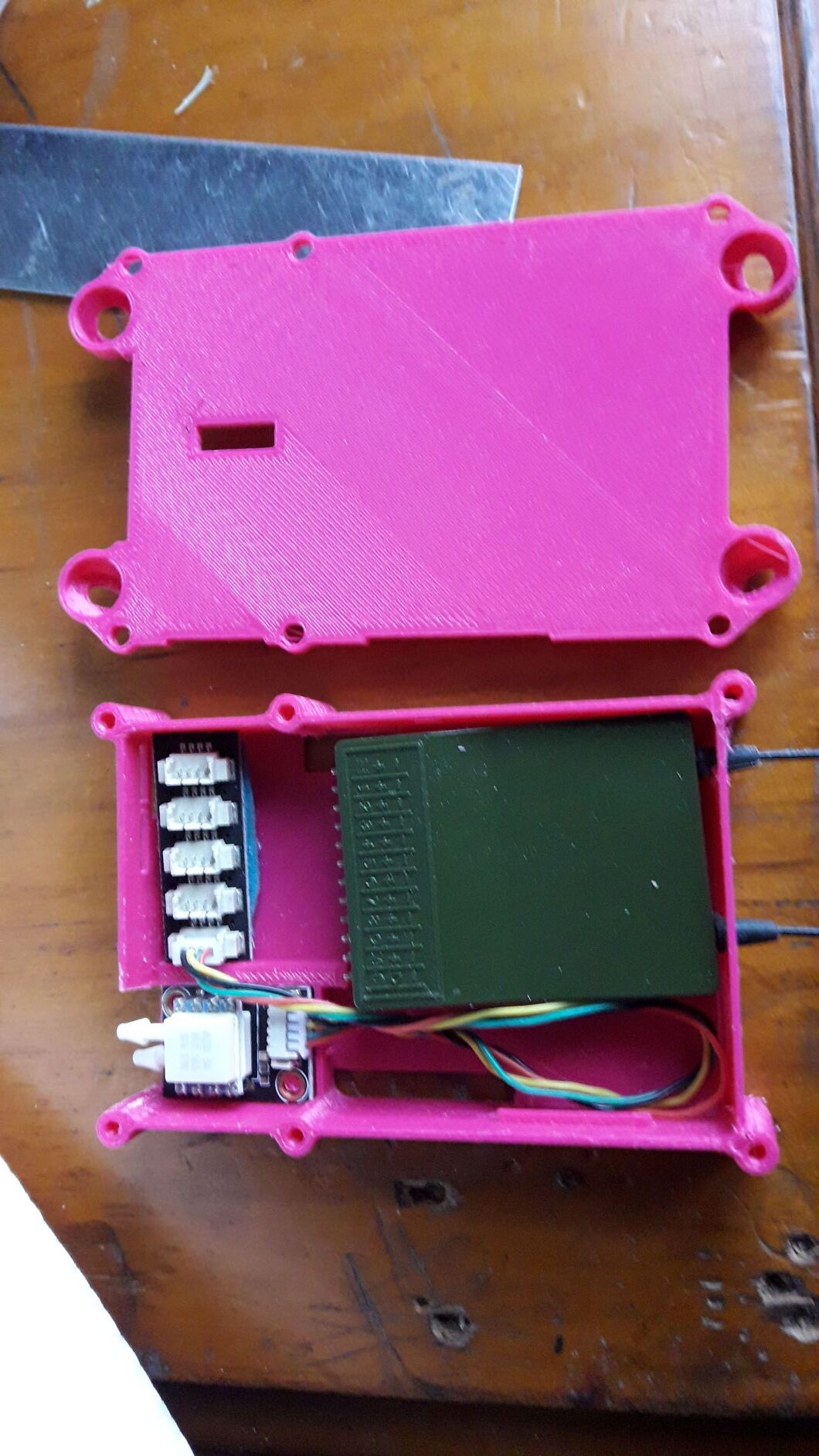
Installing the electronics
Hi cala,
I recognize the green R12L receiver but I have never used a Pixhawk 2.1. The 3D printed components allow for efficient placement. It’s hard to believe that you are in winter when we just started summer!
Good luck on your build!
Its the first X2.1 that I used, Im going to comment experience, the M12L I give a try in my conventional skywalker airplane first and go well so I hope here Is going to work too.
I still have my R12L in my Tarot 680 Pro to test. I just recently started flying again (thank God) so it is on my to-do list.
Looking forward to your progress…
Cheers!
I 3d printed the motor mount from ISQV page http://www.itsqv.com/QVM/index.php?title=Parts_Catalog_-_Mini_Talon and glue the nuts, then glue middle mount.
Hi Cala, your built is excellent. May I know where to get 3D printed file of the Wing Joint?? I can not find this specific part on the ISQV page that you provided. Thank you
Subscribed! I’ll be doing one of those builds too soon when time stretches…
The ISQV is for motor mount, but have other interesting pieces for minitalon too, the wings are here https://www.thingiverse.com/thing:3184600
I discover that minitalon have a detachable wings system before I print them but not shure if its safe one bolt pressing the cf bar, what others did? You glue the wings or use in stock detachable bolt? Thanks
I got some flying time in on my mini Talon QuadPlane and it still works great!. I made some PID changes to my Tarot roll-only axis controller and they seem to work fine, at least in calm conditions. Over the winter, I also made another pod using “itsqv” parts for a mini Mobius and SToRM32 controller. I’ll check that out next. Fun stuff!
Nice, the quad props doesnt disturb the pitot there?
The wings are detachable or you glue them?
Enjoy flying, here the coolest winter day today waiting snow  Lol.
Lol.
Hi cala,
The props do not disturb the AS sensor. Most of the time, they are not spinning like in forward flight modes. The wings are detachable just like in a stock build and held by a set screw.
It’s hard to believe that we have a hot and humid 90F day and you are expecting snow! When your project is complete, you will only need to shovel a small space for take-off and landing. 
Cheers!
Nice, thanks, I discover that bolt before printing detachable parts, perhaps I dont use to reduce weight if the bolt is enought safe.
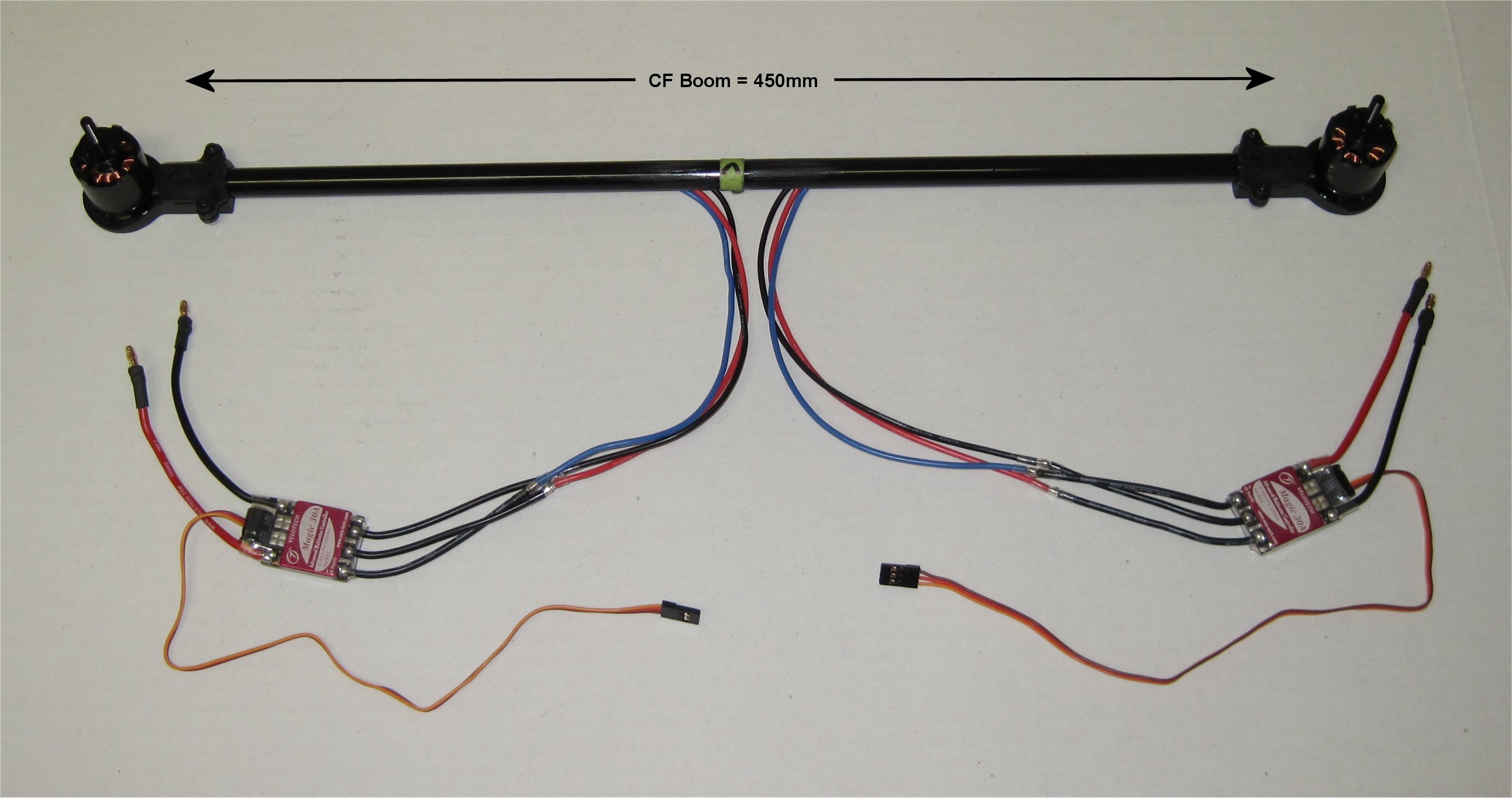
Sorry another question: how long are your quad arms?
Oops, I saw that photo and ask again, sorry