Here are my parameters:
z3.param (16.1 KB)
Here are my parameters:
z3.param (16.1 KB)
With an objective to build a 3" prop fully functional Ardupilot copter, is there a supported F4 or F7 autopilot board that integrates a magnetometer ? I do not seem to find one. The most common one (Omnibus, Kakute, etc) have accels/gyros/baros but no mag.
I will lof course use an external GPS+mag module but I like to have mag redundancy.
Thx for anyone who can advise a fully equipped IMU+mag F4 or F7 board!
It is pointless to have a on board mag for such a small build, there will just be too much interference.
I agree with Peter.
Kelly
funny thing i just finished soldering such a thing today. 
built a fully same conplete copy as my 6" rooster on the 3" Owl frame. only thing i did not put on it was a DVR - i placed a foxeer cam with video transmitter only, but it may get a runcam split mini in the future - there is space for that.
rest of it i did same - a tfmini lidar, esp8266 board, r-xsr. core of the model is this 30.5mm stack:
https://shop.holybro.com/kakute-f7-amp-atlatl-hv-v2-amp-tekko32-4in1-esc-blheli-32-combo_p1108.html
i love it. it flies with a 1500mah 4S lipo. buzzes like a bumblebee.
just did a maiden, wanna see in the log level of mag interference. hope it is not too high.
only integrated one will be a pixracer board - but it will not fit into a 3" model. and, it is overpriced and fragile.
i used kakute f7 and external mag in the small mateksys m8q module - see pics below.
cool! auto analysis does not curse at the compass! also, 13 sats and no gps glitches - thanks to not having damn runcam split on board.
Log File C:\Users\paul\AppData\Local\Temp\tmpEA5F.tmp.log
Size (kb) 2562.599609375
…
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (11.64%)
Max mag field length (577.65) > recommended (550.00)
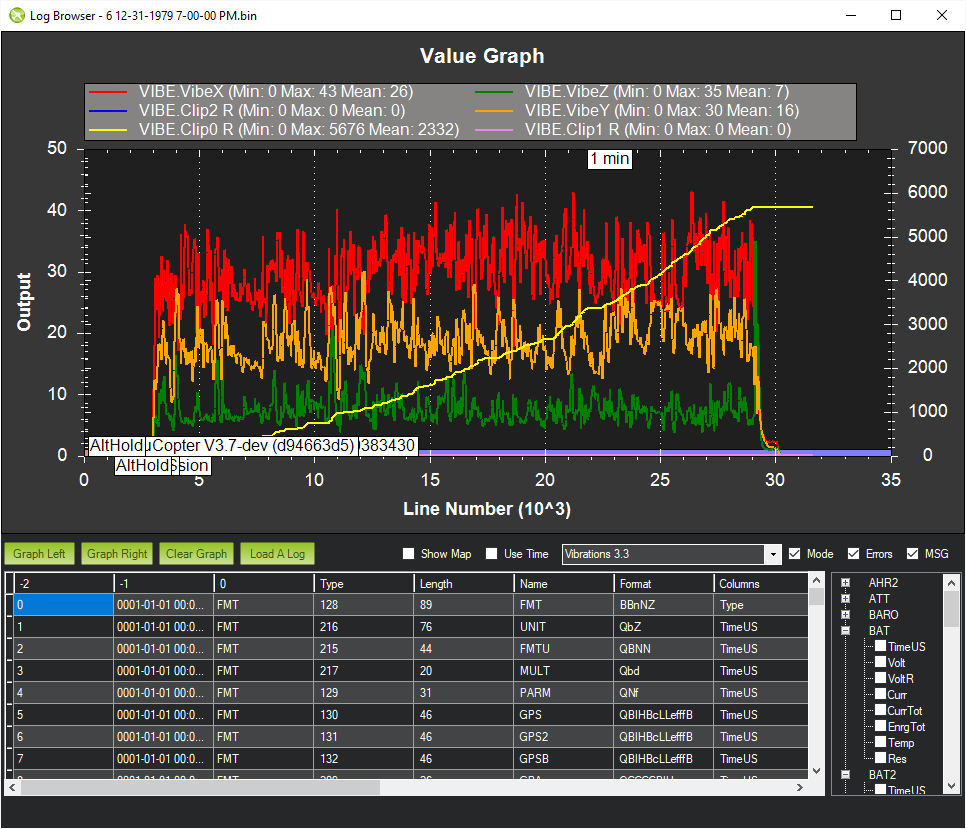
but looknig now - vibrations are crazy high. need to figure out why. it flew clean, no issues, alt hold and pos hold - no jumps - but, in the log vibrations are bad, - on X it shows max 42 mean 26, slightly less at Y and Z - around 20 mean.
which is odd as FC is on rubber mounts. what i suspect is a propwash, may be i need to make ducts to protect FC. will see.
https://drive.google.com/file/d/146-EhhXGuFtWziSqB5iVfxwedPO-cVlTXQ/view?usp=sharing
https://drive.google.com/file/d/1_yBp0RugVlv35HXF2j3IBn8h4v3y-HBwvw/view?usp=sharing
https://drive.google.com/file/d/1_Px_YPZqkvoJsGu90a70nJNQnexydWPZsw/view?usp=sharing
https://drive.google.com/file/d/155CSrAMUXNAEtZ_U7baWee4gwVT0dQa-Lw/view?usp=sharing
https://drive.google.com/file/d/1Xubz0_1qYrTsIbUXK5L4oY0qTyFVeNowBw/view?usp=sharing
i made it for my 8yr old daughter - it should be safe to fly outside and inhouse with a lidar. will see.
it is probably the heaviest owl ever built - 248g. a lot of devices on it… may be too much, but, it is a true real autonomous model.
Looks super nice ! Thanks for sharing your setup details. I have some questions in preparation of my own build:
-what are your motors ? would you advise to use this brand versus T-Motor (supposedly the best efficiency) ?
-Did you flash the F7 controller with Chibios+Arducopter ? or did you replace the F7 board by a pixracer ?
-Is the 248g weight all-in with your 4S 1500mah battery included ?
And a suggestion maybe: you zip tied your receiver antenna just beneath the Vtx antenna. Try to separate them (use another branch of the Owl frame) to reduce as much as possible the proximity between them.
hi, yes, kakute F7 is flashed with chibios and arducopter. can also be flashed with betaflight.
motors are new brotherhobby 1407 3600kv. are they better than t-motors - not sure, but i like them better.
3600kv is used in the anticipation of 4s lipo. most people would fly 3" quad on 3s and that can use smaller faster motors to save weight. but, as i have a pile of 4s 1500mah lipos so i did not want to buy a new set.
weight is without battery, so with a lipo it is almost 450g. there are ways to reduce that but i am not very concerned as i wanted to build owl frame for my kid, to play with safely. i could have used lighter camera, lighter video transmitter, antenna. lidar also adds weight but it is needed for indoor alt hold stability.
Looks good. 248g! That’s a beast. Mine is only 95g w/out the battery…
How long does the battery last?
I wish I could fly yours, to see the difference between small motors 95 gram, and big powerful motors, but 250g… 2s 950mah bat vs your 4s 1500’s…
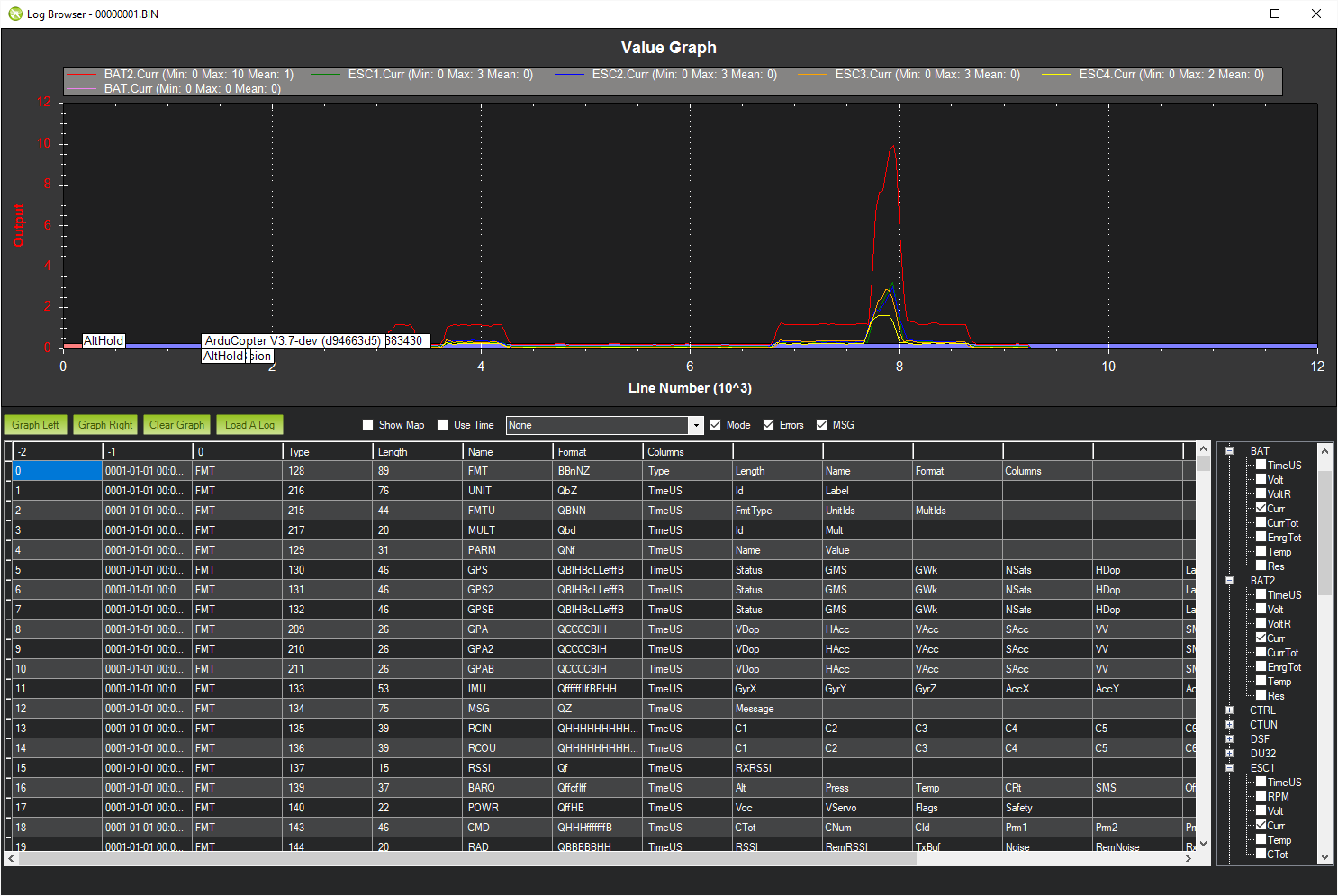
did you use 4in1 esc to provide current data? i cannot solve it for some reason. odd.
BAT section has all 0 while ESC sections have correct data.
i like how it handles. it feels it is a bit heavy with this lipo at 450g total weight but it flies and motors get only tad warm. it feels it has a bit of kick in it if needed. i did not tune it yet but it went up fine on the tune from 6" rooster, amazingly. no oscillations, no issues.
https://drive.google.com/file/d/1PL74zbBfIY7xSDi3kcWoW8cN47ICzJzA/view?usp=sharing
what should be changed?
Im not using esc telemetry. I am not set up for development, so can’t compile one w/ uart4 enabled for the omnibus nano… Hopefully someone updates master!! Hint hint, to RainFly who just got theirs working :).
I’ve been having too much fun building and flying to sit in front of my computer and loading ubuntu, etc… (I work on computers all day long, so try to avoid them as much as possible in my free time)
i got a weird combination that sort of worked -
in the first screen i had ‘other’ selected and for second - ‘blheli’, as shown. voltage was taken, current also did show but i think with not correct values - will check.
yes it works. but, it looks like all data goes into the BAT2 section of log and not into BAT. i suspect it will have issues, not sure now how to test low battery failsafe with this.
i got to say i am very surprised with the level of vibrations i observe. not sure how it is possible.
it is from simple loiter - EKF did not complain, as i was looking at it in MP real time - but it is so odd to see X vibes getting so high while Z are where it would have been always.
i wonder if it is something 3" model specific at high KV but it is odd
I created a pulll request to get UART4 in hwdef.dat.
At least I think so. I’m not a developer.
OK, thanks a lot!!
I’ll get around to getting myself set up for development soon, as the days get colder… So, no big deal if you don’t get it in.
are your props balanced?
And, is anything loose? Be sure everything is screwed/taped/strapped very tightly.
all is done as usual, i suspect it is a prop wash, going down a duct tape path now… just like in the ‘red and green’ show, if you remember what it was…
How do you communicate the mavlink telemetry from the Kakute F7 to mission planner ? via an ESP8266 Wifi board or via radio ? Or do you not transfer telemetry during flight and you just use a USB cable on the ground ?