I’ve had problems w/ that GPS in the past… It’s not a great one.
My first guess is simply that this copter is more compact and/or has other interference causing components. Runcam split or something. I have a Matek gps that works fine on its own, out in the open, but takes about 20 minutes to receive any satellites on my microcopter… If I ever receive any…
A mRo GPS w/ the exact same antenna receives 10 satellites in just a few minutes on the same copter.
Foil tape does help w/ the interference. Now I basically put copper tape across the entire top of the copter, and have the GPS on top of it. For some reason, using it as a shield, ungrounded, seems to work better than grounding it. (at least for me).
My other thought is maybe you have the GPS configuration different between the copter it works on and this one. And when connected to ucenter, it’s definitely using its on-board, saved config. SO, compare your params, or even disconnect the wire that’s connected to TX on the FC, and RX on the GPS.
-edit, and now that I think about it, the omnibus nano seems to create some interference on its own, too. I get more sats, or faster reception, on my kakute copters. (everything else being exactly the same). Besides covering the top of my copter w/ foil, I also have been sticking a tiny square of it on top of every IC on every board in my copters.
On this copter I have a Firefly 4K Split Mini Cam and Eachine TX526 Video TX.
First I tried to disconnect the VTX with same results: no Sats.
Then I disconnected also the Cam and now I see 3D fix from GPS.
Maybe I can try to shield the board of the Cam and the bottom of the GPS.
See if you retain the satellites after you power the camera again. That’s how my matek works… I just need to shut everything down while I get the satellites, but it keeps working if I turn it back on and fly.
And yes, try shielding. It really does help. I was surprised ungrounded pieces of metal did anything… Ended up googling about it for a while, and yes… It’s apparently pretty common for noise suppression in various electronics.
Like Andy said, shield the cable coming from the camera to the PCB, too.
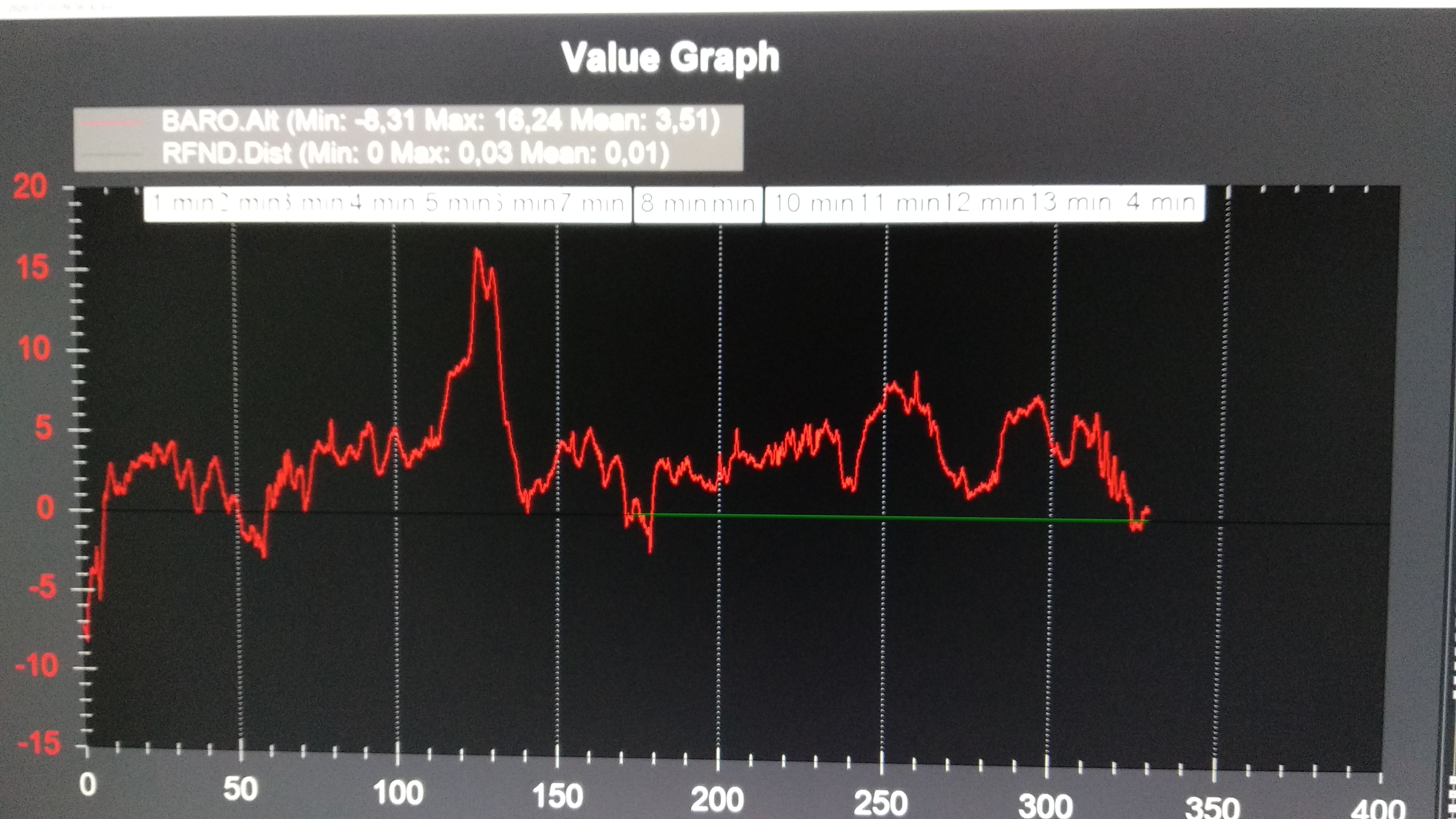
on my 3 "quad with optical flow I connected the lidar VL53L1X and the test seems to provide a correct reading but in flight it seems not to work well and the behavior of the quad is better with only the optical flow. I followed the wiki instructions. I get bad lidar health only with the quad resting on the ground and the sonar range value at 0. if I manually raise the quad the height seems correct.in the log I get only 0.3 actually the quad has reached 15 meters … I don’t understand.
I fear there is some problem with u-blox GPS on V4.1.0-dev, at least with the cheap BN-880.
With V4.0.4-rc2 on my 3 inch copter with OmnibusNanoV6 I have a good stable Loiter with BN-880.
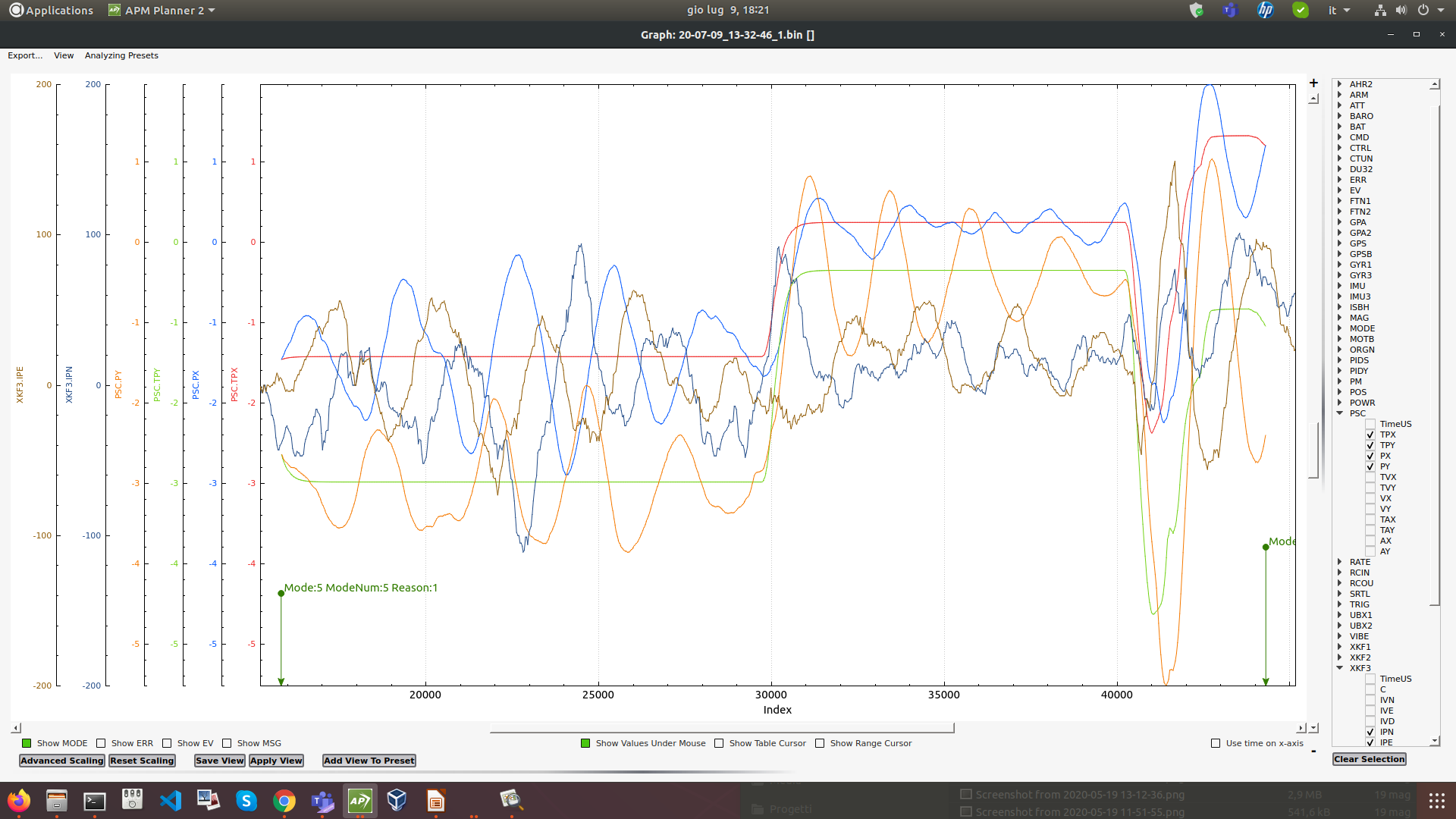
With V4.1.0-dev and same HW, same parameter in Loiter the copter moves in circle similar to toilet bowling but is not a Compass problem.
I attach two plots from logs of the two situations.
Maybe this problem could be related to the switch to 230400 baud for u-blox GPS with this PR. On V4.0.4-rc2 the same GPS is configured to 115200.
I will try 4.1.0-dev without this PR an I will see.
Anyway I would like to know if someone is using latest master on OmnibusNanoV6 and u-blox based GPS (at 230400 baud) and if it’s all OK or there are some problems.
yes, with the GPS’s I mentioned above. No problems.
Isn’t there a parameter for the baud? Have you tried lowering it? I wouldn’t be surprised if the bn880 isn’t quite to spec.
And otherwise, post in the main 4.0 section… Sounds like this could be more of a general issue w/ that GPS, and maybe others have seen it.
Yesterday I rebuilt V4.1.0-dev from master and did another test with same HW settings and params configuration described above and I have no problems of position control with GPS in Loiter even if the BN-880 was set to 230400 baud.
I don’t know what happened in the test posted above with bad GPS position control. Whatever it was seems to have disappeared.
I will do other test and if I will see problems I will post it in the main 4.0 section of the forum.
Moving on to another topic, I would like to know, from those who use OmnibusNanoV6, if you have problems with logs in flash memory.
I always see logs with problems, missing messages, missing flight parts.
Is it the same for you too?