That flight looks great, congratulations …
1 Like
absolutely excellent flight there was very corageous well done
I flew with this today: https://github.com/ArduPilot/ardupilot/pull/14441
Gyros set to 4Khz on an F7, seemed to work fine.
2Khz on an F4 causing me some issues that I haven’t figured out yet.
This reason for doing this is my miniquad has 3-blade props going up to 600Hz so there is going to be noise at 1800Hz that a 2Khz sample rate will struggle with .
1 Like
The INS_GYRO_RATE parameter will be equivalent to SCHED_LOOP_RATE ?,
1 Like
No. It’s the backend rate at which gyro samples are available. By default on most IMUs this is currently 1Khz. It’s independent of the SCHED_LOOP_RATE. It’s the rate at which the gyro filters are run, so fast means less group delay as well as better filtering at higher frequencies.
1 Like
Excellent, thank you very much Andyp1per.
1 Like
I want to post the couple improvements I’ve made on my copters. I guess it’s only a couple of things, but took me months to get right, and has made a big improvement.
First is vibration damping. On the Kakute Mini w/ ICM20689, I had to take extraordinary measures for vibrations. (In the end, I don’t know if it mattered. It gets phantom vibrations while just sitting stationary on the bench so might be an issue w/ the IMU). With the way I have it in this photo, my vibes average around two, and usually don’t peak much above five. It’s two layers of rubber stand-off’s. Then pieces of earplug foam stuffed between the layers, to reduce bounce and reduce the delay the rubber alone adds. I also added stiffer zip ties to my antennas so they flop around less in flight.
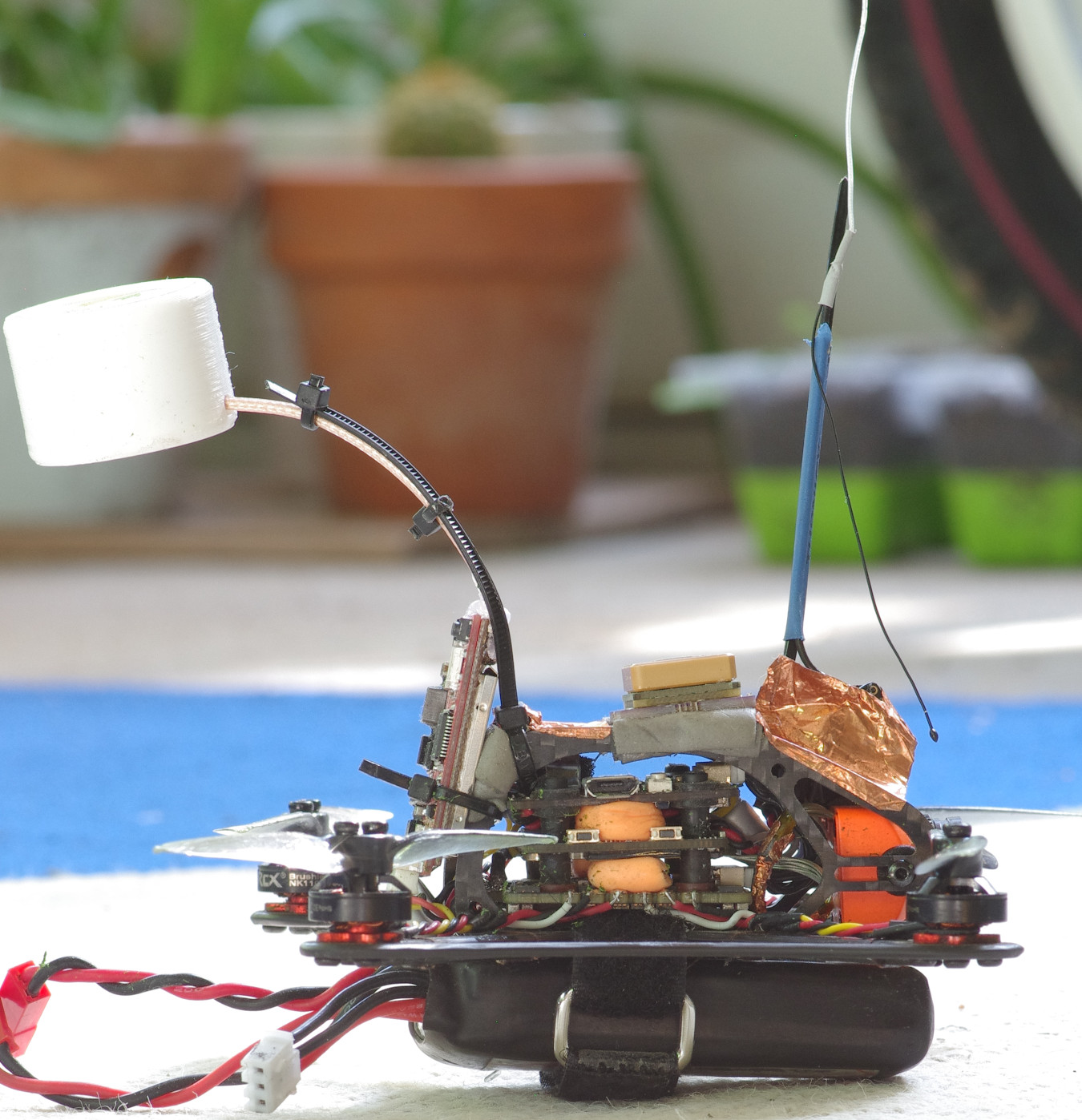
I have omnibus nano’s hard mounted with much higher vibes, too, w/out any problems. So this isn’t always necessary.
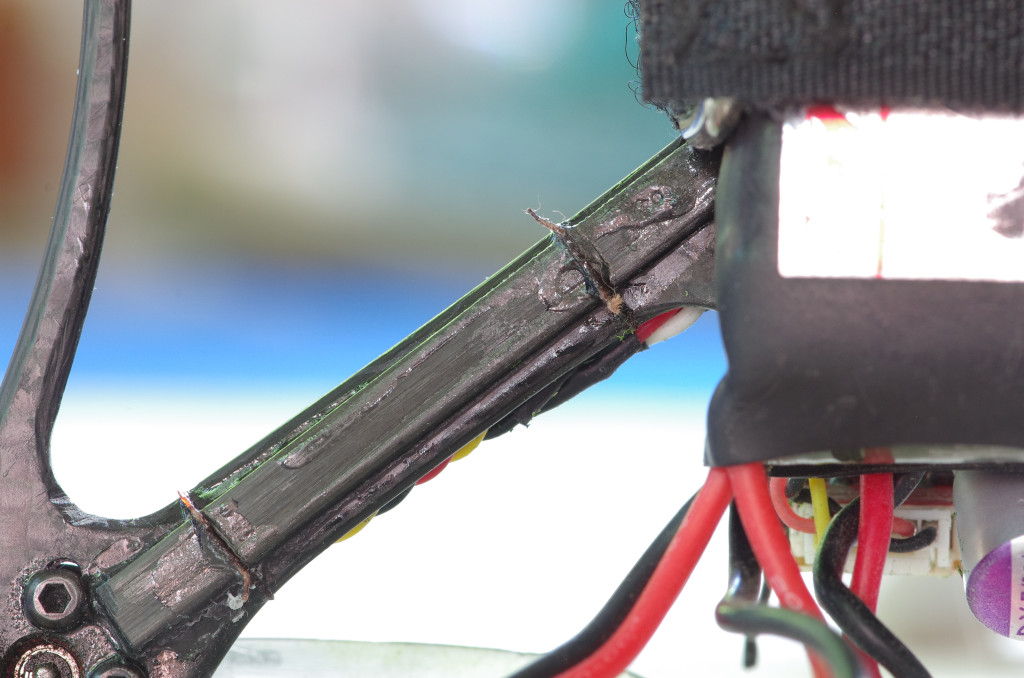
Then I also glued carbon fiber rods to the arms, which helped a lot. I had big frame resonance peaks on my FFT’s, and once I added the extra support, those peaks are gone. This made a big improvement on both my omnibus and kakute copters.
Currently they’re just held in place w/ some ‘flexible’ cyanoacrylate and then string tied around them with more glue applied to that. They broke free once in a crash, and so I’ve added the strings. If they pop off again, I’m going to use some special 3m epoxy that’s supposed to be good for carbon fiber.
I’ve also been pushing my filters and PID’s very high. Currently my gyro filter is at 140. D term filters at 110. Using the ESC based harmonic notch. PID’s are Roll P=.120 D=.0028 Pitch P=.150 D=.0035. So far, the higher I go w/ the filters, the better the performance. I’m slowly looking for the point where things start to heat up, but haven’t found it yet.
(This is with 2s and weak motors. do not try values this high if you’re not on 2s. And I’ve only been trying values over 100 for about a week, so not a lot of testing yet)
And what’s really interesting, is AutoTune is giving me about the same PID’s! I wasn’t trying anything so high until the last time I ran autotune, and for the first time ever it gave me values higher than I was trying myself.
When I started this thread a few years ago one of my complaints was that auto tune gave me very low PID’s and the copter was difficult to control, felt drunk. Now, it’s putting them higher than I was even trying.
Still some issues. Lot of problems w/ the kakute’s that aren’t worth mentioning (and i have plenty of threads about).
One issue that exists on all of my copters, is random twitches… I’ll be flying perfectly smooth, then it just twitches a few degrees a few times… Then smooth. Sometimes it randomly breaks into a mild oscillation mid-throttle… again, flying along smooth for a couple minuets, then it starts slowly oscillating until I change the throttle %. I’ve tried low PID’s and high PID’s, and the same things still happen occasionally.
So, still a work in progress, but so much better than a couple years ago.
–Edit to say, also low ESR caps. I wasn’t sure they were really helping, but had one break loose, and I flew w/out the cap, and it was bad… Lots of twitches. And when I landed my controls reversed, then the hud started spinning, then I got a crash/disarm, just sitting stationary on the ground.
I use these, which are awesome if you’re on 2s. .008ohm esr, and high ripple current.
https://www.mouser.com/ProductDetail/647-RNL1C122MDS1KX
But, only available in voltages of 20 and below.
There are other options for higher voltages… these are the best I’ve found if you’re on 2s, though.
–edit 2, And Shielding…
I put a small square of copper tape on every chip on every board. Then still usually need to cover more of the exposed camera cable or camera itself with more foil tape. It makes a noticeable difference in GPS reception.
1 Like
Very nice!
A couple of things I’ve discovered about tuning over the weekend:
I concur that high gyro filters on these smaller quads makes things better. I am at 120Hz on my 3", 4S. No heat that I can see.
Running autotune with AGGR 0.2 gives a much better tune
Running autotune with FLTT set high on P&R (>=100Hz or off even, but not tried that) gives a much better tune. You can set it low again afterwards but don’t run autotune with it low. I suspect this is what you are seeing when you say autotune has got better.
2 Likes
Thank you both for this input,your hero’s in my book kep the great work up,im having props with a matek F405ctr board but will give this a try
with matek F405CTR all works fine (5" quad) but the barometer’s reading is wrong (4/7 meters error)
I recently built another 3 inch copter with omnibus nano v6. With prebuild (latest) firmware I don’t have dynamic FFT. I had to add
define HAL_WITH_DSP 1
to hwdef.dat and rebuild the firmware by myself. In this way it works and it works really good.
@andyp1per Is there any reason why this is not in master?
With today master, after reboot (sometimes), I see messages relative to watchdog that resolves after next reboot, then the copter works with no problems. FC omnibus nano v6 as per previous post.
[MAV 001:1] SUCCESS: Executed CMD: 246
[MAV 001:1] Found corrupt log 7 at 0x5471, erasing
[MAV 001:1] Calibrating barometer
[MAV 001:1] Initialising ArduPilot
[MAV 001:1] Barometer 1 calibration complete
[MAV 001:1] INS: alloc 6144 bytes for ISB (free=64144)
[MAV 001:1] EKF3 IMU0 buffs IMU=6 OBS=2 OF=5 EN:5, dt=0.0120
[MAV 001:1] EKF3 IMU0 initialised
[MAV 001:1] EKF3 IMU0 tilt alignment complete
[MAV 001:1] RCInput: decoding IBUS
[MAV 001:1] Found 7 complete logs at 0x0001-0x5470
[MAV 001:1] Baro: skipping calibration after WDG reset
[MAV 001:1] INS: alloc 6144 bytes for ISB (free=64144)
[MAV 001:1] Restored watchdog attitude -1 0 -0
[MAV 001:1] EKF3 IMU0 buffs IMU=6 OBS=2 OF=5 EN:5, dt=0.0120
[MAV 001:1] EKF3 IMU0 initialised
[MAV 001:1] EKF3 IMU0 tilt alignment complete
[MAV 001:1] WDG: T6 SL419 FL0 FT0 FA0 FTP0 FLR0 FICSR0 MM0 MC0
[MAV 001:1] IE32768 IEC13 TN:
[MAV 001:1] PreArm: Internal errors 0x800 l:225 ,watchdog_rst
[MAV 001:1] WDG: T6 SL419 FL0 FT0 FA0 FTP0 FLR0 FICSR0 MM0 MC0
[MAV 001:1] IE32768 IEC13 TN:
[MAV 001:1] WDG: T6 SL419 FL0 FT0 FA0 FTP0 FLR0 FICSR0 MM0 MC0
[MAV 001:1] IE32768 IEC13 TN:
[MAV 001:1] WDG: T6 SL419 FL0 FT0 FA0 FTP0 FLR0 FICSR0 MM0 MC0
[MAV 001:1] IE32768 IEC13 TN:
[MAV 001:1] PreArm: Internal errors 0x800 l:225 ,watchdog_rst
[MAV 001:1] WDG: T6 SL419 FL0 FT0 FA0 FTP0 FLR0 FICSR0 MM0 MC0
[MAV 001:1] IE32768 IEC13 TN:
[MAV 001:1] SUCCESS: Executed CMD: 246
1 Like
It’s only on by default on 1Mb boards. I would prefer it was on everywhere - but it consumes a lot of flash.
just out of curiosity would the new mRo Zero Senen board work any better with a 3" quad with its super dooper specs just to expensive
I don’t know how that could be mounted on a 3" copter, while still being able to mount ESC and camera, etc… 3" pretty much needs a stack.
I can’t believe they’d design a small board like that and not conform to the 20x20 mount pattern standard!! Makes no sense to me.
I guess it would be great for a 5" prop, 250mm size copter.
1 Like
Please create an issue on the ardupilot repository with whatever
applicable logs you have.
A dataflash log would be particularly useful.
Peter
1 Like
Here the relative issue: https://github.com/ArduPilot/ardupilot/issues/14606
Andrea
1 Like
But on 4.1, if I understood right, there will be no more EKF2, only EKF3, so there should be space for FFT. I build it from master with FFT and it fit on F405 1MB boards (tested on omnibus nano v6 and revo-mini).
1 Like
Yes I agree. Somehow we have to persuade @tridge that this is a good idea!
1 Like
Sorry for stupid problem.
I attached a BN-880 (GPS + Compass) to my 3 inch copter with Omnibus Nano V6 and it sees 0 Sats.
The GPS is connect to TX6, RX6 and Compass to TX3, RX3 (I2C).
I am using (for this test) ArduCopter V4.0.3
The Compass works, The GPS give this message on boot:
[MAV 001:1] GPS 1: detected as u-blox at 115200 baud
[MAV 001:1] GPS: u-blox 1 saving config
[MAV 001:1] u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
So I think the cabling is OK, but as I said it see always 0 Sats.
The same GPS module works on another copter with Pixracer and on u-center with USB to serial adapter (13 Sats same place for all test).
What could be wrong?
I attach the file with params:
parameter-omnibusv6-x135-28-06-2020-EK2-GPS.param (24.3 KB)