Well done @andyp1per finally I see logs on my omnibus as they should be!
All tings in place and no errors when reading. All OK also from command line tools mav*.py
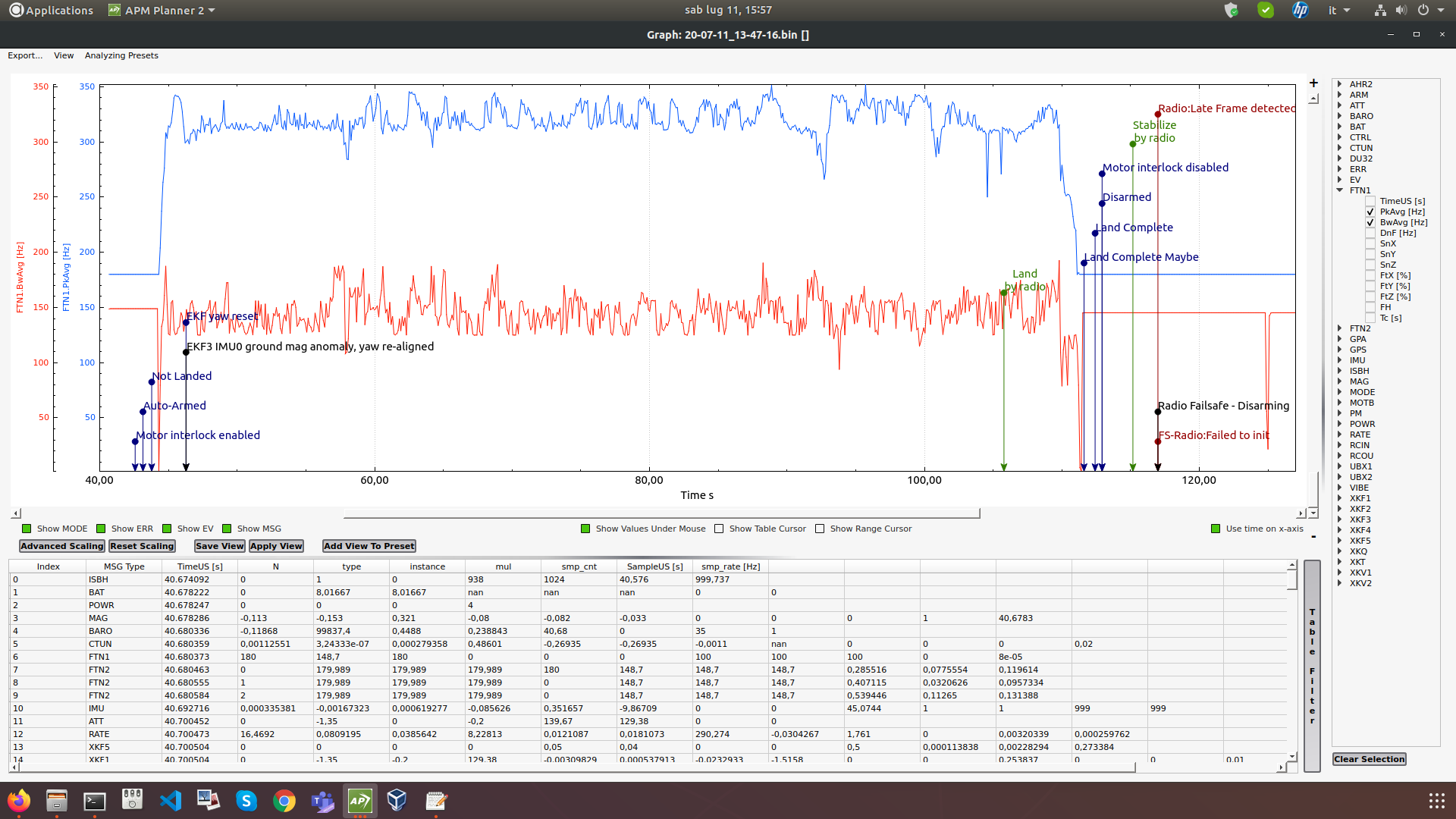
So the FRAM takes a while to initialize, we don’t write out any pages for 2s to cope with this but in 2s you could get enough log messages to fill the buffer and so the early messages will be lost. You could try increasing the log buffer - that might sort it.
You only need to try and capture more harmonics if you are using INS_HNTCH_OPTS=2 otherwise just finding the first harmonic is fine.
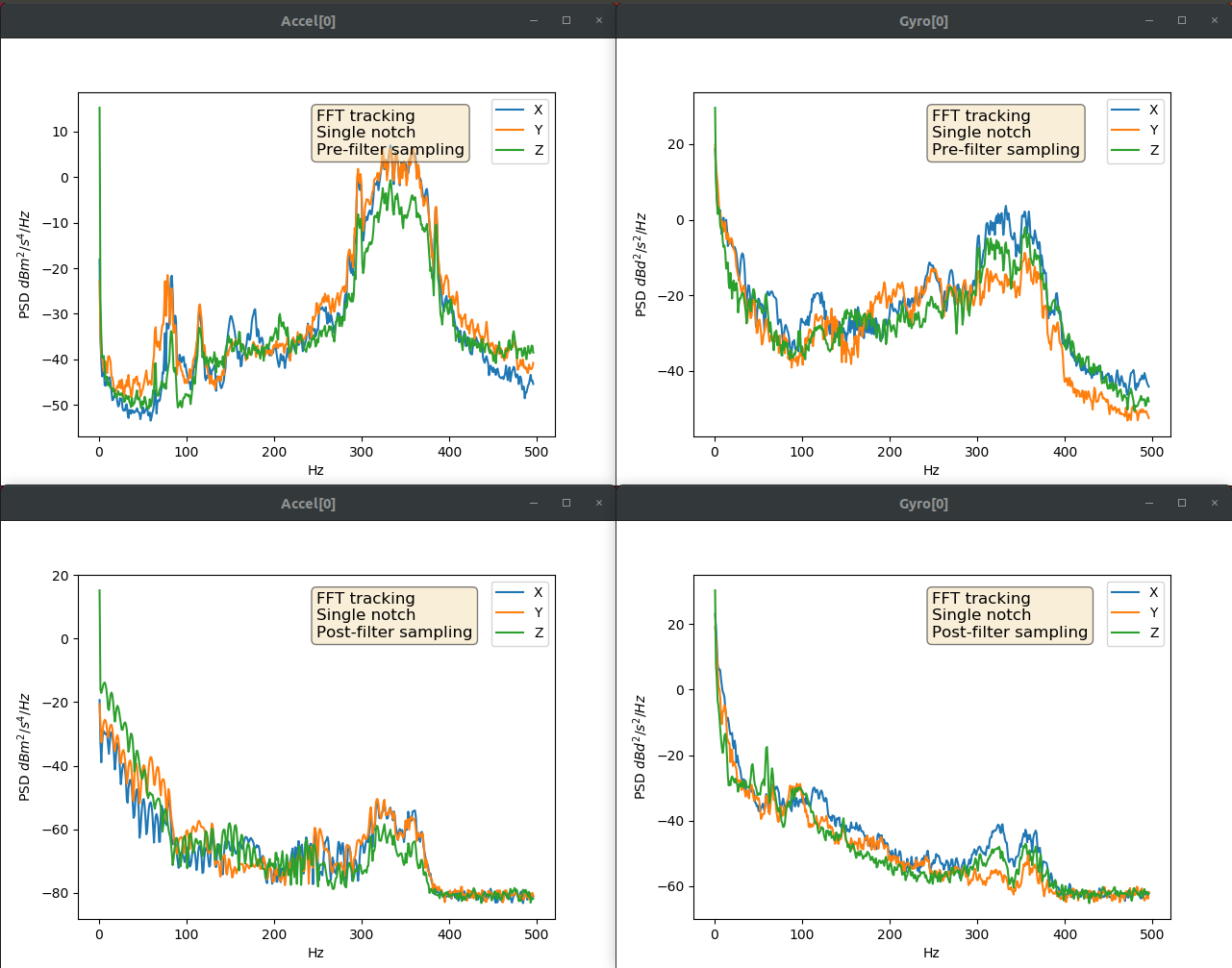
Interesting that your second harmonic is so pronounced.
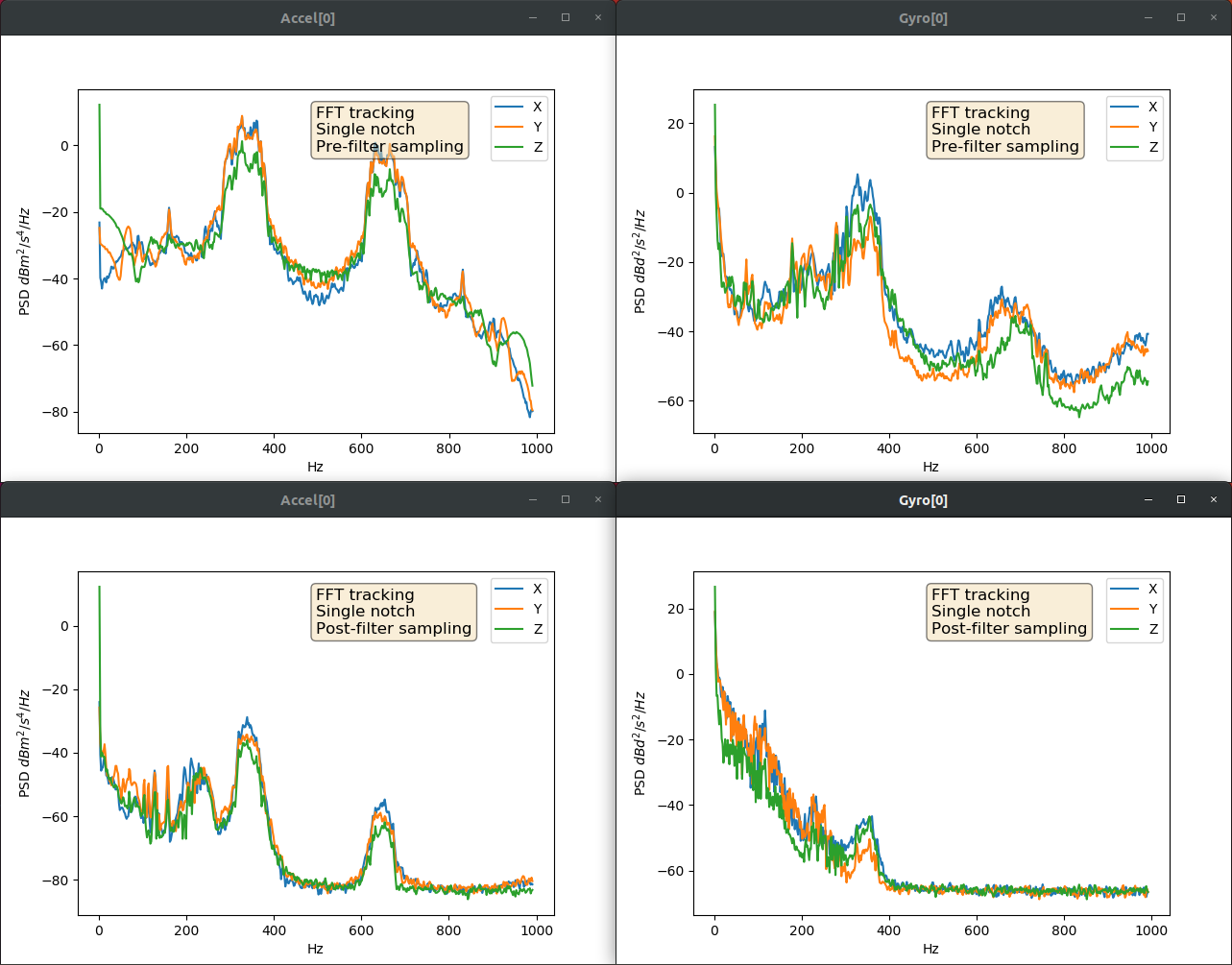
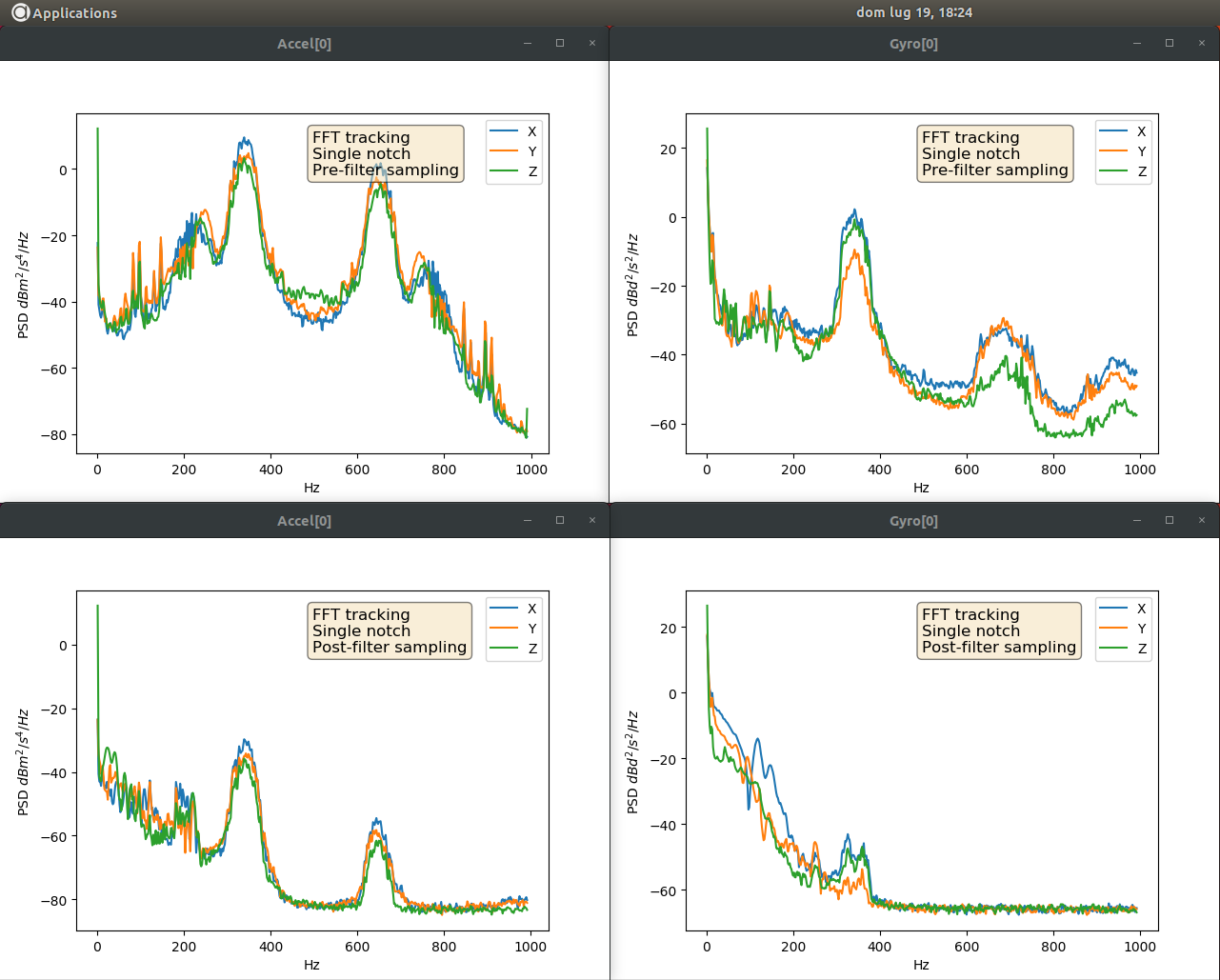
I think probably what you are seeing is the effect of the raw sample rate going from 1Khz to 8Khz rather than the backend rate going to 2Khz. It would also be worth doing a comparison at 1kHz with fast sampling on and off.
That said the post sample noise around 100Hz seems to be higher than pre-sample indicating that it is being added by the notch. One thing to note - when you go from 1Khz to 2Khz your FFT bins will double in width reducing the accuracy. You could increase the FFT length to 64 to compensate.
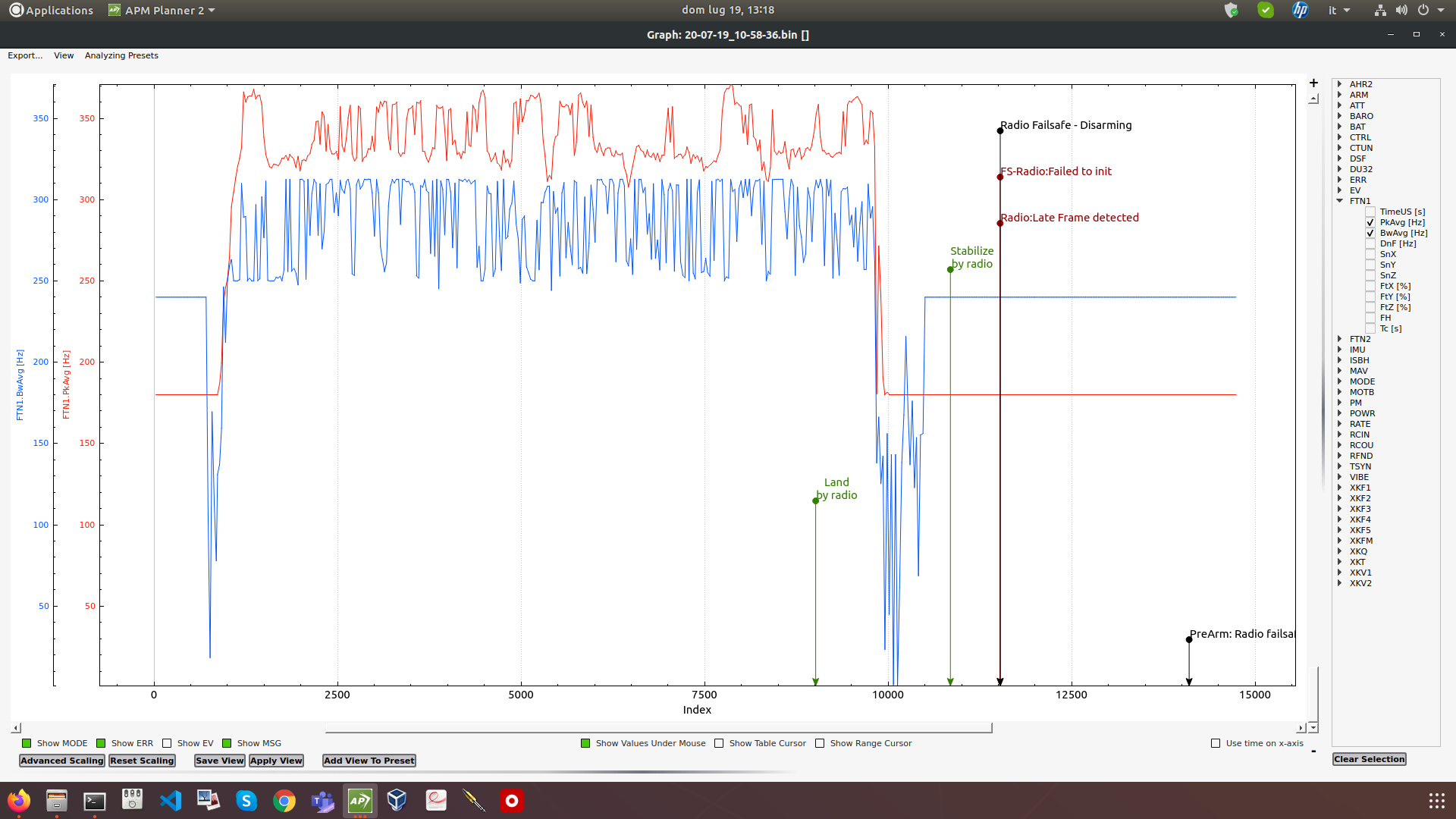
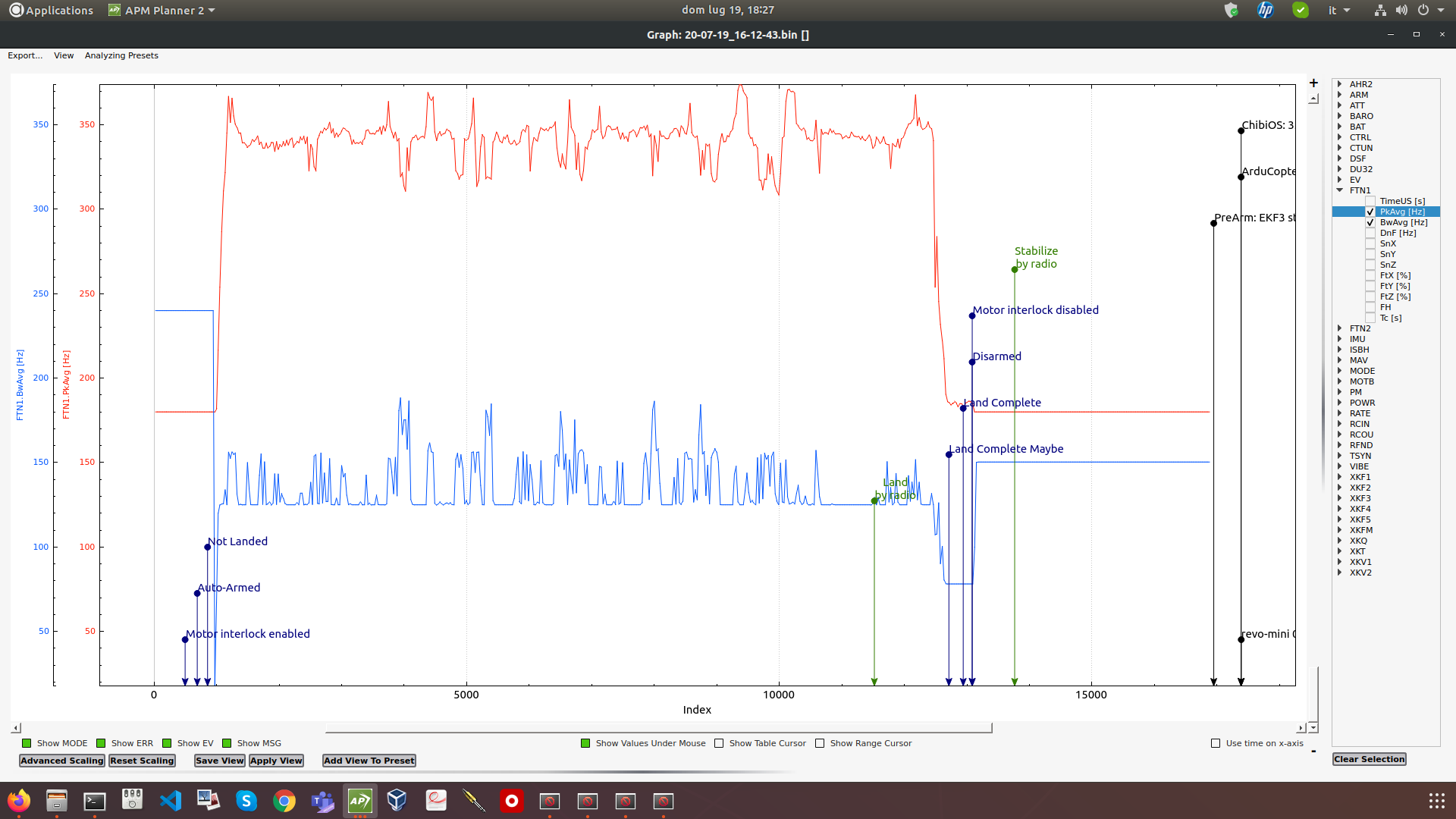
That looks pretty good. The BW will be mainly because - 2000 / 32 = 62Hz, so the BW will only ever be at minimum 62hz * 3 = 185Hz. At 64 your resolution is suddenly 31Hz.
What kind of frame do you have? My suspicion is that the noise at the low end is frame resonance.
Also be careful - on an F4 with 64 FFT and 2k gyros you are beginning to push the limits.
Unfortunately PM.Load is not a good indicator that your gyro rate is too fast. I haven’t figured out a good way to estimate this, perhaps the most reliable is when you lose logging.
@andyp1per
When I set the gyro rate at anything above 2k, as soon as telemetry should start transmitting (when I turn on my RC radio, which is currently doing SBUS, as well as a traditional mavlink telemetry stream), the copter locks up… (By that I mean it is completely unresponsive, the OSD doesn’t update, etc).
If I turn the transmitter off, the copter starts responding again.
Running the omnibus small copter build off your dropbox.
I’ve not seen that. Trying to run 4k on an F4 is futile IMO - you will be killing the CPU I suspect. That’s not necessarily the issue, but it seems unlikely that the gyro rate is at fault here.
I’ll see if I can find any other pattern… At least test if it does it if I disable telemetry, so we know if it’s sbus or telemetry specifically causing it… Or something w/ the combination.
I had been running a 2 or 3 week old copy you compiled for me, which was to test the crossfire/sbus changes, and I think the double harmonic notch was new in that build as well. It worked fine.
Nothing to report at 2k… It worked. FFT goes to 1000 instead of 500. Everything looks and performs well.
Just FYI I recently fixed (with @Leonardthall help) a tuning problem on my 3". Autotune gave me good PIDs except YAW would oscillate at low throttle - not always, but a bit of propwash and high MIX_MAN was enough to set it off. I had to reduce MOT_THST_EXPO to 0.45 and that really seems to have sorted the problem.
Thanks,
That is one of the remaining issues I was having trouble with too. I can’t quite get it perfect yet.
And mine breaks in to oscillations once I lower the throttle after a high speed run occasionally. And, just the occasional twitch… Seemingly for no reason, it will twitch several degrees. I wouldn’t care, other than sometimes I’m trying to film video…
They’re all subtle and only occasional, but I’d love to get it perfect.
Once I have logs that clearly show the issues, I’ll post them… Haven’t had a lot of flying time this summer, unfortunately.
Ok apologies there was actually a bug which was why the sample rate looked wrong for accels. This also meant we were sampling the same accel value multiple times. Note sure what effect this has but I’ve fixed now in my small copter branch.
@wicked1 I am just updating my KakuteF7Mini and OmnibusNanoV6 builds
[Edit]
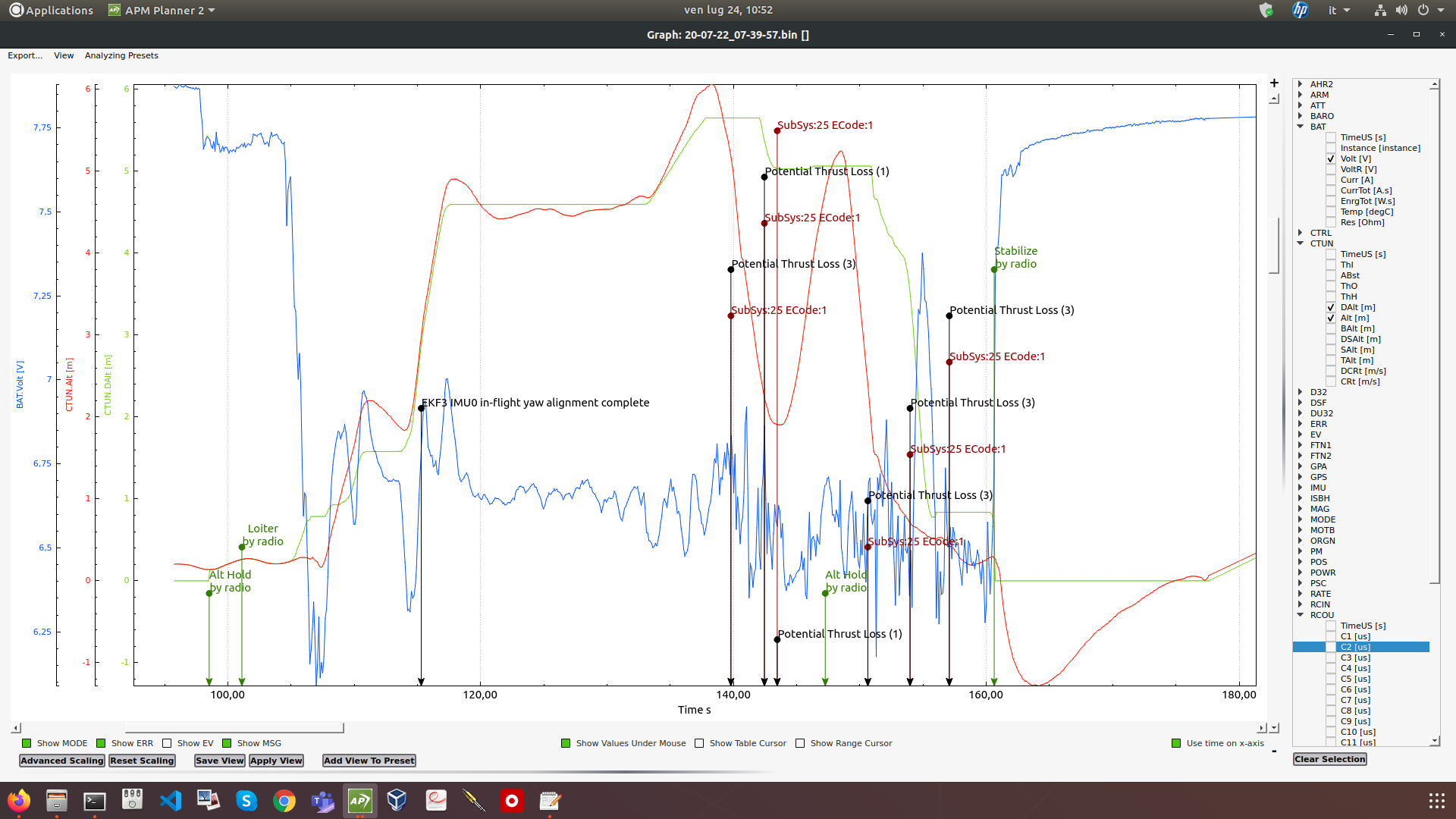
As battery I use 2 18650 Li-ion cell (Sony / Murata US18650VTC5 2600mAh - 30A), they could go down to 3V each without problems.
Maybe they are a little bit old, too much charge - discharge cycles?