I’ve needed to use a shielded video cable in the past. And, in that case, I used an old RC antenna coax cable.
But in the case of the kakute, I’m not sure that will help… it seems to be noise on the power rail. Like I said, on the same copter, a different VTX worked fine while not powered from the FC.
(For all the info, it is a 2.4ghz vtx, and the one it replaced was a unify pro 5.8vtx. I doubt the change in frequency matters for the noise, but that is a difference)
Side topic… I’m loving the 2.4ghz video! twice the range for the same power. And clearer picture! (not sure why… 5.8 has more bandwidth and likely less interference in my suburban area). But, 2.4 breaks up more severely. I always got snow and more snow before the picture went to static w/ 5.8, but 2.4 will go from clear picture to solid static at times.
TrueRC ‘singularity’ 2.4ghz antenna is about the same size as an old traditional 5.8 antenna.
I added a big fat 25v 470uF on the 5v rail because I didn’t have anything else and it seems to have mostly cleared it up. I think the antenna was also getting in the shadow of the copter and raising that a bit seems to have help. I also got time to do a proper tune and am pretty pleased with the results. The F20-II’s on 4s are insane!
Looks great! I wish I had an open place like that to fly! Although if I did, I might have never started with these microcopters… That was born out of necessity in my densely populated area.
Have you noticed what speed you’re flying? My average high speed run is around 100kph. Some days I can only reach about 90, and others get up to 120 or so… Depending on wind and I guess how level I’m flying… I’ve never done any official top speed tests… Just flying around.
I’ve been up to 120kph or so on my QAV180. This is the first time I’ve pushed this one and it felt faster. GPS says I got to 32m/s which is 115kph. BUT this is with throttle at 0.55, so I think there is room for improvement!
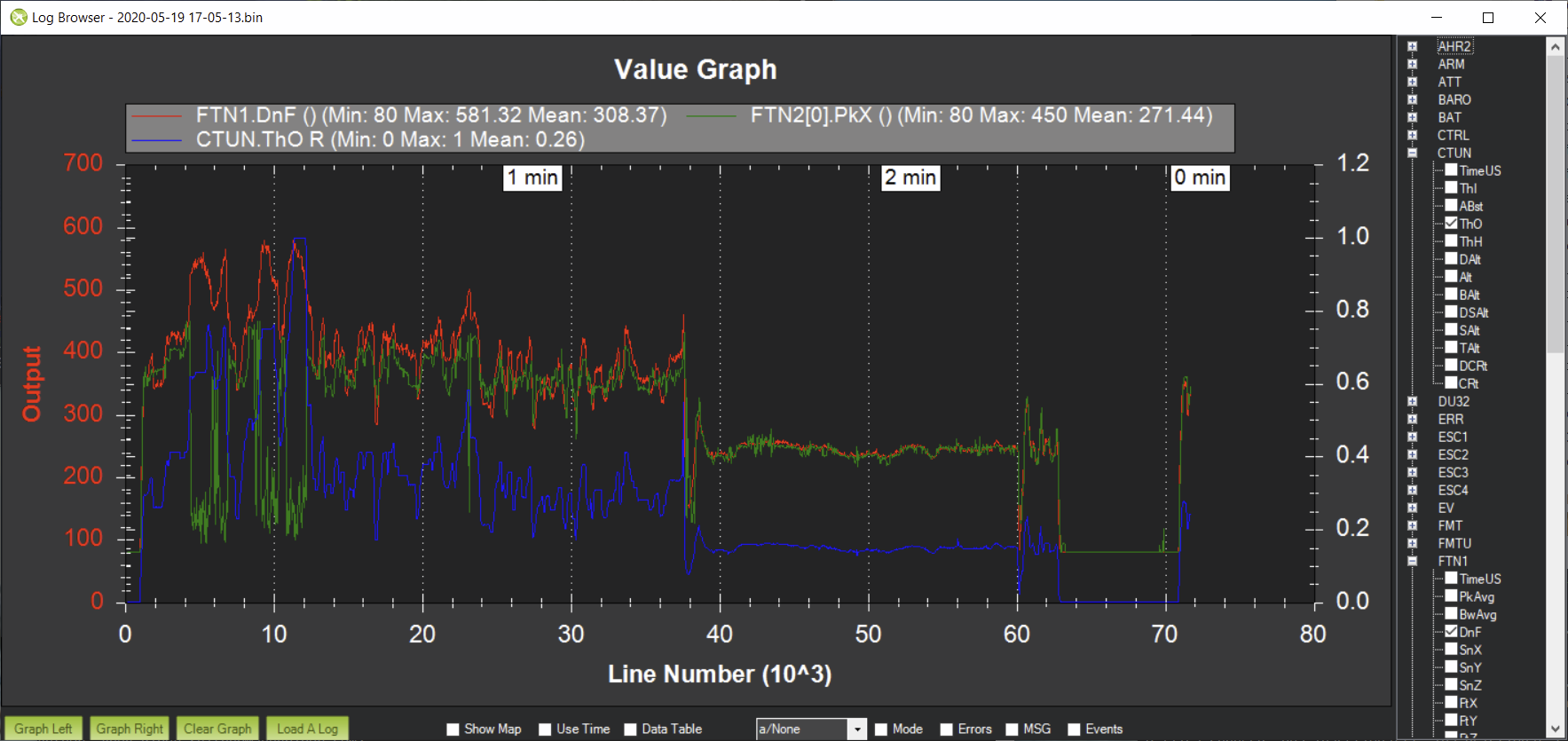
The other insane thing is that the motors are getting up to 500Hz which is the Nyquist frequency for the gyros with regular sampling. No idea what happens if I go over.
You can see I blew through the old Nyquist frequency early on, fortunately I was running with my patch that allows a 2kHz backend rate so all was fine. You can see what happened to the FFT when it hit the maximum I had set of 495Hz, fortunately I am using ESC telemetry on this copter.
Looks great! Wonder what happens if you try that w/ the ‘new’ version of the FC w/ mpu6000.
I’m not using master at the moment and don’t know exactly what the graph is showing… FTN1.DnF looks to be the motor frequency. What’s FTN2.PkX? Is that the frequency it would try to use if you were using FFT to set the frequency instead of ESC?
That is a fast little copter you’ve got!
Full throttle flights were always a bit scary for me… The copter got a bit twitchy. But last week I adjusted the mot.thst.expo param and retuned it. I lowered the expo param to about .43 for my motors, and it’s great! Full throttle is just as smooth as a gentle flight. I’m burning through batteries a lot faster because I don’t realize how fast I’m going
It is… I didn’t come to that value the correct way by testing my motors. But I increased it, and it got worse. I decreased it and it got better. I decreased it more until it started having other issues (slow oscillations at low throttle), then increased it again. Anyway, my more powerful 1402 motors seem to like about .46, and my weaker 1103’s like .43.
Hah, I tend to do the same when just flying around w/out thinking about much. Counterclockwise circles for some reason.
Want to mention, I stiffened the arms of all my little microcopters, and it helped them all! Much smoother. I glued pultruded carbon fiber rods to the arms.
Here’s part of a flight from yesterday. This is not one of my better tuned copters… Just one I took off the shelf and stiffened the arms, and wanted to see how it flew after that. Battery lasted 8 minutes which is unusual. Either stiffening the arms helped, or I guess more likely, I was flying in a new area and a bit nervous, so was probably flying more conservatively than usual.
This is my new property! Going to build a house here eventually. My current daily flying location is suburban with roads in a grid pattern and plenty of landmarks to get my bearings. It was sort of terrifying flying over woods like this. It all looks the same, and copter would likely get stuck in a tree and lost forever if anything goes wrong.