Thanks @Alberto_Ds, anyway that was not an issue with Copter 4.0.0 but only a wrong habit of mine that was OK with 3.6.x but not with 4.0.x. as explained here.
1 Like
Hi all … For optical flow on 3" quad, which is best choice?
Thanks
€ 10,50 8%di SCONTO | Flusso ottico Spot del Sensore di Posizione di Volo Di Telecomando In Bilico In Possesso di Bordo del Modulo Costante VS Cheerson CX-OF Supporto APM
https://a.aliexpress.com/nQ7LsuMjh
€ 12,88 6%di SCONTO | 1PC 3.3V 1.1*1.4 centimetri 1g Sensore di Flusso Ottico Modulo Aerea Modello Accessori Per Il MINI FPV da corsa del RC Drone Quadcopter Pezzi di Ricambio
https://a.aliexpress.com/OfpnI5G3t
Hi, I have a new 3" build, but the same problems! Roof rocket in althold. With omnibus nano v6 I have a log and I can see the graphics of vibrations … It’s too high?
Thanks 
log added
1 01-01-1970 01-00-00_rocket.bin.log.zip (704.5 KB)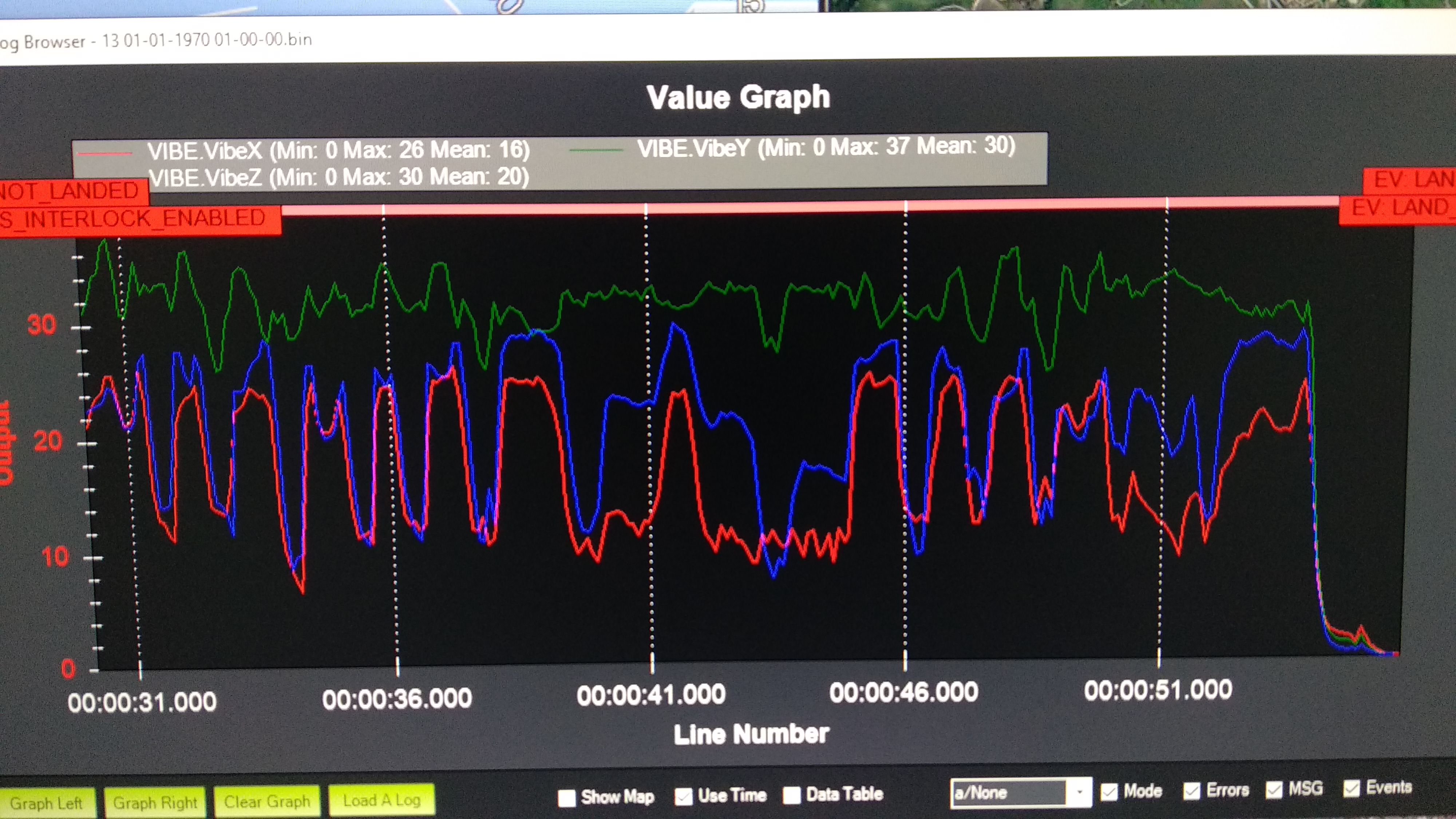
That log is incomplete/corrupt and it wasn’t hovering long enough to determine levels of vibration. Attempt a hover in Stabilize mode and post a link to that.
1 Like
Apropos of nothing I have discovered that both the KakuteF7 MIni and the Tekko32 mini have a conformal coating - which is very cool.
That’s good, and I think it’s becoming pretty common. (At least a bunch of ESC’s I’ve got are coated… Speedix, Aikon, etc). More than just water resistance, protecting from conductive dust and other debris is important.
I think waterproofing one of my little copters is my next project.
I’ve played around w/ it a bit in the past, and haven’t found the thin silicone conformal coating to be 100% water proof… But maybe need more coats. I’ve seen peoples copters where they basically plasti-dip the entire thing… But that’s adding considerable weight. And getting something to adhere to silicone insulated wires will probably be an issue. I’d imagine almost everything will release and water will get under the coating at the wires. There are a lot of little details to work out.
Maybe vacuum forming a shell for the copter and waterproofing the seams is a better route to take than sealing all the PCB’s…
Did you get a new small copter built after your accident last month?
Most of the parts arrived this week and I got a variable temperature soldering iron for Christmas, so having done it once I am pretty much most of the way through not repeating the mistakes I made last time.
I’ve used acrylic conformal coating in the past because you can solder through it easily. Not great for wires though, but maybe nothing is.
I just finished a copter today that I’ve been working on all winter… Supposed to be the final product of all the testing I did w/ other copters over the winter (testing the new kakute mini and all the vibe issues I was having, etc).
This copter has the least vibrations out of any of them… But it has the lean issue very badly. It’s not really flyable w/out GPS signal, because for whatever reason, having GPS makes the lean issue go away for the most part. W/out GPS, it’s pitching forward and leaning to the left more than I can compensate for, after I’m flying for a couple minutes.
I really don’t get it. Vibes are around 5 in the logs. My other kakute mini copter I was working w/ all winter is 15 on average and peaking to 30+. It had the lean issue, but much less than this.
Maybe I’ll try rounding up everyone w/ the issue and see if we can get logs and figure out if there’s anything we can do about it. Marty was recently posting about the issue on his copter and me and a couple other people quickly blamed vibrations. I was completely sure it’s vibrations. On that last copter, as I fixed the vibrations, the lean issue did get better. But now I’m not sure again. I don’t think it’s possible to get them lower than they are. so frustrating.
I got the ts100 portable temperature controlled iron to put in my backpack for repairs while I’m out. But it’s really great! I use it for almost everything now.. other than when I need a very hot iron.
Hi Alberto
Sorry if I repeat myself:
Are you using rubber grommet to dump the FC?
Are you using foam to cover the baro?
Next step dynamic notch to filter vibrations.
Hi Andrea, obviously yes!
I used the ones supplied with the nano v6 omnibus and rubber ring on the nylon stand off. Double foam on the barometer. I thought a 3 “was less critical than a 2”.
I’m waiting for the usual, I think they are indispensable on any nano copter
I have a question about these parameters, that i have setting in this way on my 2" quad and 3" quad:
ATC_ACCEL_P_MAX,125000
ATC_ACCEL_R_MAX,125000
ATC_ACCEL_Y_MAX,30000
I can’t find anything on threads about defalut param on sub 250
What the right setting for 3" quad?
Thanks ![]()
1 Like
Auto Tune came up with ~ 37xxxx (P_MAX & R_MAX) for a 3"
1 Like
On my 3" quad with 1104 5400KV motors and 2S battery I have:
ATC_ACCEL_P_MAX,240000
ATC_ACCEL_R_MAX,240000
ATC_ACCEL_Y_MAX,40000
1 Like
I set them to 0 - which means basically go as fast as you can. On big copters this is a bad idea because you can overload the motors but on small copters I don’t think there is much of a downside. Autotune will set these base on the fastest response it sees from the vehicle when twitching.
2 Likes
Ok … Thanks a lot.
Now the problem is flow hold with CX OF optical sensor. In final part of this video the quad have fast oscillation like wrong PID.
has anyone had the same problems?
Can you get a log? It would easier to tell which axis is the problem - otherwise looks like D-term feedback to me, so reduce your D-term by 1/2 on each axis and see if that helps.
Yes ![]()
In stabilize and alt hold now flies well, but the problem is only in flowhold mode with optical sensor
I don’t really understand flowhold, but you appear to have a lot of noise on the sensor:

What are your flowhold settings? I would try more aggressively filtering (i.e. reduce FHLD_FILT_HZ), but I am not sure how a small copter would respond to those kinds of changes.
Thanks Andy, my flow hold setting is default like wiki, and i force to 3 EK2_GPS_TYPE.
My FHLD_FILT_HZ is 5
EK2_GPS_TYPE = 3 to force the EKF to only use the optical flow sensor and not use the GPS