I can’t take all the credit here. Yes I did most of the coding, but it was ctsznooze from the betaflight team who brought to my attention how radically a dynamic notch could affect copter control and then it was @Leonardthall who encouraged me to work on it since he believed our throttle estimation was good enough to get pretty close to what BF are doing with bi-directional dshot. Leonard also did all the behind the scenes arm twisting to get the change in.
Credit for the ESC telemetry-based notch should go to a couple of bottles of Hoegaarden which made me believe that actually writing that piece of code shouldn’t really be too difficult.
I’ve found that the difference in battery life between 25oC and 10oC when punching out is huge. I can do full throttle for 3min on 4s in the summer but that’s down to about 1min in the winter.
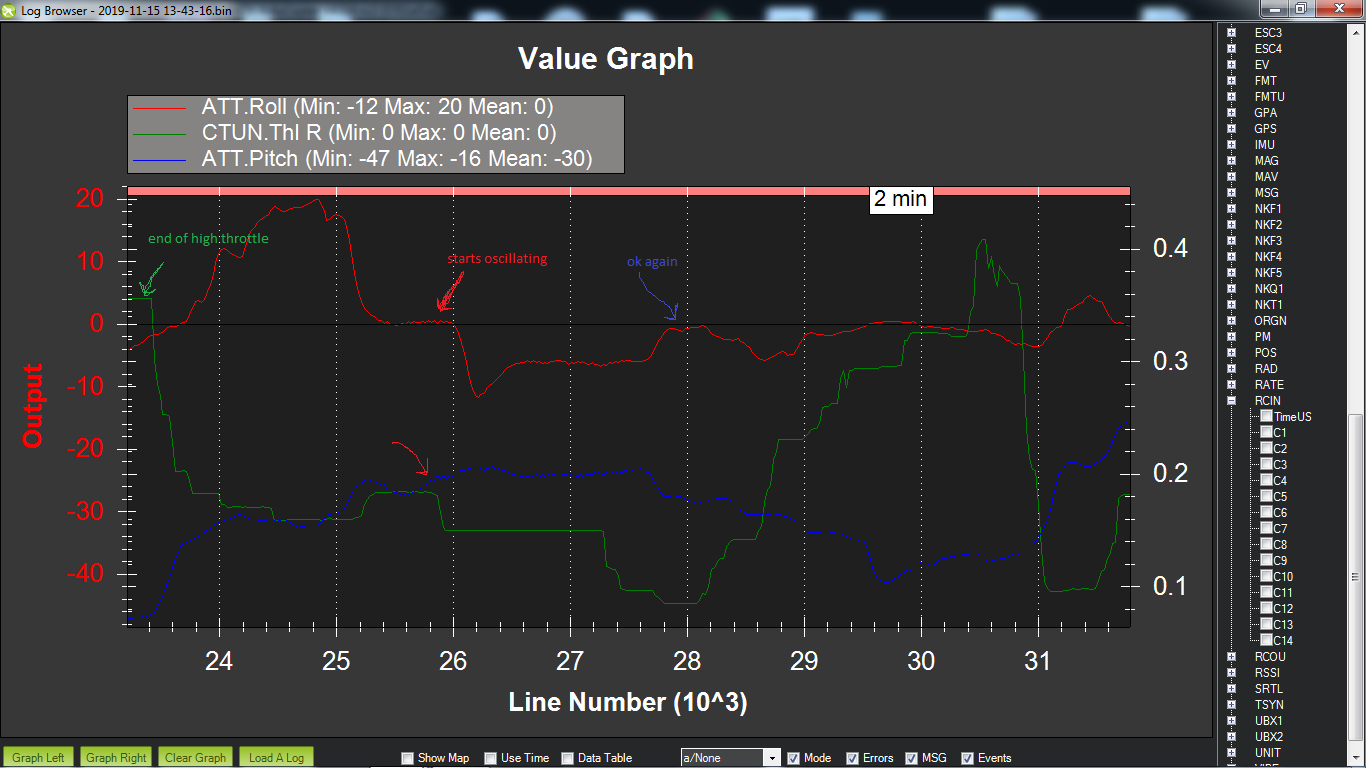
Anyone know what would cause oscillations after a full throttle run?
Flying at full throttle is fine, but when I stop and go back to a hover/slow flight, it oscillates at about 2hz for several seconds… Then it seems ok again.
My little copters have always done this… I’m on 4.0rc2 now. But it was the same on 3.6/3.7.
I don’t do a lot of high speed flying, so it’s not really an issue… Just wondering if anyone has any ideas of what to look at. I know betaflight changes some things about PID’s based on throttle… I’m not sure if arducopter is adjusting something due to my full throttle run, then not re-adjusting quickly enough afterwards.
Or if I just need to lower my PID’s… But then, like I said, it’s fine while going slow. It’s fine while going full throttle. It’s just not OK for a short period after full throttle.
As usual, logging was disabled on this recent flight that prompted this post. But over the weekend the obvious next step is logging some full throttle flights. I’m not sure what to look for in the logs, though, either.
So oscillations at full throttle are because you don’t have MOT_THST_EXPO set correctly. Basically if you haven’t linearized your thrust correctly then the response that you have tuned for at hover is different at full throttle. That said, I have found correct linearization then makes the throttle-based harmonic notch be way out at full throttle - which is the main reason I prefer FFT on my copter that doesn’t have ESC telemetry.
Oscillations after full throttle sounds weird. What mode are you in? I have found that full throttle runs mess up the EKF and take a while to recover from (because of vibration) so it could be that.
Very odd. I think you probably need @Leonardthall to take a look. The oscillations are showing in the gyros, and the gyros look more noisy in that period - but is it cause or effect, I’m really not sure. The notch seems to be tracking well and your ESC’s all seem healthy.
Has someone done an Autotune with 4.0.0-rc2 ?
Yesterday I did it on my copter for roll and pitch, then (to be sure parameters was written) I see the new ATC parameter with Tower on my Android phone and then I power off the copter. When I went back home, and I read parameters with APMPlanner2 via USB, I see the old parameters, those before Autotune.
Wow! You guys are making this so easy for me ! I used Paul’s log params and bingo first time on reboot.
Snow on the ground and I never conformal coated so that is this afternoons project. Using Mg chemicals stuff. I have tuning fever.
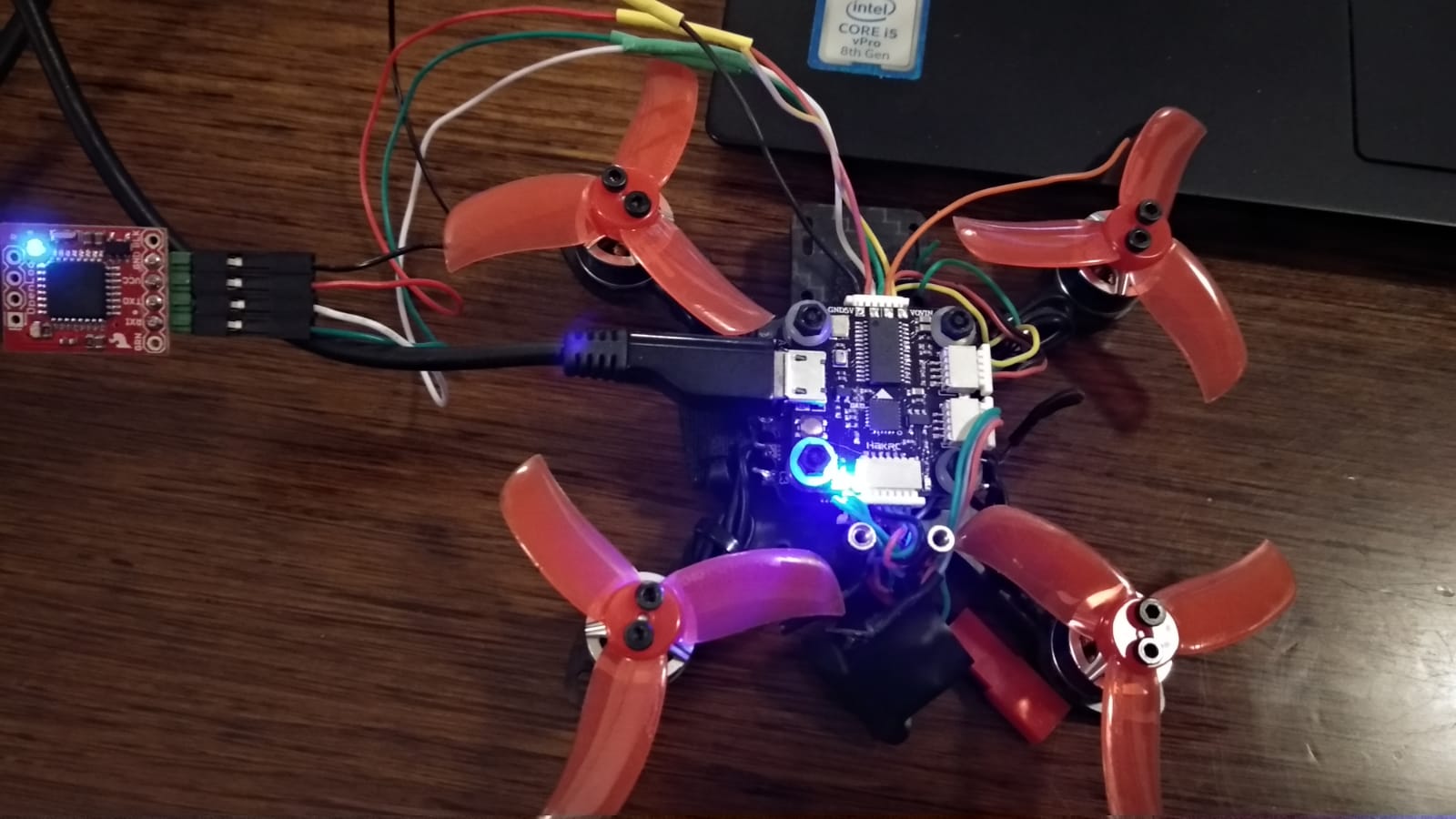
I read Andy’s filter wiki this week and it got me all excited. I was very interested how easy MOT_ THST_EXPO could be when using esc telemetry. I set up using BLheli pass thru with Ori 32 some time ago. This led me to reading the esc telemetry Chibios wiki and the esc telemetry thread going on currently on this site. I am still unclear if esc telemetry is possible on f4 nano v6 with Ori 32? The big boys were talking mostly about f7 and that even seemed to be buggy and glitchy to the point of losing logging and even some boards.
Maybe I should stay away from that awhile, even if it is possible. I feel very grateful to have logs.
ESC telemetry is down to the ESC not the flight controller. Your ESC needs to have serial based telemetry support…a quick gander at the Ori32 looks like it does not judging by the pinout. Bi-dir dhsot will eventually help, but that’s not support as yet.
Yeah , I’m not going to mess with it now. If people are having problems with the voltage and current accuracy how confident can they be about motor rpm? I’m going to go with the seat of the pants feel and Math.
People seem to like that ESC, and I know people here are using it with Arducopter…
I tried it… It worked… telemetry worked. BUT… It cuts out at about 7v, so doesn’t work on 2s, which is what I need.
Yes, its not well calibrated, but apparently there’s a way to adjust the current calibration in the BLH Suite software…
I haven’t found any ESC that’s accurate over telemetry out of the box, unfortunately… The one I’m using now is about a volt off on its voltage measurement, and the voltage calibration in MP doesn’t seem to affect ESC voltage. So, mostly useless for me.
RPM seems accurate… that’s just measuring pulses… Not doing any sort of analog to digital conversion or anything.
I may still try it, as there is no flying weather in the near future. I have new problem, conformal coated new micro telemetry board that has integrated pcb antenna. No telemetry after coating antenna side.
Did you just set parameters in MP to get it working or actually move wire? Did you see esc telemetry in status under hud in MP or just in logs? Also, does mavlink2 require flow control wires?
This really would be handy for setting harmonic notch frequency in gyro noise wiki. Current would also be nice but not really necessary the way I fly
Can’t comment on the specifics of your ESC, but if you have it configured correctly telemetry should show up in MP if you are using mavlink2 which is the default. Flow control is not required for mavlink2. For my ESC the wire was already properly connected to the RX pin, but my ESC and FC come as a pair.
Thank you Andy, Both Airbot f4 nano and ori 32 are intended to be paired with cable and supposedly esc telem works natively with Betaflight. I’m going to give settings in esc telemetry docs a whirl but thought maybe only having 4 wire telemetry would be a deal breaker.
Check the pinout of both the PCB and the FC… All the pins you need are there… But the cable might not be correct. For telemetry, you just need the TX from the ESC going to the RX on the FC.
That RX pin on the omnibus nano v6 is I believe serial 4 in betaflight, but it’s serial 2 in arducopter…
So, where you set serial protocol 16 is in on serial 2
SERIAL2_BAUD,115200
SERIAL2_OPTIONS,0
SERIAL2_PROTOCOL,16
Hi all,
To get a log, I’m trying an openlog card with SD card. I connected the serial 3 to the card (instead of the GPS) and gps strings are written on the sd. I changed the protocol to MAVlink to get a Tlog but it doesn’t seem to work. Has anyone tried such a thing? Thanks