Wow, that’s great!!!
Let me know if you need any ‘testers’ :). I’d buy a board from you.
Is that designed to work w/ a specific FC, or have you designed your own?
I use this to mount my FC:
I removed its thin adhesive layer, on each side of the gel, and use some really strong 3m double sided foam tape on each side of that gel pad. And that’s definitely strong enough to hold my FC in place.
So basically, the ESC on bottom has the screws in it. Then the gell pads are taped on to the tops of the screws on the bottom, and to the screw holes on the FC.
Thanks! we are working so hard on it and its only the first prototype of our 3" version. The FC will be
completely integrated in next revision. ATM its just plugin in the center part, we have already it, its a pixracer F4 based.And thanks to the “old” 3.6 @andyp1per corrected notch filter we don’t need any imu dampening anymore! @andyp1per yours filtering support are solving all past IMU various issues, we are really with no dampering and rock solid plus great agility with our 5" version. “Prior the notch era” you created, it was not possible.
Glad to help, I had fun 
1 Like
I’m waiting for the standoffs from banggood. The rings arrived first, I will try with a double ring. Thanks!
@andyp1per What are the commands to enable the Notch filter? Thanks! (1104 7500Kv motors 2s props 2")
Good idea for damping and hold in place the FC … in same time! Thanks
Thanks Andrea! Can I try something without a log?
If you don’t have logging and don’t have ESC telemetry you can guess - which I don’t really recommend or I’m happy to build a version for you with my FFT support.
My writeup is now published on the wiki:
http://ardupilot.org/copter/docs/common-imu-notch-filtering.html
5 Likes
Cool Giorgio, do you have your 5 vers comercially? you have the idea to sell the board alone or is for a full complete quad?
Andy, I would be happy to try your DTT version !! Thank you very much! 
unfortunately at the moment I have no log and telemetry esc 
What build target do you need?
One that works well on a quadricopter frame 90mm 2 "props 2s 450mA esc blheli 300 FC mini HAKRC F4 clone OMNIBUS F4 PRO.
Thanks!!
1 Like
Andy, without esc telemetry and log, can i try this procedure?
Thanks
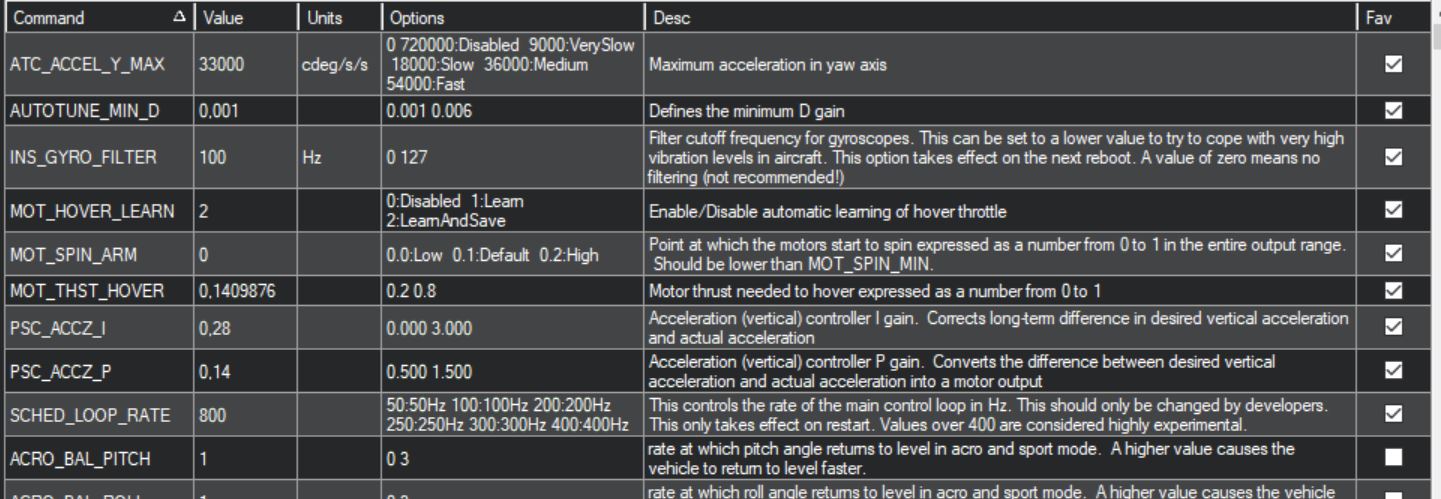
MOT_HOVER_LEARN = 2 and read off the value of MOT_THST_HOVER
This gives you a hover motor frequency hover_freq and thrust value hover_thrust
Harmonic Notch Configuration
Set INS_HNTCH_ENABLE = 1 to enable the harmonic notch
Set INS_HNTCH_REF = hover_thrust to set the harmonic notch reference value
Set INS_HNTCH_FREQ = hover_freq to set the harmonic notch reference frequency
Set INS_HNTCH_BW = hover_freq / 2 to set the harmonic notch bandwidth

Thanks! Atm we are thinking to make some collaborations with interested labs (mainly for academics research probably in swarm robotics and swarm intelligence), btw write me in PM, don’t want to waste here with this.
1 Like
I’ve missed a lot of reading lately, My first flight with Wickeds params was reasonably successful, uneventful but not remarkable.
The first issue was a persistent wobble but little quad was controllable. I worked on some COG and vibe issues to no avail. That night I read andp1per first few post about INS_HNTCH_enable. The next day I enabled to 1 and it was the magic button, no wobble and motors smooth as silk. I see he has posted much more detail about this and understand I need to comprehend it.
My latest issue is the weather here in Michigan, I really want to get this thing flying correctly, serious itch. I was wondering if anyone had experimented with the barometer temp compensation params with f4 nano v6.? Are they effective with this board? I was thinking maybe I could still tune in the morning in cold temps before the wind comes up. How worried should I be about condensation if I do temp compensation process in doc’s when it’s 38 deg F.?
Also it appears there is data flash logging on f4 nano v6 as I see wicked has bin. files? I missed all that somehow. So if someone could point me the way to some reading about that it would be appreciated. Thanks to all.
I don’t know about barometer temp compensation… I’ll have to read up on that.
But, I fly in sub freezing temps all the time w/out any issue. I’ve seen several people make posts recently about being afraid to fly in the cold, and for me, it has never been a problem. Only issue I’ve had is my battery sagging a LOT more than it does in warm weather. (On 2s, where I’m at the lower limit of the ESC voltage range, that can be dangerous)
For logging, you need to set the log backend type to 4. It’s not an option listed in Mission Planner, but just set it to 4, and it should work. After you set it to four, then reboot. Then go to dataflash logs in MP, and clear the logs. Then try arming and see if it actually makes logs… it should. The onboard flash is only 16 megs, which fills fast. And the logs become corrupt when it fills. Just be aware of that… If you want to be sure you get a useful log, clear the logs before flying so you have plenty of space.
Andy has got to be loving all the recent posts about how this filter fixed everyone’s problems :D.
You should auto-tune, if you haven’t. It’s good my params got you in the air, but I’m sure your copter is different and needs a different tune.
here are sample log params, for reference.
it sometimes takes several reboots for log to appear, it is a bit glitchy with current master. you can try for the test to set disarmed log to 1 to see how it works for you.
LOG_BACKEND_TYPE,4
LOG_BITMASK,958
LOG_DISARMED,0
LOG_FILE_BUFSIZE,8
LOG_FILE_DSRMROT,1
LOG_FILE_TIMEOUT,5
LOG_MAV_BUFSIZE,8
LOG_REPLAY,0
Wow! Super time saver! Thanks guys! This is going to help make things so much better.