Not sure. Tridge has shown some interest and Leonard is on the case - so I’m hopeful.
So I took a look at your log. I think like me its your gyro bias that is the problem:
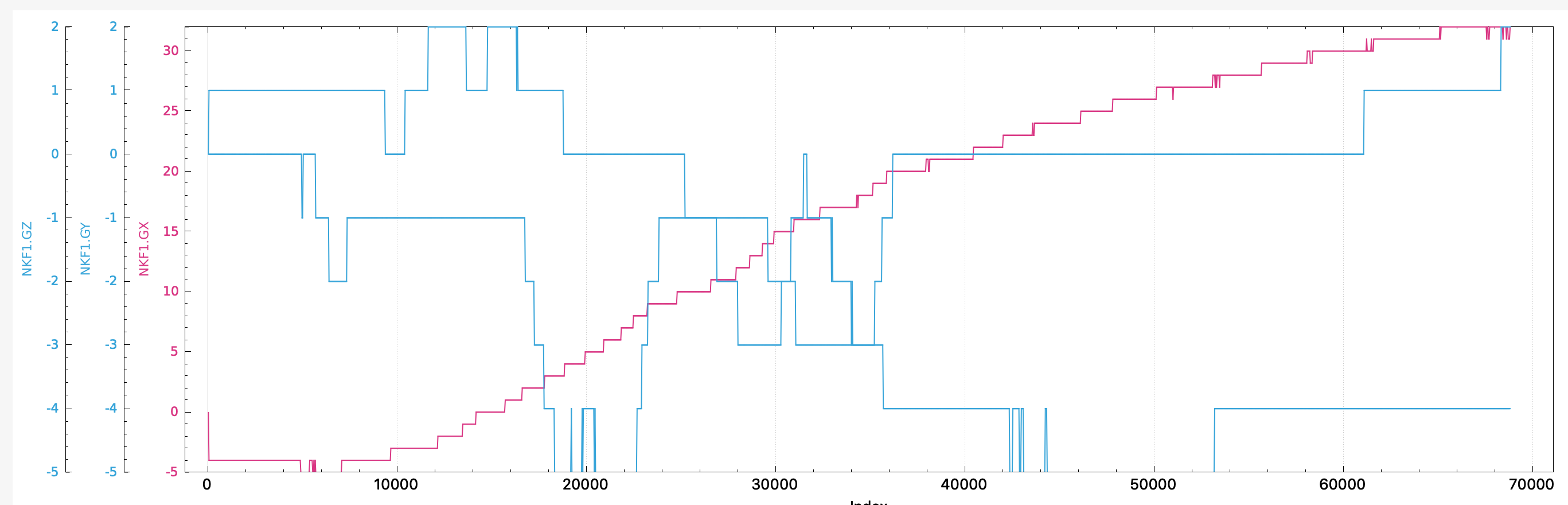
GX is the roll axis so you are getting a large learnt gyro bias and I suspect this is why you are getting a lean and also why lowering the learning rate makes things better. I have no idea why these small copters have this problem although I suspect the issue is vibration.
Thanks a lot.
So I guess I should lower ek2_gbias_p_nse?
I was actually messing w/ ek2_abias_p_nse before… Maybe I lowered the gbias, too… It’s been months.
I’ll try it… I’m doing some indoor test flights at the moment, and it is leaning…
Dunno, the EKF is a mystery to me - looking through the history of this channel I see ABIAS cured things as well. Your ABIAS also seems bad! But I can’t see anything else that would explain it and given it’s on roll seems likely. Give it a go I guess. You used to be able to turn off bias learning but maybe that’s not possible now.
One thing w/ abias, some of it is temperature drift… If you power up the copter for 5 minutes or so, you’ll see it increase a lot… But if you reboot while it’s warm it likely won’t change much after that.
Hello to all,
I’m always struggling with my 90mm 2 "prop 2s 450mA FW3.6 quad. In stabilize it flies well but in alt hold it goes full throttle to the ceiling (I put a cable to avoid the ceiling crash.) I also mounted the rings but nothing has changed.If I start in stabilize and then change to alt hold a little seems to fly well, but then the engines go full throttle : (((
I attach my parameter file. I don’t know what to try anymore  althold crazy rocket roof.param (15.3 KB)
althold crazy rocket roof.param (15.3 KB)
I’ve done 45 flights so far, but I haven’t solved it!
Switch to 4.0rc2 and use the harmonic notch. I’m willing to bet most of your problems will disappear.
I will definitely try … can it work even without a log?
I set the arming flag on barometer and weapon regularly also in alt hold. With this I can exclude a fault in the barometer?

For omnibus F4 pro, i found in beta only this:
4.0.0-FIRMWARE_VERSION_TYPE_RC
It’is OK?
Thanks 
Yes is RC2 … sorry
@Alberto_Ds from what I see your FC damping is not enough, with the rubber standoff posted above I went from roketing to ceiling to stabile althold.
@andyp1per while I think that your harmonic notch Is awesome I think that the behaviour seen from Alberto Is due to vibration noise to accel not gyro.
You are definitely right, but at least part of this will be mechanical linkage caused by noise on the gyros. This is why when you enable the notch the noise on the accels goes down even though there is no change in filtering on the accels.
Anyway I think that good mechanical damping + hnotch = perfection
@Alberto_Ds you could also try putting 4 of those o-rings on the top of the FC as well as the bottom. Currently you effectively have a hard mount from the nylon nuts on top.
Right, One o-ring above and one below the board for each hole and M2 screw to have no hard mechanical coupling.
on this topic I could testify that me and Guglielmo are using notch filter on the accel, and it eliminates all issue for the Alt Hold in our little copter
Are you using PR from @guglie?
https://github.com/ArduPilot/ardupilot/pull/11515
Have you re-tried with vanilla 4.0rc2? If you look at my results with ESC telemetry you will see that the accel also is completely flat and this is without a notch on accel -
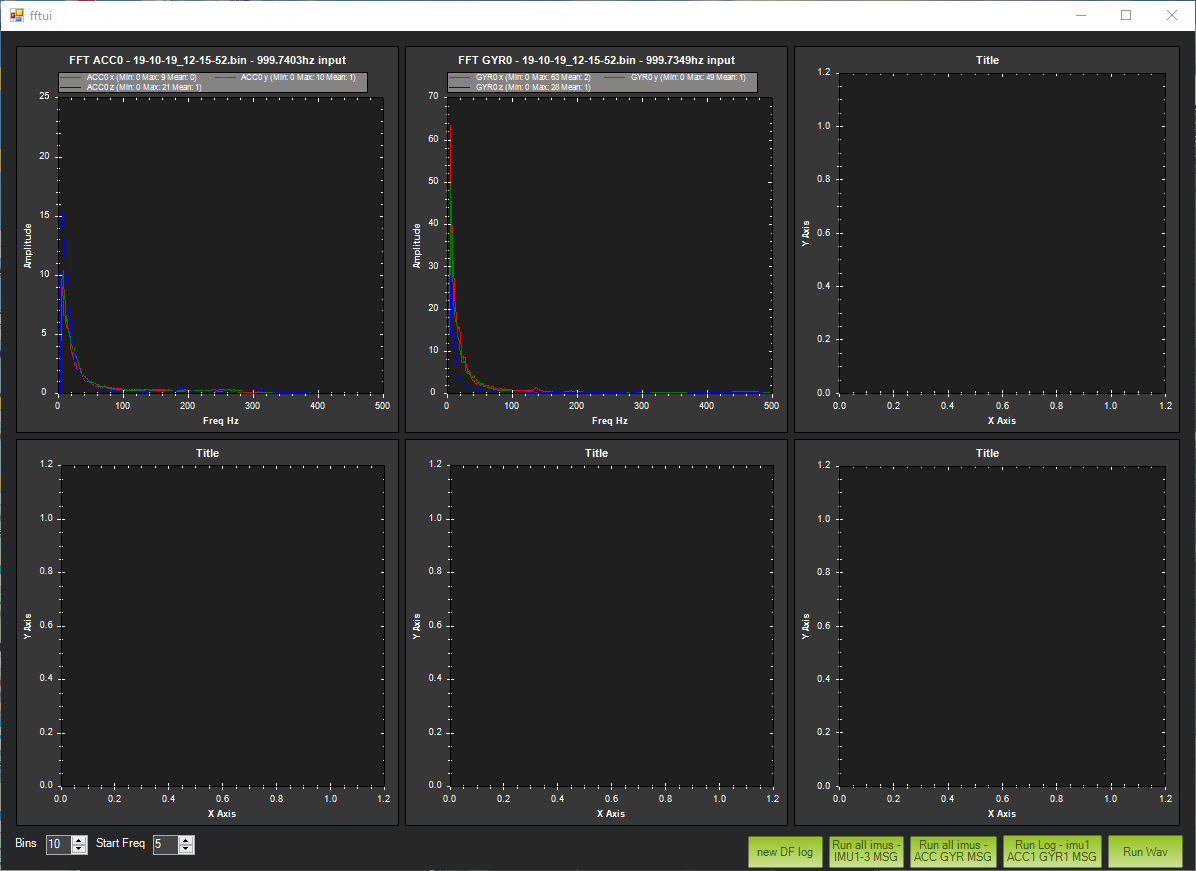
My AltHold is rock solid…
1 Like
Not yet unfortunately, me and @guglie cannot wait any longer to use it! Thanks @andyp1per
We was so busy, also preparing our new 3" test rig with bidirectional BLHeli32, even DShot 2400.
5 Likes
Very cool! Is that 3" or smaller?