Yes omnibus nano.
And I had a problem calibrating, too, but assumed that was universal at the time, and not related to the omnibus nano.
I had to enable the old ‘live calibration’ mode in mission planner. You hold down control or shift or something, when you click the “compass” menu item in mission planner. (Sry I don’t remember which modifier key it was, but try shift, ctrl, alt, etc). Then MP will show the old live calibration w/ the crosshairs. It ran successfully. Then after it ran, I was able to run the ‘onboard calibration’ w/out any trouble.
And, you do want to run the onboard calibration… It does more than the old live calibration.
-there are a couple posts about it in this thread from Sep14th if you want to read a little more about it…
i just did put gecko 3" together - with armattan motors, no lipo, mateksys gps, no lidar - 176g. nit heaviest, not lightest, will try to fly it in 30 min or so as lipo will charge.
the unexpected surprise was - the nano board refused to invert uart6 by using commands in the hwdef and it looks like those commands there for SBUS inversion on the uart6 were grandfathered from other controller. so, it is blind and deaf - no telemetry and no dataflash logs, so, for now unusable for me. tridge says he may do a softserial driver some time soon and that may enable yaapu lua script to work - after that it will be better.
i get no one worked on the dataflash support for nano yet? what was the challenge there?
ps. also i will look later on what is the deal with buzzer - as model is also mute - which is not fun at all. the default buzzer pin is on the timer that cannot be used, so, it needs to move to some other pin.
just did a first flight - it flew, but was very wobbly on all 4 corners… which is a bit odd as i used same params from the owl - and owl had params from rooster, which worked pretty much almost perfectly - but, not here. it will now have to wait a bit as i do not want to fly it blind, will see if we will get softserial any time soon so i could see telemetry on the taranis at least.
Hi Paul,
Did you try the mission planner ‘live calibration’ and did that let you calibrate the compass? I’m curious if that issue is still here, or if you really had a bad magentometer.
I haven’t changed my firmware since September, but everything is working… I used the layout from this image:
I don’t know what KV motors you’re using, but weaker motors will definitely need higher PID’s, so maybe you need to increase your PID’s? I’ve found that wobbly often means the PID’s are too low.
Also want to mention…
I don’t have a buzzer on this one (But it would be nice to have)
And no, I don’t think anyone has done dataflash yet, for any FC that I’m aware of. I think most of the small boards have the same 16 meg flash, so it would be helpful to have support for it.
What are you running? 3.6 or master? And are you using the official release, or making your own hwdef and compiling yourself?
actually after i swapped out mateksys unit i was able to calibrate it as usual, with no issues at all. other matek was just faulty - i connected it to the kakute f7 board i took off from owl - and it also did not produce any proper values there - so it was bad dead compass. but, other unit did calibrate with no issues at all.
i am on the latest dev master as usual, so , something may have been done there about i2c bus. it is possible.
thx for the diagram.
i altered hwdef to turn S/A pin into a UART2 TX - hope in the future it will be a softserial. the bummer was the UART6 - i was hoping to use it for the r-xsr telemetry feed, but it refuse to invert. so i will wait until softserial feature, do not want to use any hardware external inverter boards on it.
gps sits on the uart1 now and works fine. uart6 is vacant. i can put esp8266 on there, but, will see.
i did not solder mini split yet, still deciding if i want it there. may be not, to reduce weight. r-xsr is hidden in front under the camera cord, VTX is on the top lid that is removed now.
gotta say - it is really hard to deal with this model without dataflash logs.
If I understand it correctly, the board only has 5 uarts… (I know one is labeled 6, but there are only 5 available).
So, GPS, Telem, Compass, RC, and one extra, which I’d want to use for ESC telemetry.
(I don’t know if RC uses a uart, though, so you probably know more about this than me)
That’s a nice frame. I need to try one of the double stack frames sometime.
And yes, no dataflash is a serious issue. If I didn’t have past experience w/ relatively small copters, I would not have been able to get this to work! But from experience, I basically knew if it’s doing something wrong, I knew which way to adjust the PID’s.
if you decide to try armattans - i would recommend 6" chameleon LR ti.
i have 7" chameleon, 6" rooster, and ordered 3" gecko and 4" gecko. 3" gecko i posted above, 4" did not arrive yet.
i have a feel the 4" gecko wil be a sweet spot for 1407 motors, either brotherhobby or those armattans ones. armattans are WAY less notchy than brotherhobby and probably are better vibrations wise.
rooster frame is nice but less convinient than flat base chameleon. 7" long range chameleon on 1500mah and 7" props had so much pull - i had to alter min threshold for motor rotation for it to be able to descent. and i think 6" model, specifically on the luminier 6" gate brakers props is the best option.
but there is also a Ti model, not LR - not sure what may be the diff. i think LR model has space for 2 30mm stacks which is very nice to have, and a regular Ti may have shorter body, not sure.
they are also in stock here, ships faster from there as well. https://www.heli-nation.com/multirotor-27/armattan-1
Paul,
Does the antistatic bag give you better shielding than a piece of copper foil? Or are you using it simply because that’s what you have?
I still have an issue where if all my gear (camera and VTX) are powered on, I don’t get a GPS lock. As soon as I turn them off I get a bunch of satellites. Then I can turn everything back on and all the satellites stay and everything works fine. Everything on my copter is covered in foil, but I’ve not tried an antistatic bag.
i have only copper tape on the rooster and on chameleon i have both bag and tape. chameleon has better gps reception than a rooster. but, i have to admit - i did not do a proper scientific test of what works better. on rooster i used all shielded wires, so i hoped that was supposed to deal with all issues, but, effect was, well, quite partial, if any at all, unfortunately. so the jury is still out there of how to deal with gps. i would try to use bag in your situation and move gps away, as i stated, even if it will disturb center of gravity. difficult to say what owuld work best, it is always a struggle to find a spot with minimal interference.
gecko i did not test yet. so not sure how well will that work - with bag and so close to split mini. i will probably get back to it after thanksgiving ordeal is over, on monday or later.
Thanks,
I’ll keep trying things…
Now I just have to decide… I’m going on vacation in a couple weeks and am trying to decide if I bring my dumb betaflight copter, or my arducopter…
Betaflight is easy and always works. But it’s manual flying and no tracking so I could get lost in an unfamiliar area.
Or Arducopter. I’d have a GPS track to know my home position. I could do auto missions if I want. But it’s a lot more effort to use and a lot more potential things to go wrong.
i personally cannot fly betaflight and relax - i am too used to position hold and alt hold modes.
plus, where i fly i have to be able to get goggles off if needed and pause - good luck doing it with betaflight.
arducopter with yaapu script working is the way to fly. this way you see it all, with goggles or without.
it was a bit of a disappointment - i was hoping DJI will do black friday discounts on the new Mavic 2 Pro, but it did not happen. i do not care much about it, but, for vacations per se it would be a nice thing to take with you. but, for $1500 - no way.
I spent the past year flying betaflight every day, multiple times (usually twice) a day. And, I’m pretty good w/ manual flying now!
But you’re right, the ability to switch to loiter and pause, or flip an RTL switch if I lose video or something are big benefits. Maybe I need fly my arducopter a bit more over the next couple weeks to gain some more confidence w/ it.
I’ve also got to rebuild it :(. There are just a bit too much props in the video for me on the frame I’m using now… I’ve got a spare komori frame, which is what my betaflight copter is on, and it’s great…
Yeah, no DJI for me. I’d probably never find safe airspace to take off in… I’ll be in national parks, and near military bases, etc… DJI won’t let you arm there!
there is always an option to get it, rip it apart or re-flash its brain… but, it is too much effort for me these days.
plus, i actually do not fly those models a lot at all, i find it relaxing to make them and mess with them. my kids fly them from time to time, more than i do.
i have some hopes for the owl frame - it would be something we could take with us to trips, if it will work out. a flat frame with no protruding parts would work well.
I did not realize until your remark here that these F4/F7 boards do not have a SD card for recording the logs. isn’t there a model of such board with a SD card ?
 - which is not fun at all. the default buzzer pin is on the timer that cannot be used, so, it needs to move to some other pin.
- which is not fun at all. the default buzzer pin is on the timer that cannot be used, so, it needs to move to some other pin.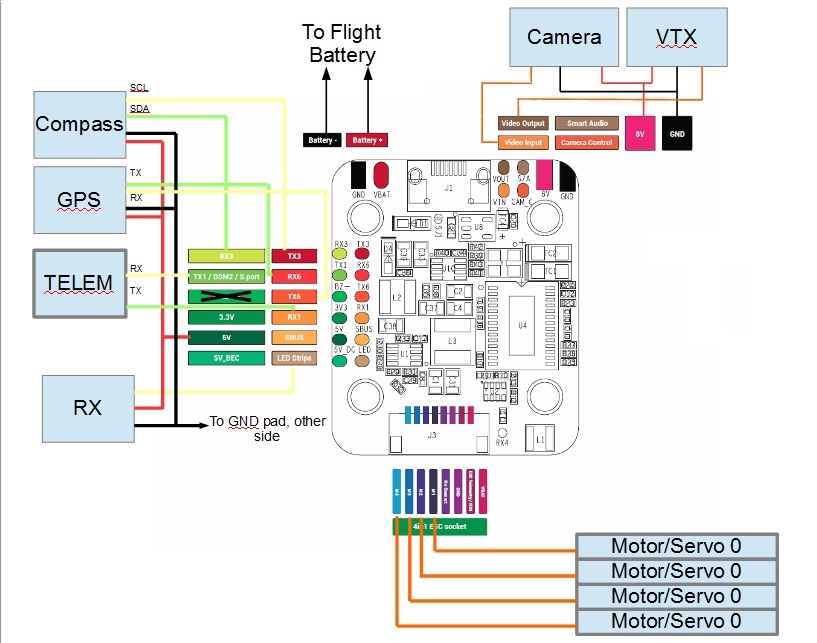

 and i think 6" model, specifically on the luminier 6" gate brakers props is the best option.
and i think 6" model, specifically on the luminier 6" gate brakers props is the best option.