I’d recommend their 'beefcake" frame. Thick carbon. Good layout to keep the camera forward of the props. Has room for 2 short stacks. He’s using better carbon on the newer production, too. (I’m sure your owl frame is old production… he’s been out of stock on those for a while). I want to try their lighter frame that is similar to the beefcake, the ‘skydiver’, but they’re out of stock.
Otherwise, I am super happy w/ the komori frame… although it’s a light 2mm carbon one, too.
The ascent x 3" is at least 3mm carbon.
FYI, Komori has a little bit of the props visiable in the video, but not much. The ascent3" has more… (like, 4x3 is prop free, but the rest of the wide 16x9 has props in it, if that makes sense). I keep my camera almost flat, though… If you angle your camera, it the props might drop below the picture.
Flex warranties some of his frames… all the new ones. Not sure about the owl, but you might want to check their website.
Oh shoot, as soon as I hit reply, I remembered you need 30x30 mounting… I don’t know for sure which frames support that.
Yes, it does have that. A mission file can be stored. Dataflash logs would be great. I have come to rely on them heavily for flight tuning, it’s a much longer trial and error process w/o them. Live tuning helps.
I ordered both another owl and gecko. I think owl is the only one that has protected 3" props and 30.5 stack mounts. Will see. So far i did not really like how owl came out. Too heavy and too many vibrations.
Yet for indoors model props need to be isolated.
I think may be i can superglue old owl to new owl carbon. But it will get very heavy this way
i did put owl back together, in a form of an FPV flying brick. as heliderect guy refused any form of a warranty on a frame - i superglued old dmaged frame to a new frame i bought and got 2 4mm owl plates. new owl also came with aluminum stands - so, now it is indeed an indestructible beater with protected props. perfect gift for my daughter and safe. fact that it does not fly fast is not important. models total weight with no lipo is now 310g. crazy heavy for 3" model but those 1407 motors manage to fly even with a 200g 1500mah battery - only lasted 4min drawing 11A to lioter, but, it flew, and, thanks to beefy frame vibrations went all the way down from what i posted above - 40-50 area all the way down to 8.
so all in all i am quite happy. works now with yaapu7 script - so i removed esp8266 from it. still have a lidar and gps, it all worked out ok. now i wait for 850mah lipo to come to see how it will fly with 100g less to carry.
i later decided to split upper plate in half keeping it at the 2mm thickness. it is just too heavy. good idea of an a frame, but, it is not working well in the 3" prop format. it probably would be very good in a 4" format with a 16xx motor instead of 14xx motor… still, as a toy for a child who like to crash stuff and fly a bit erratically - it works.
It is a good design but lower motor plate should be 3mm thick minimum. 4mm carbon i got now feels good. 2mm was lighter but too flex.
i just flew it with 850mah battery, with it the total weight of new owl is 380g and flight time is just 4min of a calm loiter. not ideal at all. if i take off upper plate it improves quite a bit - but - kinda defeats the purpose of such design, to have protected props. kinda pity to take it all apart again now, not sure, i will need to think about it, i like how it all came together, but, in this 3" format it is quite challenging.
double glued 4mm lower plate now i think is about 50g, upper single 2mm plate is 22g but with all the aluminum posts and bolts it gets close to 60. may be i should have used 4100kv motors instead of 3600kv, but i do not think it would improve flight time, most likely quite opposite.
I agree that if your AUW is close to 400g , it is not compatible (too heavy) for a 3" class. Nowadays, with classic 3" frames such as IHF3, or beefcake, or Komori, most 3" racers remain under 200gr battery included (lightest ones with battery are around 120g, 87g without battery and full HD camera installed). Obviously the OWL frame is not to be considered a racer frame but rather a “truck” drive for slow cruising around the house and is adapted for kids (thay can bang it against the walls).
That is the exact point i wanted to make it, for my 8yr old daughter to learn to fly it. Just thinking now what to do to get flight time at least 7-8min from 4min. I probably take off camera for now. Really wanted it to be an fpv but, it is not critical. It is just a heavy frame. But, a safe frame and, now, pretty much unbreakable, a big plus, as when she flies my rooster i have to swap props after almost every other flight.
I still not sure how it can be under 200g with battery. 850mah is 100g. Frame is 40g.
1407 motors plus wires plus 4in1 esc is 90-100g. Plus FC, plus camera plus VTX… Unless it is not 14xx motors used, perhaps, and a 3s lipo? May be…
Yeah, as I said earlier in the thread, my copter posted above (1st post) is about 95 grams w/out battery. But that does include everything else… HD video, antennas, gps, etc…
You’ve got to make the weight your primary design concern…
Paul, I’d suggest switching to a VTX that uses ufl antenna connectors. Shorten your excess wire length. (I see some wire kind of bundled up in your stack) I’m not sure what else though… Maybe take off the rangefinder. Use smaller gauge battery wires.
But otherwise, you’re right, 14xx are heavy… unless they’re the 1402’s on 2s, which are awesome!. Motors are pretty cheap at this size… You might want to think about switching to some smaller higher kv motors… although batteries aren’t exactly cheap, and you might not have 2s… (I have modified 1s and 3s to 2s, so that’s an option, too).
I’m not lacking performance at 2s… I can go 100mph for 4-5 minutes, or hover for about 11-12 minutes… Normal flights are 6-7 minutes.
-also, 2 blade props are lighter and more efficient, so a win-win.
Hi, you probably meant 1102 motors? it is possible, but, not sure. i really want to figure out how to make this specific heavy owl frame work. which may not be possible, but, will see.
Hi, everyone!
I did my MicroArduCopter 3" props using Pixracer R14 FC, EMax RS1306 4500kv motors, GF3025 propellers, mRo uGPS+Compass, HAKRC 15A 4x1 ESC, custom CF frame, custom 2S Sony 18650 3A VTC6 battery and I got 21 minutes of flight. BUT… I had issues in calibrating compasses, so, I had to disable the internal compasses using the new parameter COMPASS_TYPEMASK and calibration is okay now using only the external compass (this is a new tip to avoid “error compass variance”! :)). My problem now is when I fly in stabilize mode. It does not stay still when flying in stabilize mode even inside a closed environment without wind, and the most strange thing is that it seems to stay flying inside a imaginary polygon of ~2m “radius”. Can PID settings be responsible for this? If not, do you know another possible cause, excluding PID, mag and accelerometer settings? I’m flying in stabilize, so, GPS and compass are not being used…
I’m posting here because my assembly is very close to this.
Thanks in advance for any tip!
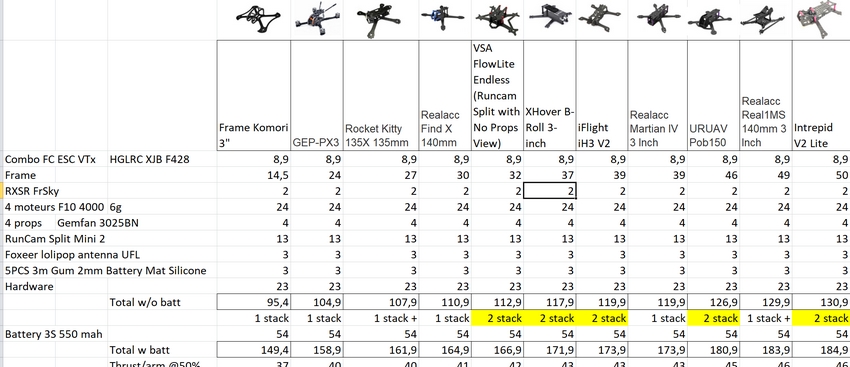
Here is an excel table calculating the weight of various 3" frames that are on the market able to carry one or even two stacks (allowing you to install the runcam split for both FPV and onboard HD recording)
It shows how you can get a full FPV+HD build at under 100 grams:
total of a 24g for 4 motors would make quite a difference, indeed.
i am not really into a type of a small frames like komori, but, it makes certain sense. these 1407 3600kv BH motors are just too much for a 3" model, they would be better on a 4" one.
that owl frame, if i split it again keeping 2mm lower plate will be still close to 55-60g or so. and will be flimsy and vibrating, again. if kept as is - those 2 lower plates give it good stiff 4mm platform, but, adds too much weight. dilemma.
well, heck with it, i will make 2 more armattans as i want to compare 3" against 4" geckos, and it will use 1407 motors, and into the owl i can put those RTF motors on 3s power. will see how it will work out, or not.
Paul,
There are 1402 motors now… Brotherhobby makes some. Good power and efficiency, and not too heavy. But, they’re for 2s. (Ppl run them on 3s, but I doubt they’re efficient at that voltage). Those 1105’s should be great on 3s.
Maroquio,
21 minutes is great!! I’ve been procrastinating about trying 18650’s, but I really need to now… I have them… Just need to solder a few wires to them. They will cause more magnetometer interference than a flat battery like a traditional lipo.
Do you have other copters to compare to? Stabilize has never stayed in one spot for me… It’s not an issue flying FPV because my thumbs are always compensating. But if I just take off and hover in my garage w/ my hands off the sticks, it will definitely move around on its own. If your PID’s are too low it might drift around more… I’m not positive about that though. I found on these small copters auto-tune was lowering my PID’s too much, to the point it was difficult to control.
hi, did you use omnibus nano v6 FC on your build? i just finished soldering gecko frame with it, just placed gps in there, it is fine, compass is connected - but refuses to calibrate - like calibration procedure does not start at all after you press ‘start’. i never had such a stunt from MP before.
any idea of what is the issue here may be? i am a bit confused.
crazy stuff. brand new mateksys gps had a dead compass init! it would identify it fine on I2C bus - QMC5883L found… - etc - but would not produce any values!!! crazy stuff. goes back to amazon, thanks to prime.
 as heliderect guy refused any form of a warranty on a frame - i superglued old dmaged frame to a new frame i bought and got 2 4mm owl plates. new owl also came with aluminum stands - so, now it is indeed an indestructible beater with protected props. perfect gift for my daughter and safe. fact that it does not fly fast is not important.
as heliderect guy refused any form of a warranty on a frame - i superglued old dmaged frame to a new frame i bought and got 2 4mm owl plates. new owl also came with aluminum stands - so, now it is indeed an indestructible beater with protected props. perfect gift for my daughter and safe. fact that it does not fly fast is not important. 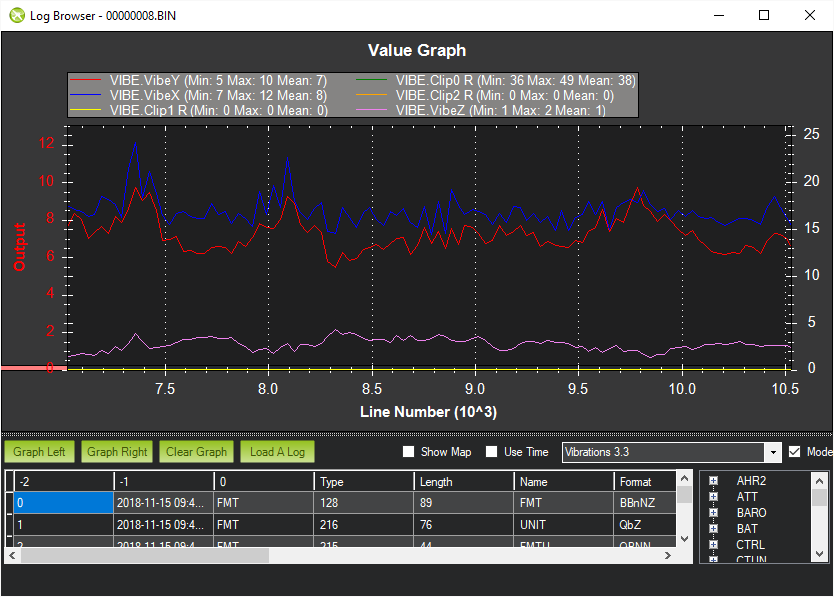
 - it works.
- it works.