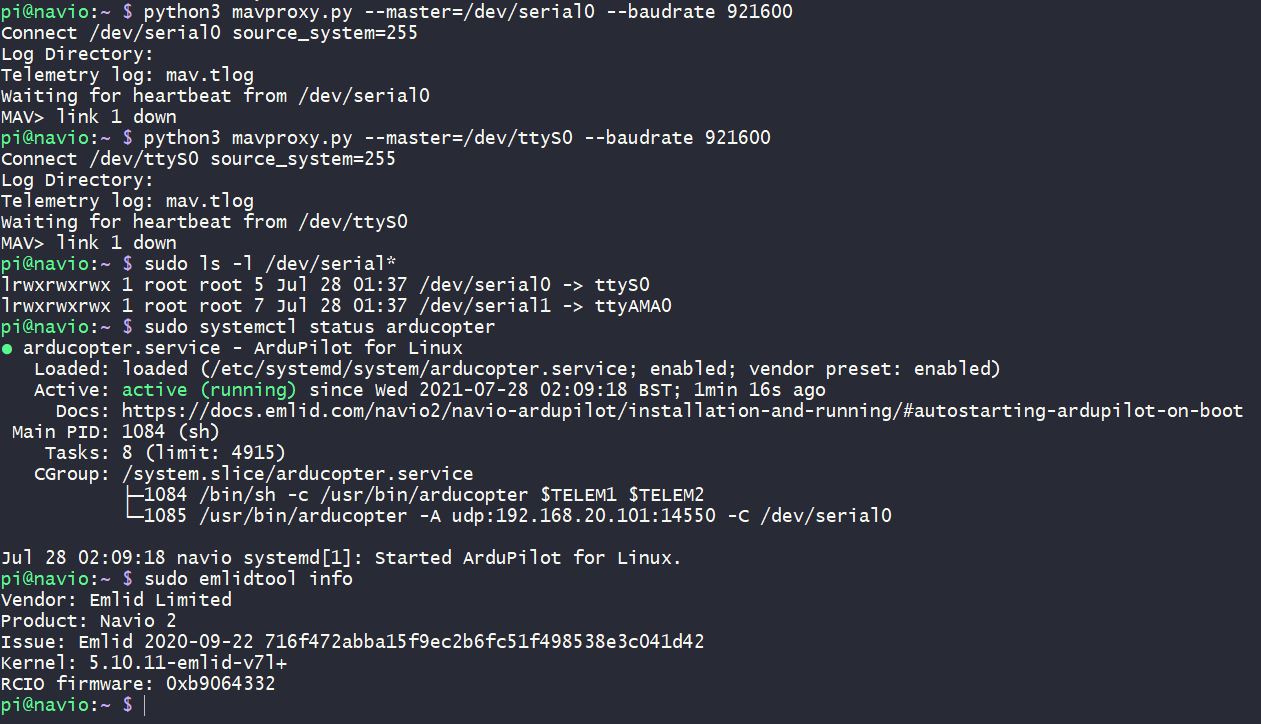
Dear ardupilot community, we are two German computer scientist guys working on a bachelor thesis for programming a drone to fly automatically through a room while measuring it. We found the following tutorial using a raspberry pi, the navio2 hat and the ardupilot software including mavlink. (Integration of ArduPilot and VIO tracking camera (Part 4): non-ROS bridge to MAVLink in Python) Unfortunately we are not able to make the raspberry pi communicate with the navio2 board via the serial0 / ttyS0 connection, although the system is correctly up and running. We always get the error “MAV link1 down” and no connection is established. As you can see from our shell, all components seem to be quite updated and running correctly. Do you have any idea what we can try next to make it working? Any help is very appreciated! Thanks in advance and regards from Germany! Stay healthy.