All-
I am trying to control my Pixhawk via MavProxy on a Raspberry Pi 3 B. I have installed everything successfully, enabled serial port hardware so I can utilize the ttyS0 connection.
Every time I run mavproxy.py, I only receive the following:
Auto-detected serial ports are:
/dev/ttyS0
Connecting to /dev/ttyS0
Connect /dev/ttyS0 source_system=255
Log Directory:
Telemetry log mav.tlog
Waiting for heartbeat from /dev/ttyS0
MAV> link 1 down
First, should I be concerned that nothing follows the “Log Directory”. Secondly, I am not very familiar with all the tools MavProxy has to help troubleshoot this connection. What should I start with? (If I append --startup, I can see data, but it is gibberish ie. question marked boxes appear in console).’
The Pixhawk connected to Raspberry 3 B hardware from TX/RX/GND, 5V(if Raspberry have its own power, not necessary) and the hardware setting can be easily get from website or google.
Pixhawk connect to Raspberry from Mavlink connected. Please ensure your install is right.
I am using the HKPilot32 fc which I understand should be the same as a Pixhawk. It is being powered by a LiPo.
At first I tried installing the apsync image, but was unable to boot the RPi using that - but that’s another issue.
Otherwise I have checked around the various ardupilot discussion forums and failed to find a solution. Some of the tutorials and responders indicate it should be an effortless exercise, yet for many of us it is not.
Hopefully someone with a very good understanding of SBC comms can help!
Apologies if this thread was in regards to the server software. Should have suspected when you started referring to a website… Regardless, still cannot ssh in.
btw, I am new at this so your help is definitely appreciated.
Could you clarify use of the server software vs the apsync image? As I understand, either one is used for FC/companion communication and telemetry downloads? Is it because the former offers communication via the internet?
A flight operation could then involve use of the WiFi link, the SIK radio link for GCS communication and the TX transmitter for flight control? So three comm protocols are simultaneously occurring? Which of the three is used to monitor data downloading? For example, from sensors that I would like to connect to a companion board? I want to fly to WPs, measure a physical parameter, then time/GPS stamp it.
Sorry for all the questions - again the help is very much appreciated.
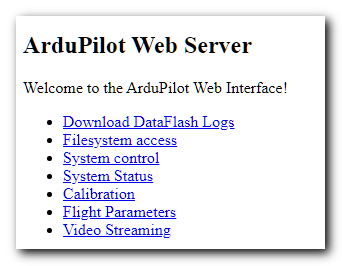
Are you able to confirm if the Pi is getting telemetry? Go to the APWeb interface at http://10.0.1.128 and check if you’re getting telemetry there.
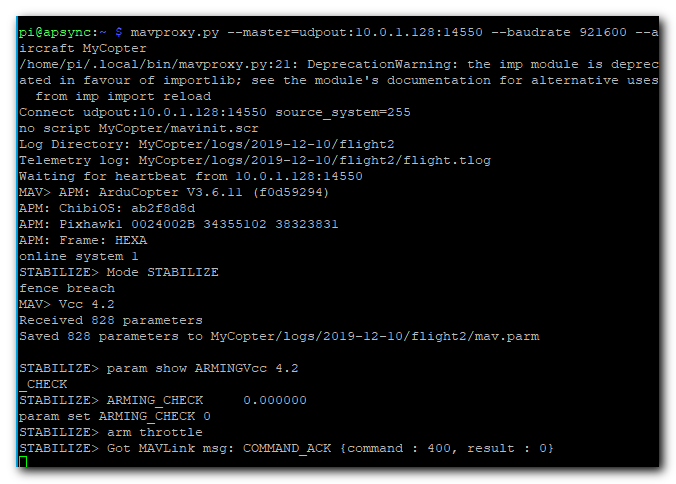
Both pymavlink and mavproxy are already installed on APSync. You can start mavproxy with mavproxy.py --master=udpout:10.0.1.128:14550
Both APSync and Rpanion-server are similar, in that they both offer: Wifi access point, video streaming, telemetry forwarding, web interface. Just different options.
Correct. Note that the Wifi link and SiK radio link are sending exactly the same data - MAVLink telemetry.
Yep, that’s definitely possible. You’d likely need to write the software yourself though, depending on what sort of existing software support there is for the exact sensor you’re using.
Mavproxy provided MAV>, but as before I got “link 1 down”.
Curiously, when I later rebooted, it would constantly crash after the end of the boot sequence. So I reflashed the image and it was ok. But still getting “link 1 down”.
If I tried to reboot the “Flight Board”, nothing happened. Looking at System Status, I’m not seeing data.
I supose I might conclude there is something wrong in the hardwiring between boards, but I have confirmed the continuity of the cable and the proper RPi GPIOs are used.
Not sure what the next step would be other than to try other boards.
This looks great. I sadly have a Pix Cube with Intel Edison carrier board and Intel Edison that does not seem worth pursuing – I got it used but APSync seems like abandonware. When I get a chance I will slap a Pixracer on a RPi3.