Is it possible that APM does not send mavlink data on its own and I would need a minim OSD for instance to get the stream going?
I just checked those settings on a 3DR APM 2.6 and I could get no data.
When I get a chance I will hook a radio up and see if MavLink on that port needs to be initiated, which I vaguely recall was the case with 3.2.1
However I did note that I was getting Flight mode and arming state, just no other data.
Hi Mike,
that would be really helpful. I will try getting data from another APM tonight.
I can’t seem to even get the flight modes :-/
It seems that 3.2.1 on APM must not initiate MavLink on the port until it gets a request to do so.
I hooked up the MavToHOTT data line 'T’ed to the Tx of a radio.
Boot the APM and no HOTT data, but connect with a radio and the HOTT data starts flowing.
I do recall this was an issue with some of the OSD’s until they included an initiate MavLink command on bootup.
I do know there is a firmware update for the MavToHOTT.
Are you using the latest?
I have downloaded it but not yet install it.
Hi Mike,
I have mavlink2hott 1.4.3 installed.
So you mean it could work if I set up, say a minim OSD and hookup the Arduino and the OSD both on the Tx of the telemetry port, while the OSD also is hooked up and sends a request through the Rx of the APM?
Best regards
Kay
@Kay_Hawaii not all OSD’s actually request data.
I know some versions definitely do not request data and rely on the Telem1 being connected to a radio.
This is why they work with only the Tx line connected.
Everybody, thank you all for your help and support,
I am happy to report success.
I had contacted Michel Kosloff, the developer of the mavlink2hott firmware and after some deliberation and a video I sent him, he suggested not using an arduino with onboard USB, as I had, but rather an arduino pro mini.
That worked like a charm!
Best regards
-Kay
Hi
could somebody send me the hex file (the link is broken)
many thanks
AdCam
Thanks mike
When i type the link i have a 404 error
Adcam
Version 1.4.5 update is available.
Some small bugs fixed (eg. voice alarms are now suppressed until armed)
Welcome to download at http://mediamax.pro/MAVLink2HoTT/
Hi thanks for great firmware it works great and for free! zdv770 if you will have same free time maybe you could check why vario voice info from graupner doesn’t work correctly  Voice info about desceding or ascending in earphones is to late and not accurate but that can be a problem with ardurino not with your mavlink to hott telemetry.
Voice info about desceding or ascending in earphones is to late and not accurate but that can be a problem with ardurino not with your mavlink to hott telemetry.
1.4.5 works great for me, but i’m missing some modes, for example FlowHold.
I resigned from voice vario and other things works ok
I’ll be glad to make updates. Could you please tell me what features you need.
Thanks for great work zdv770! If you will have some free time  for me most useful will be voice vario. In current firmware it doesn’t work. It’s to slow or not correct. In my Mikrokopter octocopters when this function is enabled when I am flying higher I hear higher voice in earphones, when I am descending I hear lower voice. When I am at the same altitude there is no voice. It’s extremely useful but I am afraid that this in not possible with mavlink protocol and arducopter, you have to check.
for me most useful will be voice vario. In current firmware it doesn’t work. It’s to slow or not correct. In my Mikrokopter octocopters when this function is enabled when I am flying higher I hear higher voice in earphones, when I am descending I hear lower voice. When I am at the same altitude there is no voice. It’s extremely useful but I am afraid that this in not possible with mavlink protocol and arducopter, you have to check.
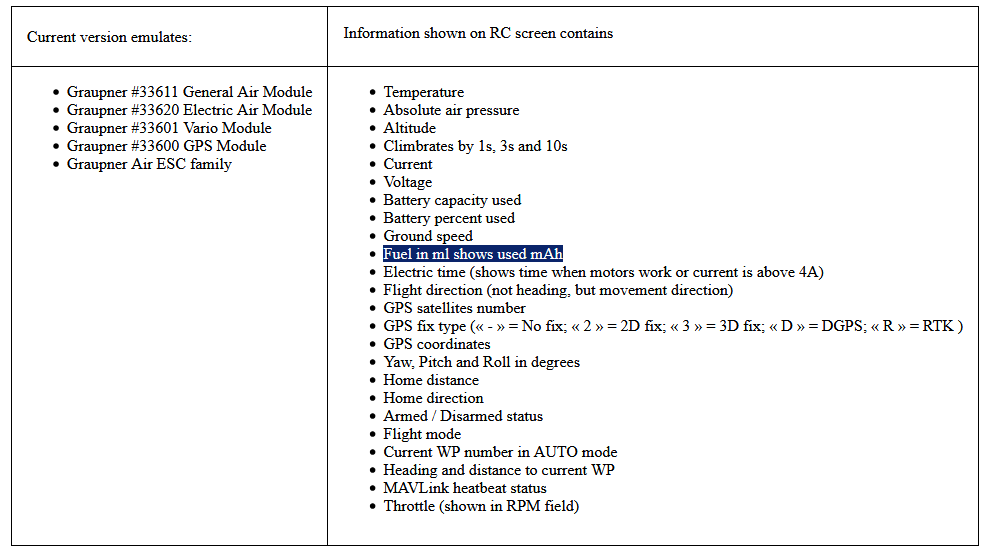
That will be also nice to count how many mAh was used from battery from 0. I have different batteries with different capacity and on the filed it’s hard to change the capacity in my graupner mx20 each time I am changing the batteries. Or maybe if you want to stay with option with capacity with subtraction from full battery maybe you would add an option with some kind of memory for different batteries where I will have fast access to choose different batteries capacity.
I think voice alerts in my garupner mx20 are not correct. Which version of voice files do you use? Could you send the download link from graupner site?
Current version does display mAh used
See http://mediamax.pro/MAVLink2HoTT/
Do you mean disabling battery percent functionality and just display used capacity instead of remaining?
Unfortunately I don’t have MIkroKopter and though I cannot understand you question exactly.
Current functionality of voice altitude messages is as follows: when aircraft crosses altitude boundary of 20, 40, 60, 80, 100, 200, 400, 600, 800 and 1000 meters up or down, voice alarm is triggered.
All voice files are from standard Graupner distro.
Is only VARIO emulation emabled? Try to enable other emulations and tell me.
That’s it… You’re welcome with more questions.
Best regards,
Michel
Update is on the way
MK
1 Like
yes ![]()
Unfortunately I don’t have MIkroKopter and though I cannot understand you question exactly.
In Mikrokopter I don’t have alarm when I will cross altitude but I hear constant high voice when I am ascending and low voice when I am descending.
")
Hello Michel,
great work you did there. I have been using your MAVLink2HoTT for a while with a GR-24 receiver without problems.
I now did a new built up with a GR-12L and telemetry does not work 
I’m using an Arduino Pro Mini 16MHz board. Works on a GR-24 and GR-18, but not on the GR-12L. Other sensors work with the GR-12L.
I’m quite familiar with the HoTT Telemetry Protocol and also did a Text-Menu implementation for openXsensors (available at https://github.com/sternflyer/openXsensor-extended-HoTT). I checked the response of MAVLink2HoTT in Text- as well as in Binary Mode in a serial terminal. The Arduino responses with the correct data, but I believe the timing is incorrect. I know that especially the GR-12L is quite “picky” when it comes to timing.
Is there a possibility you can check the timing to ensure it meets the HoTT Protocol? It should be 5ms before sending data after a request and 2ms between each byte.
I’m quite happy to support you if you need help looking at timing in your code.
Thanks!
Kind regards
Niko