Trying to setup a new build. I’m stepping through the process and after my flight to learn hover I keep getting around 0.18 for MOT_THST_HOVER. The parameter says that is too low and also the PSC_ACCZ_I and PSC_ACCZ_P numbers using that would also be too low. Initially it seems to hover maybe 45% throttle. Do I have an issue here?
I am also getting MAG anomalies no matter how often I calibrate the compass. It seems to drift between flights, though sometimes seems to realign itself. Otherwise initial flights were very smooth.
I did the initial parameter setup for my configuration and have been using those settings.
Additionally my ESC is supposed to support DSHOT600 but when selected in configuration all the motors just randomly beep and twitch. Side question: any issue with loading different ESC firmware (i.e. Bluejay?)
I appreciate any help. I’m relatively new to quads, brand new to Ardupilot, but have been flying fixed wing for years (which apparently doesn’t carry over much!).
That link has an access requirement. But to answer your 1st questions ignore the warning in Mission Planner for parameters values out of range. These ranges are not up to date with all parameters. There is nothing unusual about a MOT_THST_HOVER value of .18
Read thru the 7" LR build blog for some helpful tips: 7" LR
Don’t copy the parameter file though it’s on 6S power.
Sorry about that, I fixed the access requirement, forgot I reuploaded and didn’t reset permissions, it should be good now.
Okay thank you, that is good to know on the ranges, that was the main thing from keeping me from proceeding with tuning steps (that and the horrible wind we’ve had for over a month straight).
I will review that build log. If anything stands out from the blackbox log I can pursue that as well.
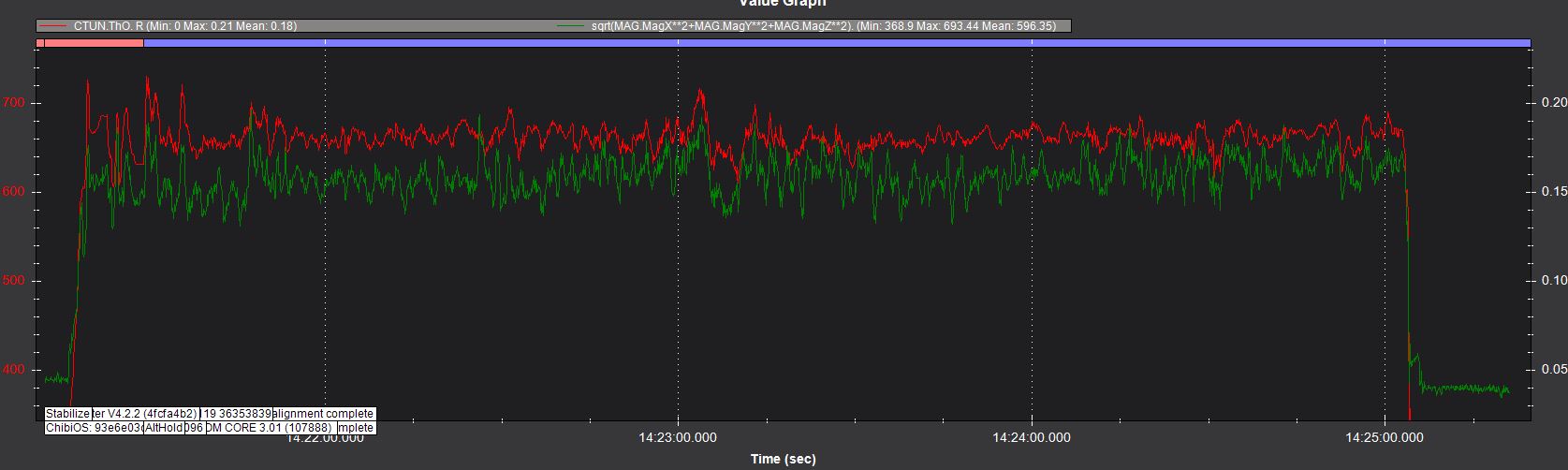
It looks like you are making good initial progress. You can expect mag problems with the Li-ion battery on a smaller size craft. There isn’t much throttle action to see in that log but it seems to be sensitive to motor current also:
Run Magfit to calibrate the compass and generate the data for Motor compensation. Using MAVExplorer is the easiest way to do this, instructions at the bottom of this Wiki: Magfit
Where is the gps/compass module located? In the front over the camera works for me on a 7”.
Oh that is good to hear. On that last flight I was really focusing on just hovering to make sure the hover learn was accurate. Now that I know I can set those params I’ll do a proper test flight.
I’m still learning to understand the logs; how can you tell it is sensitive to current from that graph? And also what would that mean?
I will run through the Magfit for sure. I’m still figuring out the best way since my only PC that can run MP is in my basement and figure it may not be the best place to do an indepth calibration?
Unfortunately the gps/compass module is directly off the back. I know it is poor placement. I intend on making a pedestal to sit centered and well above the battery but waiting on my friend to get filament. I intend on having the front and rear cameras on servos so they can be tilted so didn’t want to mount up front but I since it will be awhile I can remount it there.
Because the Mag signal is tracking the throttle output. But to know for sure you need more throttle action.
Magfit uses Flight Data to produce the mag offsets and motor compensation coefficients. Read the Wiki you will understand. You don’t use Mission Planner.
That location will give you nothing but trouble. You can try to put it on a tall mast it might improve it enough. You could possibly locate a seperate compass board in the front. They are tiny (and cheap). If you read the build log you will see that’s what Andy did on his 7". I was able to mount the GPS/module on the front on my 7"
Ahh sorry I was confused and was thinking the motor current was something else, that makes total sense now seeing the mag track it.
I just read that about the Magfit, that will work well then.
I will definitely try mounting on the front for now. I do have some barometer/compass modules but as I recall the barometer is same as onboard so I would somehow have to disconnect just barometer on external module?
This is really great, I appreciate the help thus far!
First flash the Bdshot version of firmware for that board and configure it. No reason not to use that. And Dshot600 should be no issue. I have 2 of those FC’s with 2 different 4in1’s and that’s what I configure for.
Ah, that’s a BLHeli_S ESC. I would not have bought that one. You will need some firmware on the ESC to attempt to get that working. I’m not sure if Bluejay is supported. Long thread about it: Bluejay
So I had verified it was most recent version of the BLHeli_S before. When I went in to check the params I noticed I had DSHOT600 selected but did not select the actual DSHOT protocol (BLHeli_S/option 2). Not sure how it worked on DSHOT300 but set that and it works fine now! I guess I thought it would automatically select that if it needed it. I do wish I knew better at the time to get the F50 Pro version that has BLHeli_32 but I guess I will know for next time.
I will check out the Bluejay thread. I have that on all my other quads and seems pretty nice.
I just took out for another test flight with some more throttle input and flying both ALTHLD and Stabilize. I have the gps/compass now mounted on the front. Unfortunately I forgot to calibrate beforehand but it was just a quick test to make sure all was working okay still.
Here is the log for that if you wouldn’t mind having a look? I know the mag will still be off but maybe can see if anything else major stands out that I should be looking at right now?
Not bad considering it’s on default PID’s. You will want to configure the dynamic notch filter before advancing with tuning. Set INS_LOG_BAT_MASK to 1 and make a simple hover flight in AltHold for a minute or so for log review.
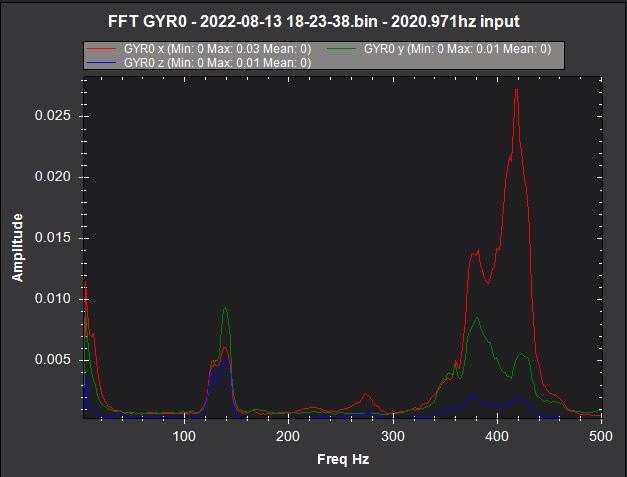
Trying to learn this, using the FFT analyzer for ACC0 looks like I have a major peak at ~418hz at 1.7 amplitutde, secondary at 378hz and 1.3 amplitude, and then a couple of smaller at 140hz and 128hz 0.7 and 0.5 amp respectively. Am I reading that all correctly?
Ah sorry got mixed up with the other filter instructions. It looks like GYR0 is showing a spike at 418hz with a following minor at 382hz at 0.027amp, that spike with 323-463hz. Then another at about 140hz at just below 0.01. I’m having trouble understanding the next steps here.
What software is that? Mine shows that peak here as closer to the other and more rounded so I just felt like it was included in the 140 peak. I guess you would want to filter based on the entire (i.e. start of) waveform though?