Hi, I’m using a motion capture system and mavros to send position to arducopter.
During loiter tuning (Indoor position controller tuning) I’ve seen a strange behaviour, when the copter is turned on yaw it flies in the “opposite direction” and then comes back in position, can this be related to some kind of sensor offset?

@rmackay9 said on a previous video:
I think the yaw estimate is off. I suspect you can see this if you just walk the vehicle around. I think you’ll probably find that if you hold the vehicle’s heading steady and walk forward in the room that the vehicle’s position on the ground station map doesn’t move forward but instead moves off to the side…
But I double checked that, the orientation passed by the system is ok. I’ve even moved the markers to have a better asymmetric body for the cameras to get orientation.
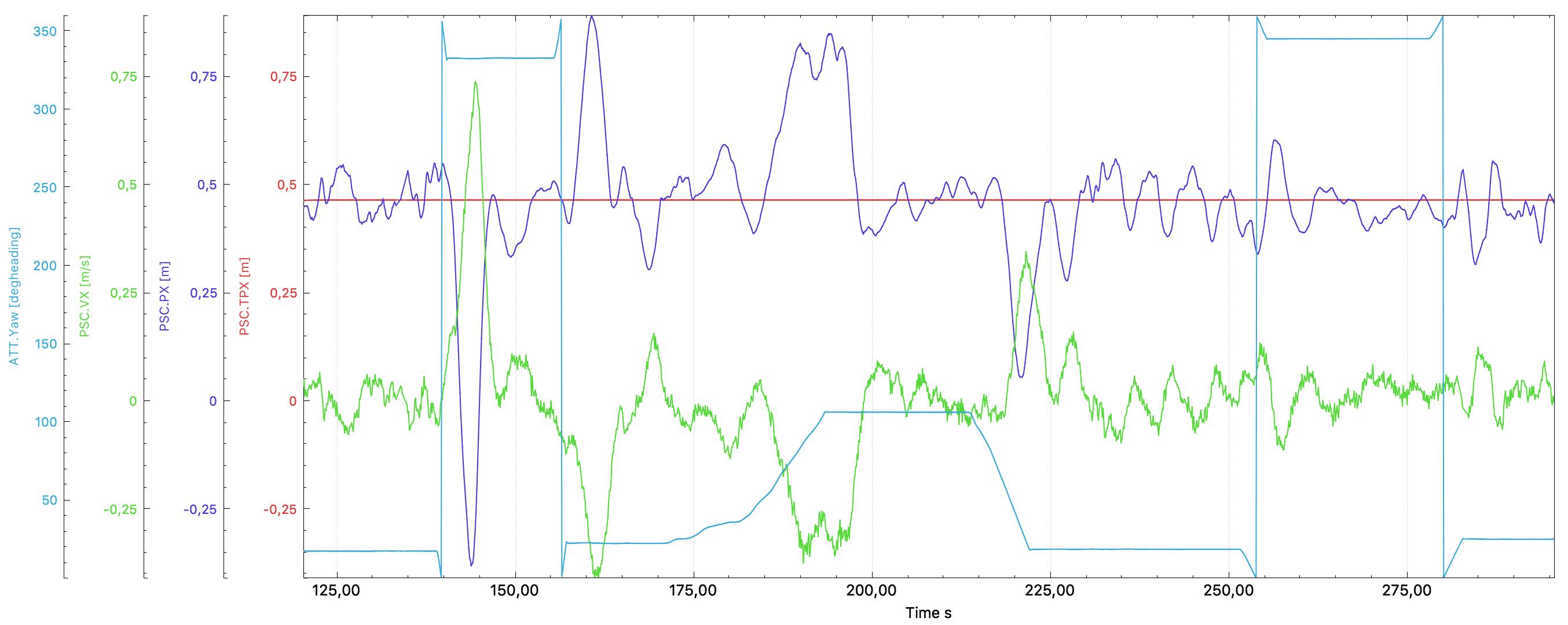
Then I recorded this video, the only input is a few degree counterclockwise rotation and then the copter comes back in place. This is repeated multiple times.
As you can see, this weird “involontary movement” is corrected by position controller which almost correctly comes back in place. This movement is always related to the body frame of the copter. Maybe it has something to do with some inconsistency with the frame of the velocities?

Heres the log file of the video
In another test with a slow and costant yaw rotation input the copter seems to follow a circle path around a point a few meters ahead of its nose.
It happens also if the copter is turned clockwise, with a drift in the opposite direction.
The PIDs are fine tuned indoor following @Leonardthall suggestions, the copter flies very well in STABILIZE.
The firmware is the ardupilot master of a couple months ago on Chibios, next time I’ll test with 3.6rc10
Maybe there are some parameters to check or so, have you any insight on this?
Thank you all for your great work!