guglie
September 18, 2018, 4:54pm
7
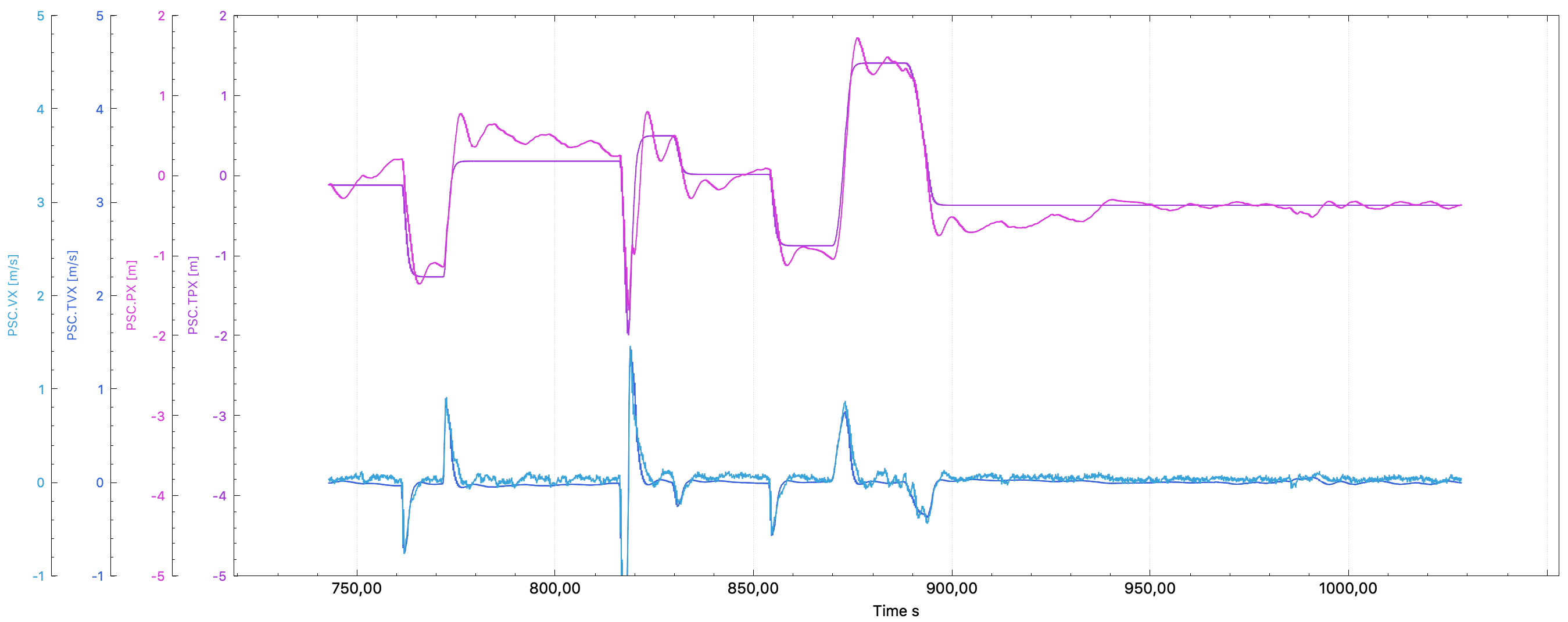
I’ve done multiple tests, but never got rid of overshoot and oscillations. Only reducing PSC_POS_XY_P led to fewer oscillations, but obviously making the copter less albe to reach its PSC target.
Here’s PX and VX with a very low PSC_POS_XY_P = 0.1
I’ll reset PSC and try with the NEW LOITER parameters as stated in this thread by @Leonardthall
I would suggest tuning loiter by recording the lean angle at the maximum speed you want loiter to travel.
Set LOIT_ANG_MAX and LOIT_SPEED to those two values.
Then set LOIT_BRK_ACCEL to define how much extra breaking you want to see when you let go of the sticks.
And the LOIT_BRK_DELAY to define how long after you let the sticks go the extra breaking kicks in. This is there so you can fly around slowly without the aircraft constantly trying to break.
If you find that the breaking increases t…
I’ll report here if that affects the loiter performance, i hope!
For the yaw problem I’ve opened another dedicated thread with another specific video and log