We did the update to 4.1.5 but problem still exists albeit less frequently. So far we have done a total of 20 test flights with 3 drones and the problem appeared in 5 cases.
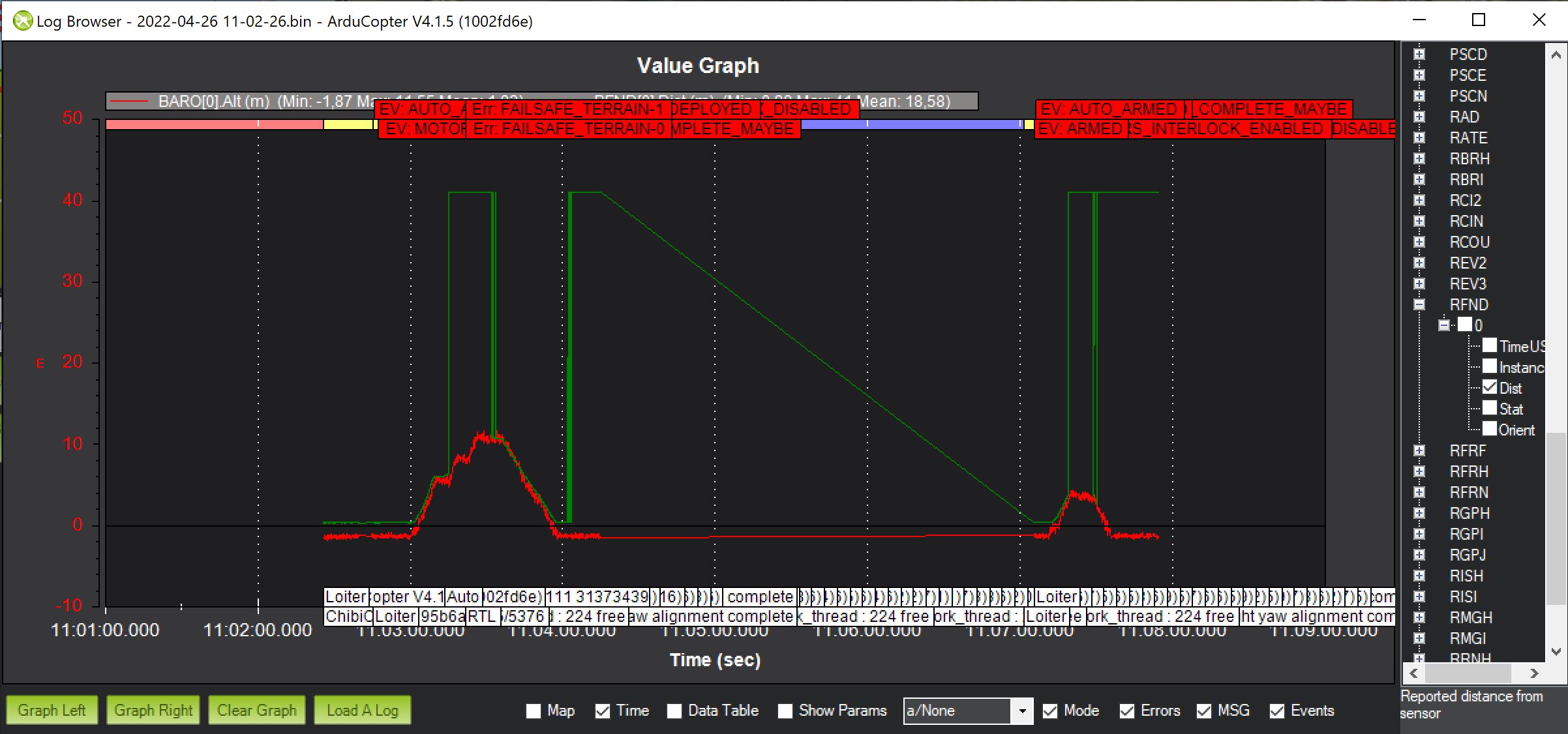
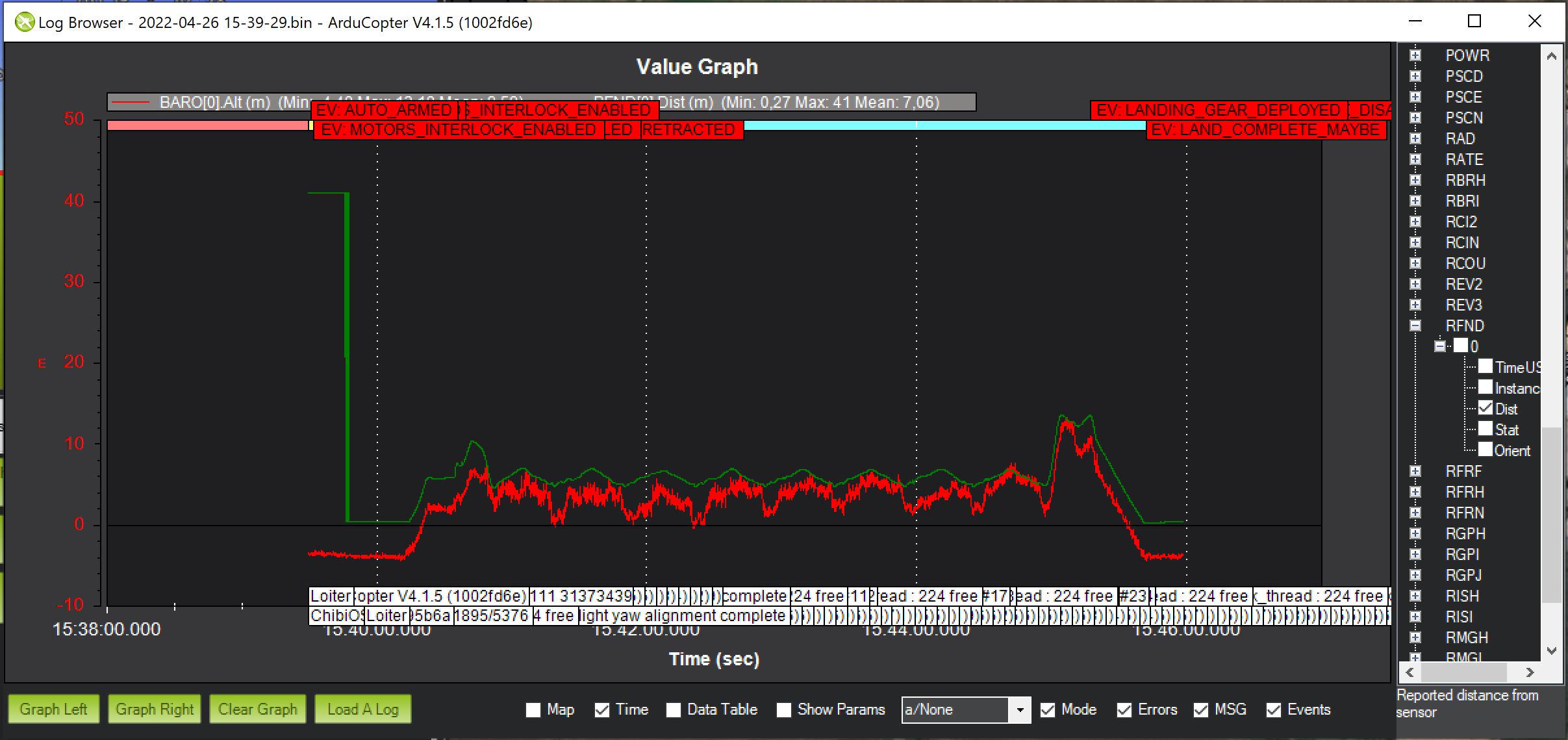
I copy here screen shots of the problematic flights (baro vs LIDAR height). Happy to share .bin files too if that helps - please let me know if you need them.
Also, found that other people have similar experience with Cube Orange / LIDAR, would be appreciated if developers would look into this problem deeper. here are a few of other peoples notes: