Have you had any failures where you are full throttle and the servo relaxes and goes back to neutral? I am using these 65kg servos on amazon (https://www.amazon.com/ZOSKAY-Waterproof-Digital-Compatible-SAVOX-0236/dp/B07K48FQ1N). When I move my throttle stick all the way forward (or steering stick) it holds it in the full throttle position for about 10 seconds and then it seems to “relax” or go back to neutral. If you wiggle the stick a little bit the servo seems to re-engage. Did you run into this issue at all? I’ve checked the power and it looks good to the servo at 7.5v.
I am not sure if there is an ardupilot setting that I am missing or if the servo isn’t strong enough. I measured the strength it takes to move the throttle bar (not sure the correct name) on the mower and it is about 13kg. The servo seems to move the throttle bar fine back and forth, its just when I try to hold at full throttle it “relaxes” back to neutral or close to neutral.
Those are cheap, unreliable servos. I highly doubt the servo is being commanded that way, but rather it’s probably failing internally.
Look into HiTec or AGFRC servos for better reliability.
Please stop posting, re-posting, and also private messaging the same question, repeatedly.
That looks great, Steve! Looking forward to hearing how the next phases go for you. You are over a big hurdle now!
Almost sounds like the servo is going to sleep as they will do if the PWM signal stops for a period of time. I don’t think the flight controller ever stops the PWM signal, so it is likely a problem with the servo as @Yuri_Rage stated.
Those are awfully inexpensive servos. If they happened to work reliably over time (which I doubt), I want to buy a boat load of them! ![]()
Well I am happy to report my mower is working very well now. I think that GPS card was really hanging me up. My mower was very solid today and it performed better than it ever has. @ktrussell @Yuri_Rage @jason_miller
Here is a link to a video I put on YouTube today: First full automatic mowing job - YouTube




Steve, great to hear and see your mower in action. Looks like the rear discharge deck is working well.
Great job Steve!
Your mower looks very well done and seems to walk through that tall grass without much effort. Congrats!!
Thanks for the words of encouragement. It actually seems to run very well and it looks impressive from a distance, but when you really look at the mowing path it has some tuning issues.
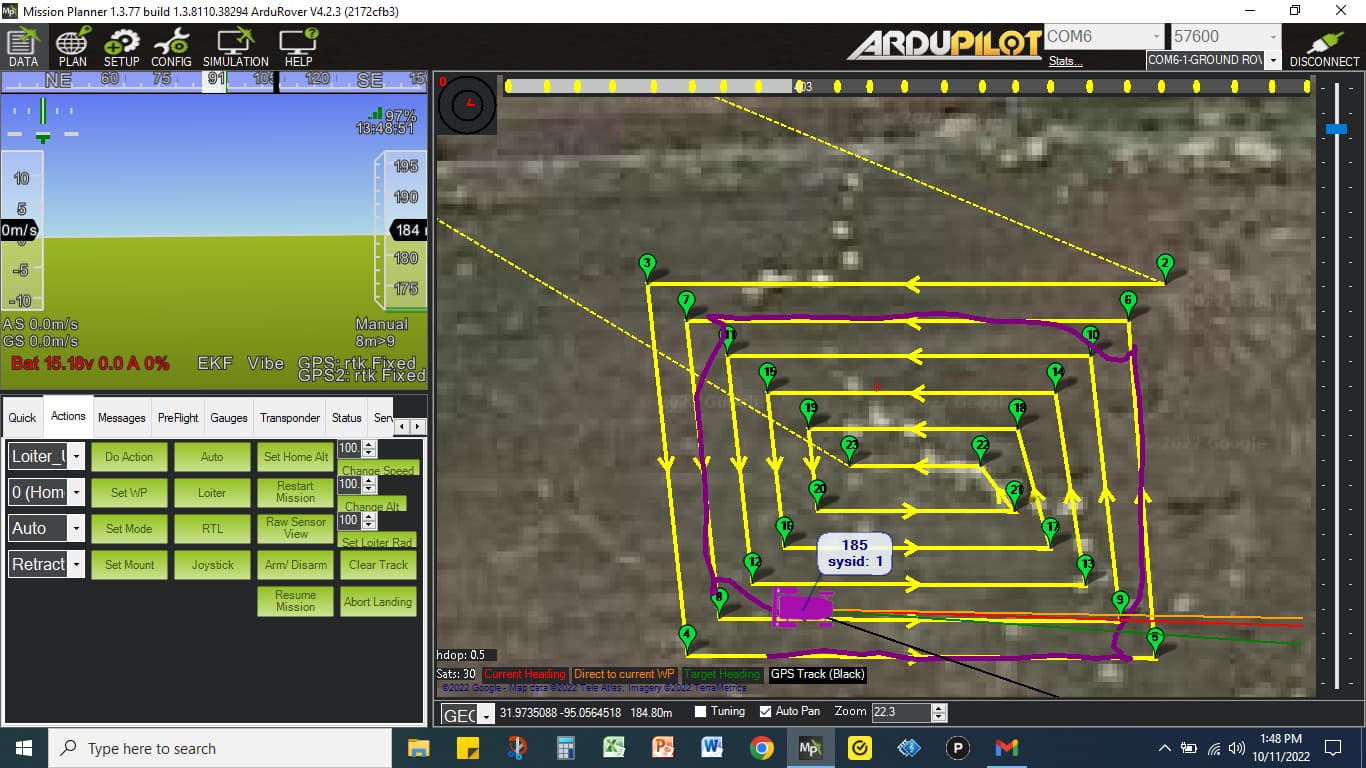
I am sure you guys that have been doing this for a long time have seen about every kind of tuning problem. What do you think is going on here. It’s like it starts going for the next waypoint as soon as it breaks the 1 meter waypoint circle and then it has to correct. Is one meter too small to use for waypoint boundary?
In regards to that mower deck I did have to weld some air handling features under there to make it work out. I could show you pictures if you are interested.
1m is too large. And it appears ATC_STR_ANG_P and/or ATC_STR_RAT_FF are too aggressive.
Hi @SJohnson,
Rover-4.3.0-beta2 is available in case you would like to give that a try. It removes the issue where the vehicle turns too early at the waypoint but the solution is quite a large change because we’ve introduced “S-Curves” for navigation and we don’t have documentation giving tuning advice for this new method yet.
If you do try Rover-4.3.0 with S-Curves it would probably be best to post your results in a new thread over here.
What WP circle size do you use on your mower?
0.2m. But don’t use my numbers as the gold standard. They all have to work together on your machine.
Well, looks like if you drop the waypoint radius to a very small number, it would be pivot much closer to the waypoint and the over-correction would be much less of an issue. Taming that over-correction is another matter that rest with the turning acceleration parameter that escapes me at the moment. (I’m on an iPad tonight…). If you think about it, send me your parameter file and I’ll be happy to take a look!
-Steve-
I have a general question about using the RTK mowers up around trees and other objects that partially obscure the sky view. I have found some difficulty in some of these situations and the mower does sometime alter course a bit. I know the sky view is important for operation, but are there things we can do to help the situation? Do better antennas help and/or do other more expensive GPS systems work better? I am using the ArduSimple RTK2B GPS receiver boards with the simple black puck antennas from ArduSimple.
I have been thinking about this problem for a while, recently there was a pr about adding optical flow to rovers for indoor ceiling tracking. And it occoured to me that optical flow would be ideal for precision navigation in gps denied environments outdoors on rough terrain as wheel odometry wont work if there is any wheel slip.
The optical flow sensor only needs to be around 30cm off the ground but the higher the better.
I have the Ardusimple boards and the simple black puck receivers from them. Are you using metal groundplates on your antennas? I am. My mower maintains RTK fix (on both GPSs) even among the trees on my yard for hours at a time. To handle the occasional RTK drop, I also implemented a failsafe so that when the GPS fix falls below 5 (i.e. not an RTK fix), the mower pauses until the GPS fix recovers its RTK fix. I never mow when the GPS fix is less than 5 because the lower precision fixes have precision measured in meters, rather than cm, and I don’t want my mower to be that far off-course.
Thanks for the information. I do not have my antennas mounted on anything. They are just stuck down on top of the plastic boxes where they are located with really strong double back tape, Does the metal mounting plate need to be aluminum or something steel so the magnet will latch down? I will also be trying to implement the same GPS fix failsafe. That is a good idea. Thanks so much for your help. I did get my mower following the mowing pattern much better by making the WP radius smaller and by making a few tuning changes. I am pretty happy with my mower and it seems like it does what I wanted to achieve (get me off the mower).
I use aluminum. Sparkfun’s are steel. https://www.sparkfun.com/products/17519 I don’t recall reading anything that says it matters what type of metal. I use 6" round which is probably larger than necessary.
An old circular saw blade makes a good ground plane. Likewise, a mini pizza pan could be repurposed as well.