Steel vs Al doesn’t matter. Most large antennas are aluminum. As noted, size matters and the minimum calculated circular disk for GPS freqs I recall being about 4.5" diameter. Bigger doesn’t hurt although there is a point of diminishing returns. Round is common but the actual shape matters little here. I use 8" flat disk out of aluminum on my large rovers.
3 Likes
Congratulations, Steve, on your success!
I finally implemented two round ground plates under both of my GPS antennas and it made a huge improvement! My mower maintains a GPS fix very well now., even in overcast conditions. The installation guides claim you need the ground plane behind the antennas, and believe me they work much better when installed as instructed. Thanks, for pointing this out! I am using 6 inch aluminum disks.

Now this raises the question about ground planes for the other 900Mhz radio antennas. So far the radios have been working well for me, but I never ask them to work over long distances.
4 Likes
Hi everyone! I decided to try and implement ardupilot on a zero-turn by following all of your advice! This channel has been so helpful and I can’t thank you enough. I think I have had some pretty good luck so far. I have everything hooked up and am having some success tuning it but I feel like something just isn’t right. I followed all the rover tuning steps on the ardupilot page. The mower seems like it tracks decently well in the tuning square but has a tiny curve initially when it starts on a new straight line. However when I try and do a “back and forth” mowing pattern this is when it doesn’t track any of the lines very well. I set the spacing of the mow pattern at 3.4 ft as the mower has a 52 in deck. I did plug in a Spark Fun Zed F9P to my computer as a RTK Base station. It surveyed in to 2 ft. Has anyone else run into this issue? Did I need to survey in the base station even more?
Hardware that I am using.
Mrobotics with Rover 4.2
GPS Yaw with two zed f9ps


It looks like you’re well on your way! And while the tune can almost always be improved, that’s not the first place to look in this case.
You have fallen prey to what I think is a fundamental misunderstanding of RTK GPS. You are not the first! I will try to explain.
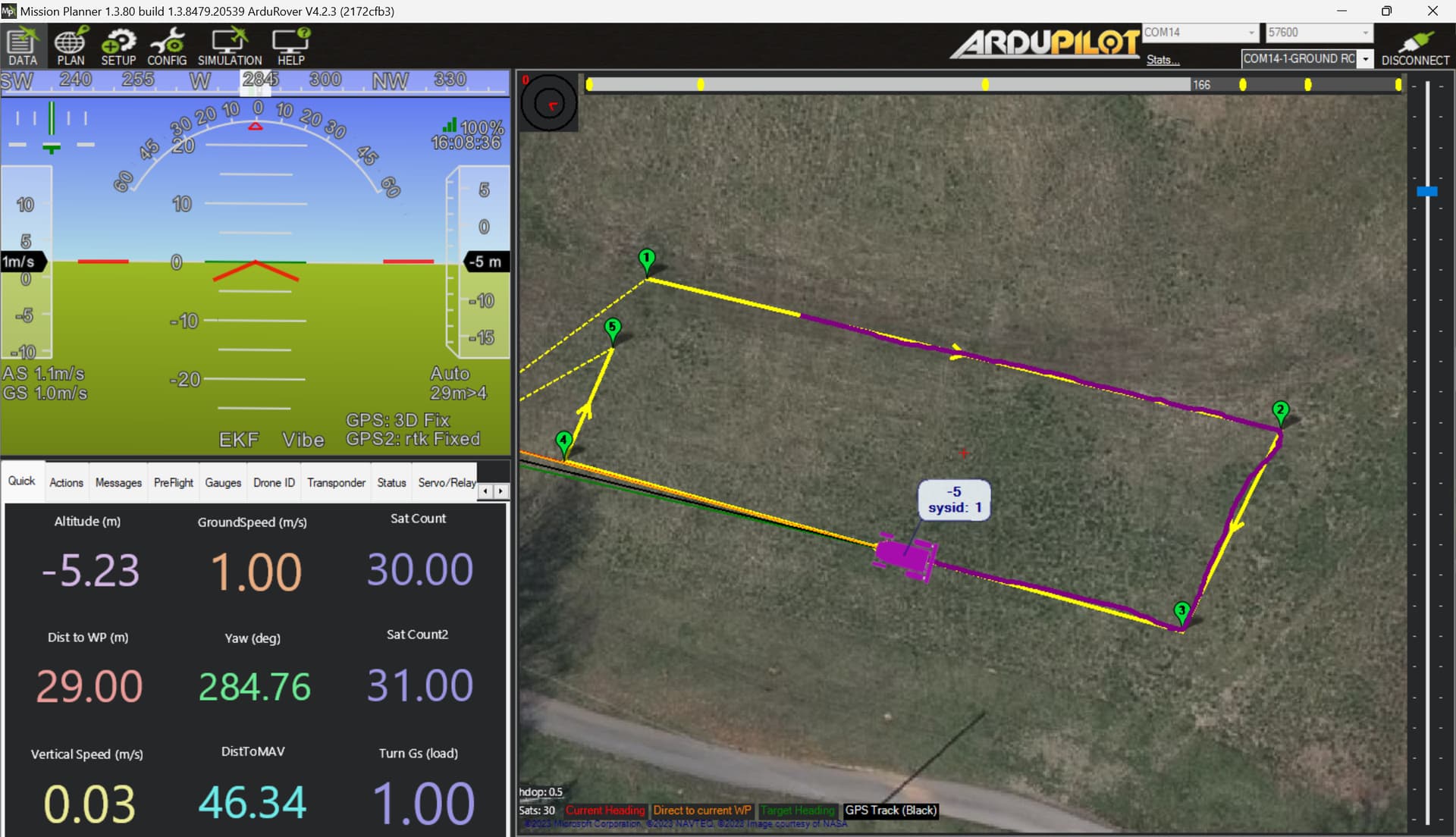
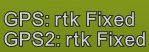
You are not using RTK GPS the way you think you are. The bottom right corner of the HUD should look like this:
Instead, GPS1 indicates “3D Fix,” which isn’t even a great non-corrected fix (3D DGPS is a slightly better fix state). This means that you are only using a correctly configured moving baseline (GPS-for-yaw) without external corrections. So, GPS2 knows very precisely where it is RELATIVE to GPS1, but GPS1 is only getting basic satellite data without the benefit of RTCM3.
To get more accurate ABSOLUTE position, GPS1 needs an external correction source, such as a fixed base installation or NTRIP via the internet.
Depending on your location, there may be public NTRIP available. Look here, to start. Click on “View All” to see a map. Some states also offer free public NTRIP. If one of those services is available, Mission Planner can stream it to your mower with minimal additional configuration.
If you don’t have an NTRIP site close by, you’ll need to set up a yet another RTK-capable GPS as a fixed base at a known location. THAT’S where the survey-in feature can be handy.
3 Likes
Thank you so much for the help! I will take a look to see if there are any base stations in my area. If I connect to a NTRIP source or set up my own base station, will that provide corrections to both GPS units on the mower or just one? If you set up your own base station how long do you recommend surveying it in for or what accuracy do you survey in to? I will try to do some testing in the coming week.
RTCM3 streamed to the autopilot over a telemetry link will provide corrections to any connected GPS that is set up to receive them. In the case of an ArduPilot moving base config, only GPS1 will receive those, and then it will pass its own correction data on to GPS2 for heading calculation.
While some may find this to be a controversial statement, it actually doesn’t matter how long you survey in, so long as you use the exact same physical location and set of coordinates for each use. All corrected positioning is relative to that location, so a consistent setup will produce consistent results.
That said, if you want to set your base station up to provide RTCM3 to an upstream NTRIP site like RTK2Go (as many of us have), you should really use a literally surveyed location (as in by an actual surveyor with proper equipment) so that you are providing good data to those who may connect. Failing that, I aim for 0.02-0.05m displayed precision, which takes about a full 24 hours of survey-in time, but even then, it’s just an estimate, and it may not actually be as precise as it reports.
1 Like
I like this pic of the inside of what you used. I will start to make my TOY BOX
1 Like
@Dean_Pierce welcome to the Ardupilot community. There is has been recent conversations this spring/summer on starting new mower builds over on the “Best Gear for Starting ArduPilot Mower” discussion blog that might me useful for someone just starting into this type of build. It takes a bit of learning and a lot of commitment to make these things happen. A mower is a fun project and if you have a lot of mowing, and they are very useful.
One of the most useful things for a new user to do is learn how to navigate the numerous conversation threads, and the extensive collection of information available on the Ardupilot website.
Ditto on @SJohnson 's paint - pro gig for sure…
And one tid bit to keep in mind: Once you perform a survey-in to whatever level of precision you want, generally you would never want to do it again. Each time you perform a survey-in, the base is going to settle into a different lat-lon reading for itself. The physical points for any previously created waypoints will now be offset.
4 Likes
I just wanted to put a post out there to let people know that @Swebre2023 is hosting the MowStock 2024 this year in Louisiana and it is a great place to compare notes and to see some working autonomous mowers of many types.
Our thanks go out to @Swebre2023 for hosting this big event!
.
DATE CORRECTION! MOWSTOCK 2024 - March 15-17, Church point, LA)-,Rover/Mower/Drone%20Folks!,best%20practices%20and%20share%20experiences%20with%20putting%20these%20autonomous%20contraptions%20together.,-We%20will%20have
3 Likes
Has any worked on a bagger for collections clippings?
Something that can sense when its hopper is full, deposit is load, and then continue mowing?
Not to my knowledge. Most of us are mowing acres at a time. You don’t bag that!
@Christopher_Milner has a use case for residential mowing and may have given that some thought.
I was thinking I could have several mowers going at once and use them to make silage
Wouldn’t you just mow into windrows and then cover them for silage?
I’m not familiar with bagging in that application. Not that you’re wrong. But it seems cumbersome.
Silage needs to be collected to be stored. It can be mowed and windrowed and then chopped into a silage wagon or truck and unloaded into a pile, silage pit, or bagged. Corn silage is cut and chopped into a truck. It would be awesome to have a mower work with a little trailer that could unload itself.
I don’t know of anyone specifically doing that, but it sounds possible. You’d need to devise a method of measuring the collected clippings by volume or weight. And when it exceeds some threshold, you offload and return to the last point of mowing/cutting.
All of that is possible via scripting and offboard sensing.
This little rake made for a mower caught my eye the other day, mainly because it is a copy of the big boy rakes. Compare:

with:

It’s just cute!
Yard Tuff ACR-500T 60 In Steel Tow Behind Acreage Rake w/ Pin Style Hitch - Walmart.com
2 Likes
Is the a way to use multiple mowers at once to mow a single area cooperatively? Swarm style?