Hi all. The Eachine EX4 is apparently a rebranded C-Fly Faith/JJRC X12. This uses the same C-Fly Android app as the JJRC X9/C-Fly Dream (loaded with ArduCopter parameters). The JJRC X12/EX4 is apparently very similar to the Dream/X9 but with a 3axis gimbal and longer battery life.
I’ve been asked if there’s a way to connect Mission Planner/QGroundControl to alter parameters, etc. on this unit. However, this unit does not have an easily accessible standard USB port. It does have a four pin connector hidden under the label in the battery compartment, a very tiny Molex. Even with the matching male connector it’s very difficult to work with given the extremely small size of the pins, and cannot be accessed with the battery in place.
Supposedly (based on discussions I’ve seen elsewhere) it is a USB port. And preliminary tests (difficult again due to the small size of the connector) suggest that it indeed may be a USB port given the interpin values measured. However, even if the connector was easier to deal with, I wouldn’t want to risk hooking up USB and blowing it out unless I was 100% sure it’s a USB port. It may be easier to access internally, but the unit hasn’t been disassembled at this time.
Since the Wi-Fi interface on the unit is not using encryption (!) it is possible to connect directly to the Wi-Fi AP on the unit and nmap it, but it may be using nonstandard MAVLink functions. I don’t know if Mission Planner access or other ways to change parameters are practical through this route. The unit seems to routinely power itself down after some number of minutes sitting idle.
Anyway, the bottom line is that any suggestions on how to alter the unit’s parameters and/or ideally connect to Mission Planner, etc. would be greatly appreciated. If I absolutely have to disassemble it I’m sure the owner will permit it, but I’d prefer to avoid this if possible. Thanks very much!
Updating that I’ve made considerable progress with the Faith/EX4/X12 – with a major proviso. That connector indeed turned out to be USB, and I’ve successfully attached it to several systems. On Linux it identifies correctly in the system logs as a PX4, and the appropriate /dev/ttyACM0 port is created. Other systems also recognize the device when plugged in. That’s the good news.
That bad news is that I’ve so far been unable to actually communicate from Mission Planner or QGC, despite trying every trick I know. The port will connect, but there’s apparently no heartbeat being detected and everything eventually times out. So that’s the current status. As before, all ideas appreciated! Thanks.
Success! Worked on this more and now have the Faith/X12/EX4 connecting successfully with both Mission Planner and QGroundControl. Let me know if you want any details. Thanks.
I’m connected through an internal port. I have plenty of photos. I’ll write this up in some detail after I finish installing an external connector, which I may be able to install today. It’s necessary to drill a very small hole to bring out the conductors. That aspect is easy.
This is 2.2 is same to 2.1 board and gyro with wire troll
Gyro not total incapsuled. With pcb
The 2.3 board have gyro wothout the wire troll. And gyro is total black incapsulated.
With connector gyro reverse.
Hello friend i have one question i need fix on drone jjrc x9.
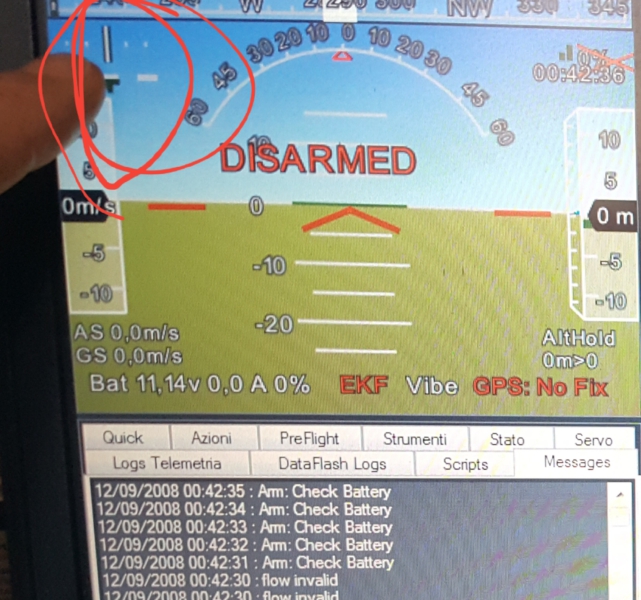
Connected to mission planner i have one error
Flow invalid.
I not remember if this messager hare one realy error…
And top left display for mission planner have one image same one gyro, if use one long cable usb have tested fly this gyro is animated in the pc screen ? I not remember… if this in old test have moving…
Dredan you have bakup for your 2.2 original parameter?
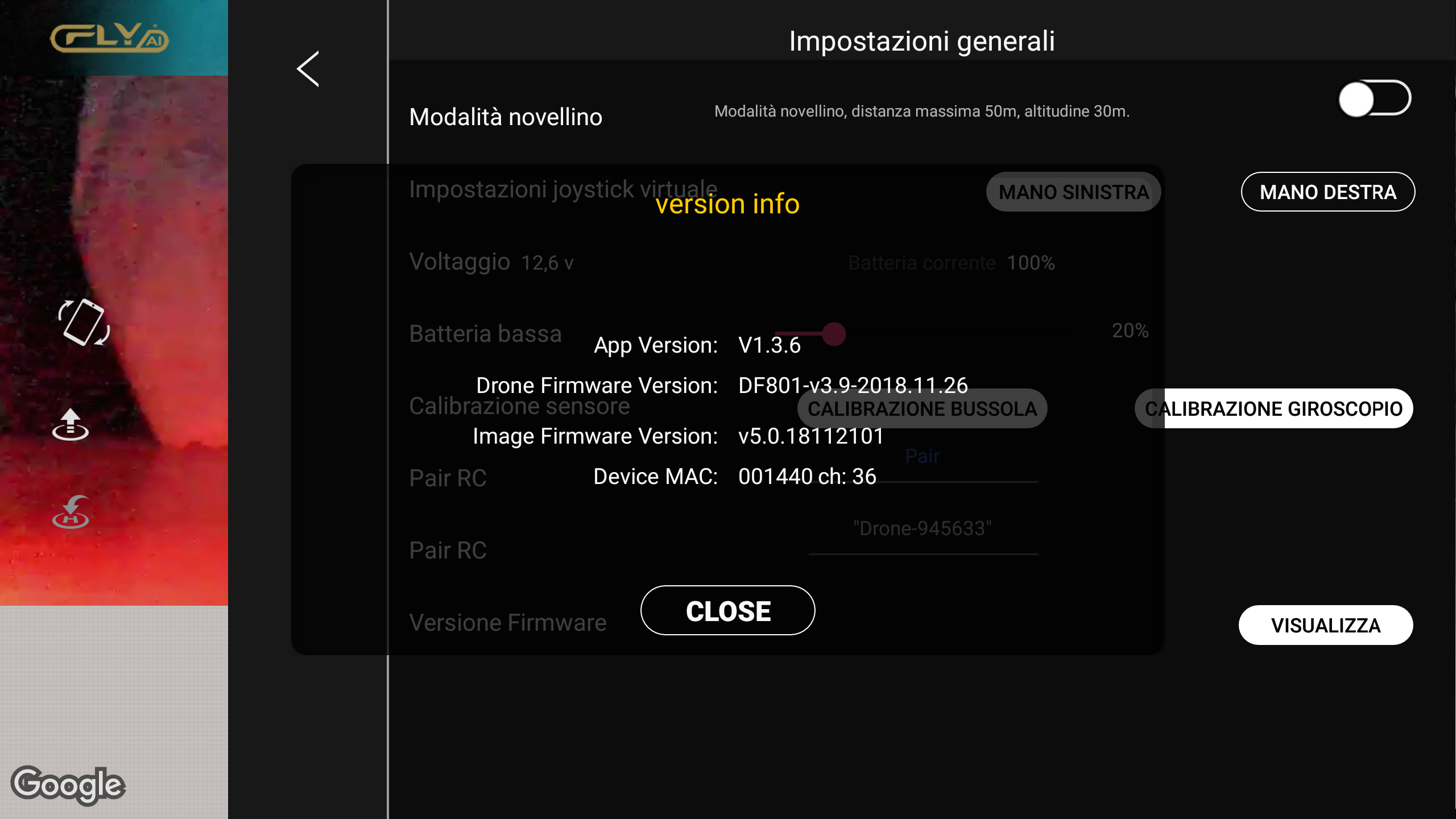
You remember wath version have view in the app
“Drone fw version” ?
Every hardware is supposed to have dedicated firmware. And every firmware have version . In this backup for gitub this information hare not added.
Is it possibol to specify the firmware version.
With this hare possible sharing update.
Thank you friend:muscle:
Hi. I managed to get the file from a Facebook page, JJRC X9 Heron & CFly Dream - European Forum. The file is a parameter file not firmware. It does not specify firmware version. I used mission planner to load it and it’s working great.
One other question
Possible you connect jjrc x9 to mission planer and arm drone in the head fly. Verify if gyroscope in the picture working.
And verify if have red message invalid flow ?
I don’t have the st link to read the firmware. So I can’t share. I ordered one hopefully it arrives soon and will be able to backup and share.
I will check the other issue on mission planner and report back.
Yeahh dreadan all ok in the resoldering connector one little problem woth pwm 2 and 3 micro cortocircuit and two motor have same speed …
Adjusted and working thanks…
For future need testing new firmware thanks best regards
Hi, I would be very interested. Have an X9 that doesn’t bring its drone-xxxx WIFI AP online. So a firmware and procedure on how to flash (what software?) over USB would be appreciated.
Hello @BPE71 ! my X9 doesn’t bring an AP since I reflashed it. Though with the good firmware & multiple resets. I’m working on it, but it seems it’s a configuration problem (solvable by USB / Ardupilot / Qgroundcontrol). I’ll update my research here or on my Github page.