@ppoirier More important is the lack of integration with the FC at the EKF level. We are missing parameters to correctly implement a robust vision estimation fusion within the EKF for the moment. This is causing the EKF to diverge easily and cannot recover elegantly, forcing the FC to switch to a lower level of control that keeps the attitude but carry the bad horizontal and vertical estimates thus causing a sudden vehicle runaway from which you have to manually recover…sometimes with cold sweat…
The T265 has been working relatively well for me, but there are few cases where the flight controller position rapidly diverges from the position being sent from the T265. Is this what you are talking about? Here is one example:
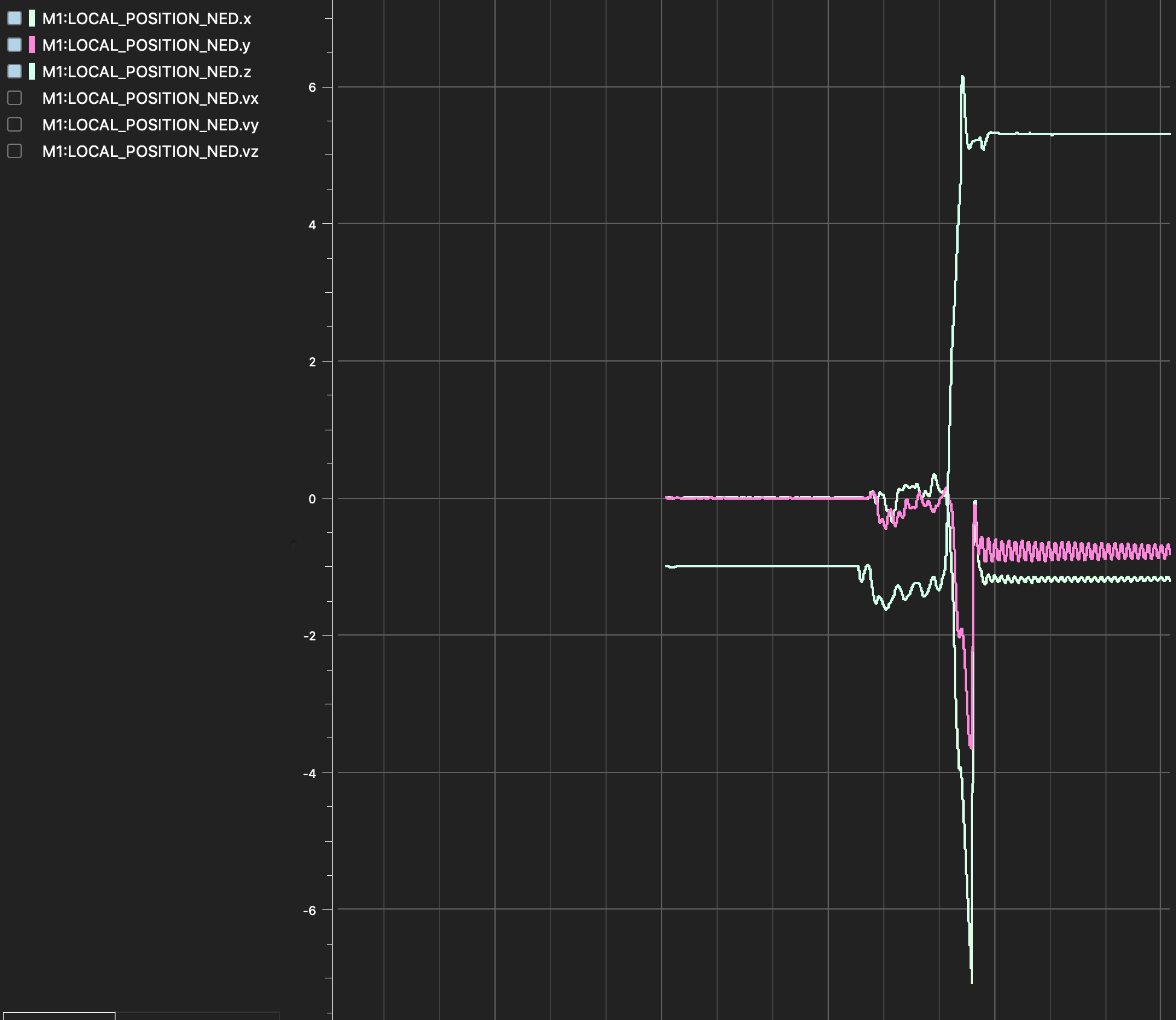
In this particular case, it looks like x and y are corrected shortly after the glitch, but this isn’t actually the case. The T265 was still sending positions something like [0, 0, -1] at the end of that plot. Sometimes all dimensions get shifted by a huge constant value and stay there in spite of continuous messages from the T265 which specify otherwise.